组合转子平衡方法、组合转子及计算机可读存储介质与流程
1.本发明涉及航空发动机装配领域,具体涉及一种组合转子平衡方法、组合转子及计算机可读存储介质。
背景技术:
2.航空发动机装配过程中,需对高压压气机转子与高压涡轮转子两单元体分别进行平衡工序,平衡结束后高压压气机转子与高压涡轮转子具有较低的剩余不平衡量,但是当高压压气机转子与高压涡轮转子连接装配成高压转子后,受组合偏心矢量的影响,高压转子的初始不平衡量处于较高状态,双面不平衡量通常达到1000g
·
mm(1000克乘毫米)左右,若想降低高压转子的初始不平衡量,目前常用的做法是对高压压气机转子与高压涡轮转子装配得到的高压转子进行组合平衡,在高压转子的前后校正面重新配置平衡块。这种方法需要额外进行平衡操作,不仅浪费时间,而且在进行组合平衡的过程中打破了高压压气机转子和高压涡轮转子分别的原有平衡状态,影响发动机高速运转过程中振动状态分析。
技术实现要素:
3.本发明的目的在于提供一种组合转子平衡方法、组合转子及计算机可读存储介质,用于改善对组合转子进行组合平衡破坏单元转子原有平衡状态的情况。
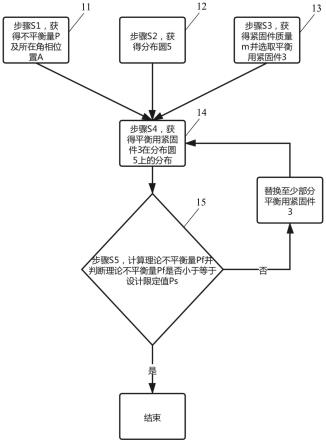
4.根据本发明实施例的一个方面的一种组合转子平衡方法,该组合转子平衡方法包括步骤s1、步骤s2、步骤s3、步骤s4和步骤s5。步骤s1,获得组合转子的不平衡量以及所述不平衡量所在角相位置,在所述组合转子上,构建坐标系,所述坐标系以所述组合转子的转动中心为原点,以所述角相位置所在的一个径向为横轴、垂直于所述横轴的另一个径向为纵轴;步骤s2,获得所述组合转子的分布圆,其中,所述分布圆的圆心与所述坐标系的原点重合,所述分布圆与所述横轴相交,限定第一交点和第二交点,所述第一交点位于所述角相位置;步骤s3,获得多个紧固件及每个紧固件的紧固件质量,其中,所述多个紧固件的紧固件质量服从正态分布,从所述多个紧固件中选取至少部分紧固件作为平衡用紧固件;步骤s4,将所述平衡用紧固件周向分布于所述分布圆,在所述分布圆上,自所述第一交点至所述第二交点,所述平衡用紧固件质量逐渐增大;步骤s5,计算所述组合转子的理论不平衡量,并比较所述理论不平衡量与设计限定值:所述理论不平衡量满足所述设计限定值,则确定所述平衡用紧固件的所述分布;否则替换至少部分所述平衡用紧固件,重新执行所述步骤s4和步骤s5。
5.在一个或多个实施例中,所述正态分布具有期望值μ和标准差σ,所述第一交点处的所述平衡用紧固件质量小于μ-5σ,所述第二交点处的所述平衡用紧固件质量大于μ+5σ。
6.在一个或多个实施例中,所述替换至少部分所述平衡用紧固件包括将所述理论不平衡量与所述设计限定值的差值与阈值比较:所述差值小于所述阈值,替换所述坐标系的纵轴处的所述平衡用紧固件;否则替换所述坐标系的横轴处的所述平衡用紧固件。
7.在一个或多个实施例中,所述步骤s3中,所述平衡用紧固件的选取采用等距抽样。
8.根据本发明实施例的另一个方面的一种组合转子,该组合转子通过上述的组合转子平衡方法获得。
9.根据本发明实施例的又一个方面的一种计算机可读存储介质,该计算机可读存储介质存储指令,所述指令用于执行上述的组合转子平衡方法。
10.本发明实施例具备如下有益效果:
11.在紧固件质量满足设计要求的基础上,借用紧固件加工过程产生的质量不均衡性,根据紧固件的质量对紧固件在组合转子上的设置进行分布,降低组合转子的不平衡量,同时,紧固件作为单元转子间的连接件,通过其分布降低组合转子的不平衡量不会破坏单元转子经过分别平衡后的原有平衡状态。
附图说明
12.本发明的上述的以及其他的特征、性质和优势将通过下面结合附图和实施例的描述而变得更加明显,其中:
13.图1是高压转子的结构示意图;
14.图2是高压转子的结构示意图;
15.图3是组合转子平衡方法的示意图;
16.图4是紧固件质量的正态分布曲线的示意图;
17.图5是紧固件的分布圆的示意图;
18.图6是组合转子平衡方法的流程图。
具体实施方式
19.根据本发明实施例的一个方面,提供一种组合转子平衡方法,该组合转子平衡方法的平衡对象以高压转子4进行说明并示出。如图1和图2所示,航空发动机装配中,作为单元体的高压压气机转子1与高压涡轮转子2连接彼此,装配成作为组合体的高压转子4。“径向”等方位术语以高压转子4的紧固件装配平面为参考。如本文所使用的,术语“第一”、“第二”可以互换使用以将一个特征与另一个特征区分开,并且不旨在表示各个特征在各个实施方式中必须位于如图所示的位置。
20.在高压压气机转子1与高压涡轮转子2装配成高压转子4前,高压压气机转子1与高压涡轮转子2分别完成平衡工序,平衡结束后高压压气机转子1与高压涡轮转子2具有较低的剩余不平衡量,但是当高压压气机转子1与高压涡轮转子2连接装配成高压转子4后,受组合偏心矢量的影响,高压转子4的初始不平衡量处于较高状态,双面不平衡量通常达到1000g
·
mm(1000克乘毫米)左右,若想降低高压转子4的初始不平衡量,目前常用的做法是对作为组合体的高压转子4进行组合平衡,在高压转子4的前后校正面重新配置平衡块。这种方法需要额外进行平衡操作,不仅浪费时间,而且在进行组合平衡的过程中打破了作为单元体的高压压气机转子1和高压涡轮转子2经过分别平衡后的原有平衡状态,影响发动机高速运转过程中振动状态分析。
21.如图6所示,该组合转子平衡方法对高压转子4进行平衡包括方框11所示的步骤s1、方框12所示的步骤s2、方框13所示的步骤s3、方框14所示的步骤s4和菱形框15所示的步骤s5。
22.如图6中方框11所示的步骤s1,获得不平衡量p及所在角相位置a,获得高压转子4在未装配平衡用紧固件3情况下的不平衡量p以及不平衡量p所在的角相位置a,并在高压转子4上,构建坐标系,坐标系以高压转子4的转动中心为原点o,以角相位置a所在的一个径向为横轴x、垂直于横轴x的另一个径向为纵轴y,角相位置a与该坐标系在图3中示出。
23.在本实施例中,高压转子4的不平衡量p以及不平衡量p所在的角相位置a通过从预先设置的数据库中读取获得。在另一个或多个实施例中,不平衡量p及所在角相位置a通过机器(如动平衡试验机)测量的方式获得。在又一个或多个实施例中,不平衡量p及所在角相位置a通过人工测量的方式获得。在又一个或多个实施例中,不平衡量p及所在角相位置a通过其他方式获得。
24.如图6中方框12所示的步骤s2,获得分布圆5,获得高压转子4的分布圆5,其中,分布圆5的圆心与坐标系的原点o重合,分布圆5与横轴x相交,得到第一交点6和第二交点7,第一交点6位于角相位置a,第二交点7位于角相位置a的相反处,第一交点6、第二交点7以及分布圆5在图3中示出。
25.在本实施例中,分布圆5通过从预先设置的数据库读取获得。在另一个或多个实施例中,分布圆5通过机器测量的方式获得。在又一个或多个实施例中,分布圆5通过人工测量的方式获得。在又一个或多个实施例中,分布圆5通过其他方式获得。
26.如图6中方框13所示的步骤s3,获得紧固件质量m并选取平衡用紧固件3,获得多个紧固件及每个紧固件的紧固件质量m,其中,多个紧固件的紧固件质量m服从正态分布n(μ,σ2),正态分布n(μ,σ2)具有期望值μ和标准差σ,正态分布n(μ,σ2)的正态分布曲线8如图4所示,正态分布n(μ,σ2)的概率密度函数f(m)如下式所示:
[0027][0028]
其中,π表示圆周率,σ表示标准差,μ表示期望值,m表示紧固件质量,e表示自然常数;
[0029]
并从多个紧固件中选取至少部分紧固件作为平衡用紧固件3,平衡用紧固件3的选取采用等距抽样。
[0030]
在本实施例中,紧固件质量m通过从预先设置的数据库中读取获得。在另一个或多个实施例中,紧固件质量m通过机器对紧固件的质量进行测量获得。在又一个或多个实施例中,紧固件质量m通过人工对紧固件的质量进行测量获得。在又一个或多个实施例中,紧固件质量m通过其他方式获得。
[0031]
在本实施例中,平衡用紧固件3的选取采用等距抽样,具体地,将多个紧固件根据紧固件质量m的数值大小进行排列获得有序样本,并从该有序样本中进行等距抽样,以获得平衡用紧固件3。在另一个或多个实施例中,对包含多个紧固件的无序样本进行等距抽样,获得平衡用紧固件3。在又一个或多个实施例中,平衡用紧固件3通过简单随机抽样的方式从包含多个紧固件的样本中选取。在又一个或多个实施例中,平衡用紧固件3通过其他方式从包含多个紧固件的样本中选取。
[0032]
术语“步骤s1”、“步骤s2”和“步骤s3”可以互换使用以将一个步骤与另一个步骤区分开,并不旨在表示“步骤s1”、“步骤s2”和“步骤s3”在实施方式中的顺序,步骤s1、步骤s2和步骤s3在实施方式中的顺序不受限制。
[0033]
如图6中方框14所示的步骤s4,获得平衡用紧固件3在分布圆5上的分布,如图3所示,将平衡用紧固件3周向分布于分布圆5,并按照正态分布n(μ,σ2)分布,具体地,在分布圆5上,第一交点6处的平衡用紧固件3的紧固件质量m小于μ-5σ,第二交点7处的平衡用紧固件3的紧固件质量m大于μ+5σ,坐标系的纵轴y与分布圆5的交点处的平衡用紧固件3的紧固件质量m接近μ,自第一交点6至第二交点7,平衡用紧固件3的紧固件质量m逐渐增大,并且平衡用紧固件3的分布能够生成正态分布n(μ,σ2)的正态分布曲线8,该正态分布曲线8的横轴重合于坐标系的横轴x,正态分布曲线8的对称轴位于曲线正中央并重合于坐标系的纵轴y。
[0034]
不平衡量p的所在角相位置a可能指向分布圆5上的任意位置,当角相位置a指向两个相邻的平衡用紧固件3的安装位的中间位置时,第一交点6、第二交点7并不存在平衡用紧固件3,在这种情况下,“第一交点6处的平衡用紧固件3”的含义是指相邻第一交点6的平衡用紧固件3,“第二交点7处的平衡用紧固件3”的含义是指相邻第二交点7的平衡用紧固件3。同理,如图3所示,坐标系的纵轴y与分布圆5的交点处于两个相邻的平衡用紧固件3的安装位的中间位置,在这种情况下,“坐标系的纵轴y与分布圆5的交点处的平衡用紧固件3”的含义为相邻纵轴y的平衡用紧固件3。
[0035]
在本实施例中,平衡用紧固件3通过计算机软件虚拟地分布在分布圆5上。在另一个或多个实施例中,平衡装置将平衡用紧固件3物理分布在高压转子4的分布圆5上。在又一个或多个实施例中,平衡用紧固件3人工地被分布在分布圆5上。在又一个或多个实施例中,平衡用紧固件3通过其他方式分布在分布圆5上。
[0036]
如图6中菱形框15所示的步骤s5,计算理论不平衡量pf并判断理论不平衡量pf是否小于等于设计限定值ps,在平衡用紧固件3的分布下,计算高压转子4的理论不平衡量pf,理论不平衡量pf的计算式如下:
[0037][0038]
其中,n为分布圆5上平衡用紧固件3的总数量,i表示分布圆5上平衡用紧固件3的标号,i=1,2,3,
…
,n,标号为1(即i=1)的平衡用紧固件3在分布圆5上的位置如图5所示,在图5中,i沿顺时针逐渐增大,mi表示标号为i的平衡用紧固件3的紧固件质量m,r为分布圆5的半径,p为高压转子4在未装配紧固件情况下的不平衡量,a为不平衡量p所在的角相位置;
[0039]
并比较理论不平衡量pf与设计限定值ps:
[0040]
理论不平衡量pf小于等于设计限定值ps,则确定平衡用紧固件3的分布;否则
[0041]
替换至少部分平衡用紧固件3,重新执行步骤s4和步骤s5,其中,替换至少部分平衡用紧固件3包括将理论不平衡量pf与设计限定值ps的差值pd与阈值p
t
比较:
[0042]
差值pd小于阈值p
t
,替换坐标系的纵轴y处的平衡用紧固件3;否则替换坐标系的横轴x处的平衡用紧固件3。
[0043]
重新执行的步骤s5计算在经过替换后的平衡用紧固件3的分布下,高压转子4的理
论不平衡量pf,并比较理论不平衡量pf与设计限定值ps,理论不平衡量pf小于等于设计限定值ps,则确定经过替换后的平衡用紧固件3的分布;否则
[0044]
重新执行步骤s4和步骤s5,直至在步骤s5中,理论不平衡量pf小于等于设计限定值ps,确定经过替换后的平衡用紧固件3的分布。
[0045]
如图3所示,坐标系的纵轴y与分布圆5的交点可能处于两个相邻的平衡用紧固件3的安装位的中间位置,在这种情况下,“纵轴y处的平衡用紧固件3”的含义是指相邻纵轴y与分布圆5交点的平衡用紧固件3。同理,坐标系的横轴x与分布圆5的交点可能处于两个相邻的平衡用紧固件3的安装位的中间位置,在这种情况下,“横轴x处的平衡用紧固件3”的含义是指相邻横轴x与分布圆5交点的平衡用紧固件3。
[0046]
在本实施例中,理论不平衡量pf的计算及其与设计限定值ps的比较通过计算机软件完成。在另一个或多个实施例中,理论不平衡量pf的计算及其与设计限定值ps的比较通过人工计算并比较完成。在又一个或多个实施例中,理论不平衡量pf的计算及其与设计限定值ps的比较通过其他方式完成。
[0047]
在本实施例中,设计限定值ps为设计所允许的上限值,理论不平衡量pf小于等于设计限定值ps为确定平衡用紧固件3的判断条件。在另一个或多个实施例中,设计限定值ps通过安全系数表示,由理论不平衡量pf计算得出的系数大于设计限定值ps代表的安全系数,则确定平衡用紧固件3的分布。在又一个或多个实施例中,设计限定值ps采用其他表现形式,理论不平衡量pf与设计限定值ps满足特定关系,则确定平衡用紧固件3的分布。
[0048]
在本实施例中,组合转子平衡方法的平衡对象以高压转子4进行说明并示出,该组合转子平衡方法的平衡对象并不限于高压转子4,在另一个或多个实施例中,在作出适当的适应性调整后,该组合转子平衡方法的平衡对象为由单元体装配得到的其他组合转子。
[0049]
根据本发明实施例的另一个方面,提供一种高压转子4,该高压转子4通过上述的组合转子平衡方法获得,如图1和图2所示,该高压转子4包括作为单元体的高压压气机转子1与高压涡轮转子2,以及作为连接件的平衡用紧固件3,高压压气机转子1与高压涡轮转子2通过平衡用紧固件3连接彼此,装配成作为组合体的高压转子4,平衡用紧固件3在高压转子4上的分布通过上述的组合转子平衡方法获得,如图6所示,包括方框11所示的步骤s1、方框12所示的步骤s2、方框13所示的步骤s3、方框14所示的步骤s4和菱形框15所示的步骤s5。
[0050]
如图6中方框11所示的步骤s1,获得不平衡量p及所在角相位置a,获得高压转子4在未装配平衡用紧固件3情况下的不平衡量p以及不平衡量p所在的角相位置a,并在高压转子4上,构建坐标系,坐标系以高压转子4的转动中心为原点o,以角相位置a所在的一个径向为横轴x、垂直于横轴x的另一个径向为纵轴y,角相位置a与该坐标系在图3中示出。
[0051]
在本实施例中,高压转子4的不平衡量p以及不平衡量p所在的角相位置a通过从预先设置的数据库中读取获得。在另一个或多个实施例中,不平衡量p及所在角相位置a通过机器(如动平衡试验机)测量的方式获得。在又一个或多个实施例中,不平衡量p及所在角相位置a通过人工测量的方式获得。在又一个或多个实施例中,不平衡量p及所在角相位置a通过其他方式获得。
[0052]
如图6中方框12所示的步骤s2,获得分布圆5,获得高压转子4的分布圆5,其中,分布圆5的圆心与坐标系的原点o重合,分布圆5与横轴x相交,得到第一交点6和第二交点7,第一交点6位于角相位置a,第二交点7位于角相位置a的相反处,第一交点6、第二交点7以及分
布圆5在图3中示出。
[0053]
在本实施例中,分布圆5通过从预先设置的数据库读取获得。在另一个或多个实施例中,分布圆5通过机器测量的方式获得。在又一个或多个实施例中,分布圆5通过人工测量的方式获得。在又一个或多个实施例中,分布圆5通过其他方式获得。
[0054]
如图6中方框13所示的步骤s3,获得紧固件质量m并选取平衡用紧固件3,获得多个紧固件及每个紧固件的紧固件质量m,其中,多个紧固件的紧固件质量m服从正态分布n(μ,σ2),正态分布n(μ,σ2)具有期望值μ和标准差σ,正态分布n(μ,σ2)的正态分布曲线8如图4所示,正态分布n(μ,σ2)的概率密度函数f(m)如下式所示:
[0055][0056]
其中,π表示圆周率,σ表示标准差,μ表示期望值,m表示紧固件质量,e表示自然常数;
[0057]
并从多个紧固件中选取至少部分紧固件作为平衡用紧固件3,平衡用紧固件3的选取采用等距抽样。
[0058]
在本实施例中,紧固件质量m通过从预先设置的数据库中读取获得。在另一个或多个实施例中,紧固件质量m通过机器对紧固件的质量进行测量获得。在又一个或多个实施例中,紧固件质量m通过人工对紧固件的质量进行测量获得。在又一个或多个实施例中,紧固件质量m通过其他方式获得。
[0059]
在本实施例中,平衡用紧固件3的选取采用等距抽样,具体地,将多个紧固件根据紧固件质量m的数值大小进行排列获得有序样本,并从该有序样本中进行等距抽样,以获得平衡用紧固件3。在另一个或多个实施例中,对包含多个紧固件的无序样本进行等距抽样,获得平衡用紧固件3。在又一个或多个实施例中,平衡用紧固件3通过简单随机抽样的方式从包含多个紧固件的样本中选取。在又一个或多个实施例中,平衡用紧固件3通过其他方式从包含多个紧固件的样本中选取。
[0060]
术语“步骤s1”、“步骤s2”和“步骤s3”可以互换使用以将一个步骤与另一个步骤区分开,并不旨在表示“步骤s1”、“步骤s2”和“步骤s3”在实施方式中的顺序,步骤s1、步骤s2和步骤s3在实施方式中的顺序不受限制。
[0061]
如图6中方框14所示的步骤s4,获得平衡用紧固件3在分布圆5上的分布,如图3所示,将平衡用紧固件3周向分布于分布圆5,并按照正态分布n(μ,σ2)分布,具体地,在分布圆5上,第一交点6处的平衡用紧固件3的紧固件质量m小于μ-5σ,第二交点7处的平衡用紧固件3的紧固件质量m大于μ+5σ,坐标系的纵轴y与分布圆5的交点处的平衡用紧固件3的紧固件质量m接近μ,自第一交点6至第二交点7,平衡用紧固件3的紧固件质量m逐渐增大,并且平衡用紧固件3的分布能够生成正态分布n(μ,σ2)的正态分布曲线8,该正态分布曲线8的横轴重合于坐标系的横轴x,正态分布曲线8的对称轴位于曲线正中央并重合于坐标系的纵轴y。
[0062]
不平衡量p的所在角相位置a可能指向分布圆5上的任意位置,当角相位置a指向两个相邻的平衡用紧固件3的安装位的中间位置时,第一交点6、第二交点7并不存在平衡用紧固件3,在这种情况下,“第一交点6处的平衡用紧固件3”的含义是指相邻第一交点6的平衡用紧固件3,“第二交点7处的平衡用紧固件3”的含义是指相邻第二交点7的平衡用紧固件3。同理,如图3所示,坐标系的纵轴y与分布圆5的交点处于两个相邻的平衡用紧固件3的安装
位的中间位置,在这种情况下,“坐标系的纵轴y与分布圆5的交点处的平衡用紧固件3”的含义为相邻纵轴y的平衡用紧固件3。
[0063]
在本实施例中,平衡用紧固件3通过计算机软件虚拟地分布在分布圆5上。在另一个或多个实施例中,平衡装置将平衡用紧固件3物理分布在高压转子4的分布圆5上。在又一个或多个实施例中,平衡用紧固件3人工地被分布在分布圆5上。在又一个或多个实施例中,平衡用紧固件3通过其他方式分布在分布圆5上。
[0064]
如图6中菱形框15所示的步骤s5,计算理论不平衡量pf并判断理论不平衡量pf是否小于等于设计限定值ps,在平衡用紧固件3的分布下,计算高压转子4的理论不平衡量pf,理论不平衡量pf的计算式如下:
[0065][0066]
其中,n为分布圆5上平衡用紧固件3的总数量,i表示分布圆5上平衡用紧固件3的标号,i=1,2,3,
…
,n,标号为1(即i=1)的平衡用紧固件3在分布圆5上的位置如图5所示,在图5中,i沿顺时针逐渐增大,mi表示标号为i的平衡用紧固件3的紧固件质量m,r为分布圆5的半径,p为高压转子4在未装配紧固件情况下的不平衡量,a为不平衡量p所在的角相位置;
[0067]
并比较理论不平衡量pf与设计限定值ps:
[0068]
理论不平衡量pf小于等于设计限定值ps,则确定平衡用紧固件3的分布;否则
[0069]
替换至少部分平衡用紧固件3,重新执行步骤s4和步骤s5,其中,替换至少部分平衡用紧固件3包括将理论不平衡量pf与设计限定值ps的差值pd与阈值p
t
比较:
[0070]
差值pd小于阈值p
t
,替换坐标系的纵轴y处的平衡用紧固件3;否则替换坐标系的横轴x处的平衡用紧固件3。
[0071]
重新执行的步骤s5计算在经过替换后的平衡用紧固件3的分布下,高压转子4的理论不平衡量pf,并比较理论不平衡量pf与设计限定值ps,理论不平衡量pf小于等于设计限定值ps,则确定经过替换后的平衡用紧固件3的分布;否则
[0072]
重新执行步骤s4和步骤s5,直至在步骤s5中,理论不平衡量pf小于等于设计限定值ps,确定经过替换后的平衡用紧固件3的分布。
[0073]
如图3所示,坐标系的纵轴y与分布圆5的交点可能处于两个相邻的平衡用紧固件3的安装位的中间位置,在这种情况下,“纵轴y处的平衡用紧固件3”的含义是指相邻纵轴y与分布圆5交点的平衡用紧固件3。同理,坐标系的横轴x与分布圆5的交点可能处于两个相邻的平衡用紧固件3的安装位的中间位置,在这种情况下,“横轴x处的平衡用紧固件3”的含义是指相邻横轴x与分布圆5交点的平衡用紧固件3。
[0074]
在本实施例中,理论不平衡量pf的计算及其与设计限定值ps的比较通过计算机软件完成。在另一个或多个实施例中,理论不平衡量pf的计算及其与设计限定值ps的比较通过人工计算并比较完成。在又一个或多个实施例中,理论不平衡量pf的计算及其与设计限定
值ps的比较通过其他方式完成。
[0075]
在本实施例中,设计限定值ps为设计所允许的上限值,理论不平衡量pf小于等于设计限定值ps为确定平衡用紧固件3的判断条件。在另一个或多个实施例中,设计限定值ps通过安全系数表示,由理论不平衡量pf计算得出的系数大于设计限定值ps代表的安全系数,则确定平衡用紧固件3的分布。在又一个或多个实施例中,设计限定值ps采用其他表现形式,理论不平衡量pf与设计限定值ps满足特定关系,则确定平衡用紧固件3的分布。
[0076]
在本实施例中,高压转子4通过上述的组合转子平衡方法获得。在另一个或多个实施例中,一种组合转子通过上述的组合转子平衡方法获得,该组合转子包括作为单元体的单元转子,以及作为连接件的平衡用紧固件3,单元转子通过平衡用紧固件3连接彼此,装配成作为组合体的组合转子,平衡用紧固件3在组合转子上的分布通过上述的组合转子平衡方法获得,具体包括上述步骤s1、步骤s2、步骤s3、步骤s4和步骤s5。
[0077]
根据本发明实施例的又一个方面,提供一种计算机可读存储介质,该计算机可读存储介质存储指令,指令用于执行上述的组合转子平衡方法,如图6所示,具体包括方框11所示的步骤s1、方框12所示的步骤s2、方框13所示的步骤s3、方框14所示的步骤s4和菱形框15所示的步骤s5。
[0078]
如图6中方框11所示的步骤s1,获得不平衡量p及所在角相位置a,获得高压转子4在未装配平衡用紧固件3情况下的不平衡量p以及不平衡量p所在的角相位置a,并在高压转子4上,构建坐标系,坐标系以高压转子4的转动中心为原点o,以角相位置a所在的一个径向为横轴x、垂直于横轴x的另一个径向为纵轴y,角相位置a与该坐标系在图3中示出。在本实施例中,高压转子4的不平衡量p以及不平衡量p所在的角相位置a通过从预先设置的数据库中读取获得。
[0079]
如图6中方框12所示的步骤s2,获得分布圆5,获得高压转子4的分布圆5,其中,分布圆5的圆心与坐标系的原点o重合,分布圆5与横轴x相交,得到第一交点6和第二交点7,第一交点6位于角相位置a,第二交点7位于角相位置a的相反处,第一交点6、第二交点7以及分布圆5在图3中示出。在本实施例中,分布圆5通过从预先设置的数据库读取获得。
[0080]
如图6中方框13所示的步骤s3,获得紧固件质量m并选取平衡用紧固件3,获得多个紧固件及每个紧固件的紧固件质量m,其中,多个紧固件的紧固件质量m服从正态分布n(μ,σ2),正态分布n(μ,σ2)具有期望值μ和标准差σ,正态分布n(μ,σ2)的正态分布曲线8如图4所示,正态分布n(μ,σ2)的概率密度函数f(m)如下式所示:
[0081][0082]
其中,π表示圆周率,σ表示标准差,μ表示期望值,m表示紧固件质量,e表示自然常数;
[0083]
并从多个紧固件中选取至少部分紧固件作为平衡用紧固件3,平衡用紧固件3的选取采用等距抽样。
[0084]
在本实施例中,紧固件质量m通过从预先设置的数据库中读取获得。
[0085]
在本实施例中,平衡用紧固件3的选取采用等距抽样,具体地,将多个紧固件根据紧固件质量m的数值大小进行排列获得有序样本,并从该有序样本中进行等距抽样,以获得平衡用紧固件3。在另一个或多个实施例中,对包含多个紧固件的无序样本进行等距抽样,
获得平衡用紧固件3。在又一个或多个实施例中,平衡用紧固件3通过简单随机抽样的方式从包含多个紧固件的样本中选取。在又一个或多个实施例中,平衡用紧固件3通过其他方式从包含多个紧固件的样本中选取。
[0086]
术语“步骤s1”、“步骤s2”和“步骤s3”可以互换使用以将一个步骤与另一个步骤区分开,并不旨在表示“步骤s1”、“步骤s2”和“步骤s3”在实施方式中的顺序,步骤s1、步骤s2和步骤s3在实施方式中的顺序不受限制。
[0087]
如图6中方框14所示的步骤s4,获得平衡用紧固件3在分布圆5上的分布,如图3所示,将平衡用紧固件3周向分布于分布圆5,并按照正态分布n(μ,σ2)分布,具体地,在分布圆5上,第一交点6处的平衡用紧固件3的紧固件质量m小于μ-5σ,第二交点7处的平衡用紧固件3的紧固件质量m大于μ+5σ,坐标系的纵轴y与分布圆5的交点处的平衡用紧固件3的紧固件质量m接近μ,自第一交点6至第二交点7,平衡用紧固件3的紧固件质量m逐渐增大,并且平衡用紧固件3的分布能够生成正态分布n(μ,σ2)的正态分布曲线8,该正态分布曲线8的横轴重合于坐标系的横轴x,正态分布曲线8的对称轴位于曲线正中央并重合于坐标系的纵轴y。在本实施例中,平衡用紧固件3通过计算机软件虚拟地分布在分布圆5上。
[0088]
不平衡量p的所在角相位置a可能指向分布圆5上的任意位置,当角相位置a指向两个相邻的平衡用紧固件3的安装位的中间位置时,第一交点6、第二交点7并不存在平衡用紧固件3,在这种情况下,“第一交点6处的平衡用紧固件3”的含义是指相邻第一交点6的平衡用紧固件3,“第二交点7处的平衡用紧固件3”的含义是指相邻第二交点7的平衡用紧固件3。同理,如图3所示,坐标系的纵轴y与分布圆5的交点处于两个相邻的平衡用紧固件3的安装位的中间位置,在这种情况下,“坐标系的纵轴y与分布圆5的交点处的平衡用紧固件3”的含义为相邻纵轴y的平衡用紧固件3。
[0089]
如图6中菱形框15所示的步骤s5,计算理论不平衡量pf并判断理论不平衡量pf是否小于等于设计限定值ps,在平衡用紧固件3的分布下,计算高压转子4的理论不平衡量pf,理论不平衡量pf的计算式如下:
[0090][0091]
其中,n为分布圆5上平衡用紧固件3的总数量,i表示分布圆5上平衡用紧固件3的标号,i=1,2,3,
…
,n,标号为1(即i=1)的平衡用紧固件3在分布圆5上的位置如图5所示,在图5中,i沿顺时针逐渐增大,mi表示标号为i的平衡用紧固件3的紧固件质量m,r为分布圆5的半径,p为高压转子4在未装配紧固件情况下的不平衡量,a为不平衡量p所在的角相位置;
[0092]
并比较理论不平衡量pf与设计限定值ps:
[0093]
理论不平衡量pf小于等于设计限定值ps,则确定平衡用紧固件3的分布;否则
[0094]
替换至少部分平衡用紧固件3,重新执行步骤s4和步骤s5,其中,替换至少部分平衡用紧固件3包括将理论不平衡量pf与设计限定值ps的差值pd与阈值p
t
比较:
[0095]
差值pd小于阈值p
t
,替换坐标系的纵轴y处的平衡用紧固件3;否则替换坐标系的横轴x处的平衡用紧固件3。
[0096]
重新执行的步骤s5计算在经过替换后的平衡用紧固件3的分布下,高压转子4的理论不平衡量pf,并比较理论不平衡量pf与设计限定值ps,理论不平衡量pf小于等于设计限定值ps,则确定经过替换后的平衡用紧固件3的分布;否则
[0097]
重新执行步骤s4和步骤s5,直至在步骤s5中,理论不平衡量pf小于等于设计限定值ps,确定经过替换后的平衡用紧固件3的分布。
[0098]
如图3所示,坐标系的纵轴y与分布圆5的交点可能处于两个相邻的平衡用紧固件3的安装位的中间位置,在这种情况下,“纵轴y处的平衡用紧固件3”的含义是指相邻纵轴y与分布圆5交点的平衡用紧固件3。同理,坐标系的横轴x与分布圆5的交点可能处于两个相邻的平衡用紧固件3的安装位的中间位置,在这种情况下,“横轴x处的平衡用紧固件3”的含义是指相邻横轴x与分布圆5交点的平衡用紧固件3。
[0099]
在本实施例中,理论不平衡量pf的计算及其与设计限定值ps的比较通过计算机软件完成。
[0100]
在本实施例中,设计限定值ps为设计所允许的上限值,理论不平衡量pf小于等于设计限定值ps为确定平衡用紧固件3的判断条件。在另一个或多个实施例中,设计限定值ps通过安全系数表示,由理论不平衡量pf计算得出的系数大于设计限定值ps代表的安全系数,则确定平衡用紧固件3的分布。在又一个或多个实施例中,设计限定值ps采用其他表现形式,理论不平衡量pf与设计限定值ps满足特定关系,则确定平衡用紧固件3的分布。
[0101]
在本实施例中,该计算机可读存储介质存储的指令执行的组合转子平衡方法的平衡对象以高压转子4进行说明并示出,该组合转子平衡方法的平衡对象并不限于高压转子4,在另一个或多个实施例中,在作出适当的适应性调整后,该组合转子平衡方法的平衡对象为由单元体装配得到的其他组合转子。
[0102]
本发明虽然以实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以做出可能的变动和修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1