全向的转速和方向传感器的制作方法
1.本发明涉及一种全向的转速和方向传感器,该全向的转速和方向传感器尤其用于在商用车、尤其是载重汽车中应用。
背景技术:
2.尤其是对于自主驾驶,需要转速传感器,所述转速传感器确定商用车中的确定的部件的转速和旋转方向,所述确定的部件例如是轴、齿轮或者单个的车辆车轮。在此尤其重要的是,不仅测量转速(即旋转速度)、还测量旋转方向。
3.在现有技术中,为此已知所谓的无源传感器,所述无源传感器位置固定地安置在转动对象的附近,该转动对象例如是轴或者齿轮。在无源传感器的情况下,由于技术原因,传感器的径向取向并不重要。
4.在载客汽车的情况下已经存在有源传感器,在所述有源传感器的情况下,传感器的径向取向是重要的。在此,传感器紧固或固定地旋拧在位置上,使得轴或者转动部件始终可以确定精确的旋转方向和旋转速度。
5.然而,在商用车的情况下,需要这样的有源传感器的轴向可移动性,因为存在相应的要求。即,传感器必须是可运动的,并且无论该传感器相对于转动对象占据哪个位置都始终提供相同的测量结果。
6.在现有技术中已知例如专利文件ep 3 304 003 b1,该专利文件公开一种用于执行独立的速度测量和方向测量的磁场传感器。
7.在此,在传感器中包含彼此间隔开的第一、第二和第三磁场测量元件,所述磁场测量元件以与配属于转动对象的磁场的幅度成比例的方式分别输出磁场信号。确定所有三个测量值的差对,并且分别确定相应的差信号,所述差信号以差分通道的形式输出。组合元件基于第一、第二和第三磁场信号产生组合信号。然后,控制电路计算转速并且确定旋转方向,然后产生传感器输出信号,该传感器输出信号显示转动对象的运动速度和运动方向。
8.该传感器可以与转动对象位置无关地设置。
9.在此,尤其使用霍尔传感器,所述霍尔传感器在三个位置上测量来自于转动对象的磁场,并且由此可以通过控制单元计算转速和运动方向。
10.然而,三个差分通道的计算是高开销的,消耗计算时间并且占用存储空间。
技术实现要素:
11.因此,本发明的任务在于,提供一种改进的用于确定转动对象的旋转方向以及转速的磁场传感器,在该磁场传感器的情况下,可以减少计算时间并且提高精度。
12.该任务通过根据权利要求1所述的磁场传感器以及由根据权利要求10和11中任一项所述的由磁场传感器和磁极转子构成的系统以及通过权利要求13所述的方法来解决。
13.其他的有利构型是从属权利要求的主题。
14.根据本发明的磁场传感器包括芯片,该芯片具有至少一个第一、第二和第三磁场
测量元件,所述磁场测量元件分别匹配用于提供第一、第二和第三磁场信号,所述磁场信号的幅度与磁场成比例,该磁场来自于转动对象(或者来自于永磁体并且通过转动对象的运动偏转)。所述至少三个磁场测量元件的法向量线性地彼此独立。这意味着,所述磁场测量元件分别相互围成90
°
的角度,例如直角坐标系。信号检测单元匹配用于确定第一差信号和第二差信号,其中,第一差信号基于第一磁场测量元件的磁场信号与第二磁场测量元件的磁场信号之间的差,第二差信号基于第一磁场测量元件的磁场信号与第三磁场测量元件的磁场信号之间的差。信号检测单元此外匹配用于,基于第一磁场测量元件的磁场信号以及第一差信号以及第二差信号计算和输出组合信号。然后,分析处理单元匹配用于产生输出信号,该输出信号包含转动对象的运动速度和运动方向。
15.优选地,所述至少三个磁场测量元件是霍尔传感器。与别的传感器相比,这样的传感器是相对成本有利的,但是尽管如此是非常准确的。
16.霍尔传感器由掺杂半导体层构成,所述掺杂半导体层在侧面具有例如四个电极。通过两个对置的电极馈入电流,然后,所谓的霍尔电压施加在随后彼此正交的两个电极上。如果垂直于该层延伸的磁场穿流霍尔传感器,则该霍尔传感器输出输出电压,该输出电压与由磁通密度和电流构成的矢量乘积的量值成比例。该霍尔电压的起因是作用到该掺杂半导体层中的运动的电荷载体上的洛伦兹力。
17.在这种情况下,磁场传感器是3d霍尔传感器,在此借助两个差信号工作,因为一个方向上的磁通变化与该布置的方向无关——因为与旋转方向和旋转速度无关地始终产生霍尔电压。方向识别在此基本上通过相位偏移实现,该相位偏移即各个磁场测量元件的幅度的最小值和最大值的差。因此,两个差信号足够用于方向识别。磁通信号在此还可以提供另外的诊断可能性,例如确定磁场传感器与转动对象之间的气隙的厚度。当这在商用车中进行时,变大的气隙可以例如提供如下提示:磁场传感器相对于转动对象的位置已随着时间发生变化,驾驶员因此必须去维修车间。
18.进一步优选地,可以执行矢量分析处理。
19.进一步优选地,三个磁场测量元件的法向量分别相互围成大约90
°
、优选恰好90
°
的角度。通过这样的布置,能够测量全部信号的最大幅度。
20.更进一步优选地,存在有另外的磁场测量元件,所述另外的磁场测量元件例如以45
°
角布置在三个磁场测量元件之间,所述三个磁场测量元件相互围成90
°
的角度。
21.优选地,第一磁场测量元件是横向霍尔传感器,第二和第三磁场测量元件分别是竖直霍尔传感器。竖直霍尔传感器如此布置,使得该竖直霍尔传感器平行于磁通线定位并且平行于芯片的平面延伸。与此相反,两个横向磁场测量元件垂直于磁通线并且也垂直于芯片。
22.这反过来具有如下优点:通过竖直霍尔传感器可以与该布置无关地测量磁通变化——即始终可以测量磁场。即,磁场传感器可以运动远离转动对象,并且尽管如此仍然可以足够准确地测量。进一步优选地,芯片匹配用于布置在大程度上平行于、优选平行于转动对象的切向平面的平面中。由此反过来能够实现:测量信号中的一个测量信号与定向无关,并且在转动对象与芯片之间的变大的间隙的情况下也可能进行准确测量。
23.进一步优选地,芯片和至少三个磁场元件放置在壳体中,并且芯片优选能够借助支架紧固。支架使得具有磁场测量元件的芯片固定地固定在壳体中并且因此是位置固定
的。因此,对磁场传感器校准一次是足够的,并且然后,该磁场传感器可以保持使用,而无需重复地再校准。
24.壳体的内部空间进一步优选地至少部分地填充有塑料材料。这提高磁场传感器在壳体内的位置的稳定性。
25.进一步优选地,在壳体上设置有通量导板(flussleitblech),以便使芯片的区域中的干扰信号最小化。
26.进一步优选地,磁场传感器具有电流接口或者电压接口,借助该电流接口或者电压接口可以输出信号,例如输出给商用车的控制系统。
27.磁场测量元件不一定是霍尔元件,也可以是磁阻元件,例如是各向异性的磁阻元件、巨磁阻或者隧道磁阻。
28.进一步优选地,磁场传感器的分析处理单元设置用于对至少三个磁场测量元件的测量信号进行温度补偿。
29.因此,在不同的温度的情况下获得足够准确的信号,并且可以使旋转速度和转速的温度相关性或测量误差最小化。
30.根据本发明的系统由磁场传感器和磁极转子构成,其中,磁极转子可以是磁编码的或者磁预载的。
31.磁编码在此可以指的是,在磁极转子的齿部上布置有小的永磁体,所述小的永磁体分别产生磁场。
32.磁预载指的是,磁极转子由铁素体材料制成,并且通过在磁场传感器的芯片上设置永磁体产生磁场,该磁场由永磁体激励,根据磁极转子的位置偏转——然后,磁场线延伸到磁极转子的一个或者多个齿部中,但是不延伸到缺口中,然后通过磁极转子的转动偏转。
33.磁极转子的磁场连同来自于芯片上的磁体的磁场一起产生磁场信号,然后该磁场信号可以相应地由磁场传感器测量。
34.进一步优选地,该系统包含另外的差分元件(differentielles element),该另外的差分元件另外匹配用于求取磁极转子的旋转方向。这能够实现更准确且更安全的测量。
35.该另外的差分元件也可以匹配用于求取和/或补偿外部场。
36.根据本发明的用于借助磁场传感器确定转动对象的转速和旋转方向的方法包括下述步骤:
37.a)分别检测第一磁场测量元件的、第二磁场测量元件和第三磁场测量元件的相应的磁场信号;
38.b)由第一磁场测量元件的磁场信号与第二磁场测量元件的磁场信号之间的差求取第一差信号;
39.c)由第一磁场测量元件的磁场信号与第三磁场测量元件的磁场信号之间的差求取第二差信号;
40.d)计算由第一磁场测量元件的磁场信号以及第一差信号以及第二差信号构成的组合信号;
41.e)计算并且输出输出信号,所述输出信号包含转动对象的运动速度和运动方向。
附图说明
42.下面,根据所附附图描述本发明的一种优选实施方式。
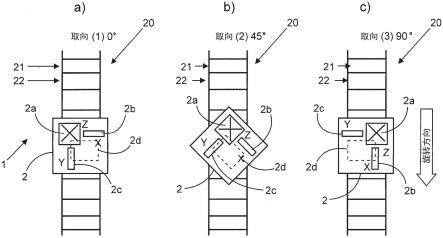
43.图1示出根据本发明的磁场传感器1和磁极转子2在三个不同取向(图1a)至1c))中的俯视图和示意性视图。
44.图2中示出各个磁场测量元件在图1中的三个取向中的每个取向中的典型磁场信号,其中,在此,随着时间、即在磁极转子转动时(图2a)至2c))记录磁场信号的变化过程。
45.图3中示出根据本发明的磁场传感器在壳体中的布置。
具体实施方式
46.在图1中示出根据本发明的磁场传感器1以及磁极转子20。磁场传感器1在俯视图中布置在磁极转子20上方。磁极转子20具有齿部21以及缺口22。磁场传感器包含芯片2,在该芯片上布置有三个磁场测量元件2a、2b和2c。此外,磁体2d布置在该芯片上。磁场测量元件2a、2b和2c基本上长方体形地构型,其具有较大的底面和分别小且窄的侧面。第一磁场测量元件2a作为横向霍尔元件平坦地安置在芯片2上,并且以其大的底面平放在芯片2上。在此,当磁极转子20转动时,始终可以测量霍尔电压。另两个磁场测量元件2b和2c是竖直磁场测量元件,以小的面竖立在芯片上并且因此垂直于芯片布置。芯片2与磁极转子20的切向平面平行。在图1b)中,图1a中的芯片2旋转45
°
,即磁场测量元件2a、2b和2c的位置也发生变化。尽管如此,芯片2仍然位于与磁极转子20的切向平面平行的平面中。在图1c)中,该示意图再次旋转45
°
,在此芯片2也位于与磁极转子20的切向平面平行的平面中。
47.在图2中示出磁场强度的变化过程,即因此传感器2a、2b和2c的信号随着时间的(或在这种情况下:与旋转角度有关的)、并且与芯片2的取向有关的变化过程。图2a)相应于图1a)中的示意图。
48.第二磁场测量元件2b的信号(在图2中绘制为bx)在此具有比第一磁场测量元件2a的信号(在图2中被称为bz)和第三磁场测量元件2c的信号(在图2中被称为by)明显更小的幅度,因为在此通过磁极转子20偏转的磁体2d的磁力线只可以引起第二磁场测量元件2b中的霍尔电压(因为磁场线不垂直于第二磁场测量元件2b的延伸方向)。第一和第三磁场测量元件2a和2c的信号具有较大的幅度,因为在此磁场线垂直于相应的霍尔元件延伸并且因此可以引起较强的霍尔电压。磁场测量元件2a和2c的两个幅度是相位移动的,这可以借助下述内容来解释:这两个元件上的磁场变化以在时间上偏移的方式发生,因为所述两个元件在磁极转子20的旋转方向上彼此间隔开,因此磁极转子的齿部21以时间偏移的方式经过芯片2——因此永磁体2d的磁场线的偏转以相位偏移的方式发生。
49.在图2b)中示出,磁场测量元件2b和2c的信号具有相似的形状,因为在此由永磁体2d创造的、被磁极转子20的转动偏转的磁场的分量分别起作用,所述分量相应地垂直于霍尔元件并且因此可以引起霍尔电压。
50.在图2c)中示出图1c)中的布置中的传感器的测量信号。在此,分别相位偏移地示出第一和第二磁场测量元件2a和2b的信号的强摆幅这能够借助第一和第二磁场测量元件2a和2b在旋转方向上的空间间距来解释。然而,从第三磁场测量元件2c能够看到小摆幅,因为在此只有磁场线的非常小的份额垂直于霍尔传感器进入,因此在第三磁场测量元件2c的延伸方向上不能够产生强霍尔电压。
51.根据所述信号,不仅可以求取旋转速度,还可以求取旋转方向。尤其是相位偏移允许识别旋转方向。两个通道足够用于方向识别,在此不需要三个通道。这节省计算时间,因此可以更快速地提供用于旋转方向和转速的计算的结果。
52.在图3中示出芯片2在壳体5中的布置。芯片2借助支架6紧固在壳体5上。壳体5的内部空间部分地填充有塑料材料。由此,芯片更好地固定在壳体中。还示出壳体相对于磁极转子的位置。具有齿部21和缺口22的磁极转子20与壳体5之间的气隙l可以相应地变化。此外标示出,信号检测单元3、分析处理单元4以及电流接口或者电压接口7位于该芯片上。
53.此外,在芯片2的区域中示出通量导板8,该通量导板应使磁干扰场远离芯片2。
54.本发明不限于所描述的实施方式。重要的是,存在有至少三个霍尔元件,所述霍尔元件的法向量线性地彼此独立。然而,在此之间还可以布置另外的元件,例如与相应的测量元件2a、2b和2c成45
°
角的另外的霍尔元件。这会更进一步提高精度。
55.本发明涉及一种磁场传感器1,该磁场传感器匹配用于确定转动对象20的运动、尤其是该转动对象的旋转方向和转速,该转动对象要么本身产生转动磁场,要么使现有的磁场相应地偏转。为此使用具有至少三个磁场测量元件2a、2b、2c的芯片2,优选使用3d霍尔传感器。这样的磁场传感器1尤其在商用车中使用。
56.附图标记列表
[0057]1ꢀꢀꢀ
磁场传感器
[0058]2ꢀꢀꢀ
芯片
[0059]
2a
ꢀꢀ
第一磁场测量元件
[0060]
2b
ꢀꢀ
第二磁场测量元件
[0061]
2c
ꢀꢀ
第三磁场测量元件
[0062]
2d
ꢀꢀ
永磁体
[0063]3ꢀꢀꢀ
信号检测单元
[0064]4ꢀꢀꢀ
分析处理单元
[0065]5ꢀꢀꢀ
壳体
[0066]6ꢀꢀꢀ
支架
[0067]7ꢀꢀꢀ
电流接口或者电压接口
[0068]8ꢀꢀꢀ
通量导板
[0069]
20
ꢀꢀ
磁极转子
[0070]
21
ꢀꢀ
齿部
[0071]
22
ꢀꢀ
缺口
[0072]
d1
ꢀꢀ
第一差信号
[0073]
d2
ꢀꢀ
第二差信号
[0074]
ks
ꢀꢀ
组合信号
[0075]
as
ꢀꢀ
输出信号
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1