安全壳外观远程图像采集设备的系统参数检定方法及装置
本发明属于数字近景摄影测量、精密工程测量领域,尤其涉及一种安全壳外观远程图像采集设备的系统参数检定方案。
背景技术:
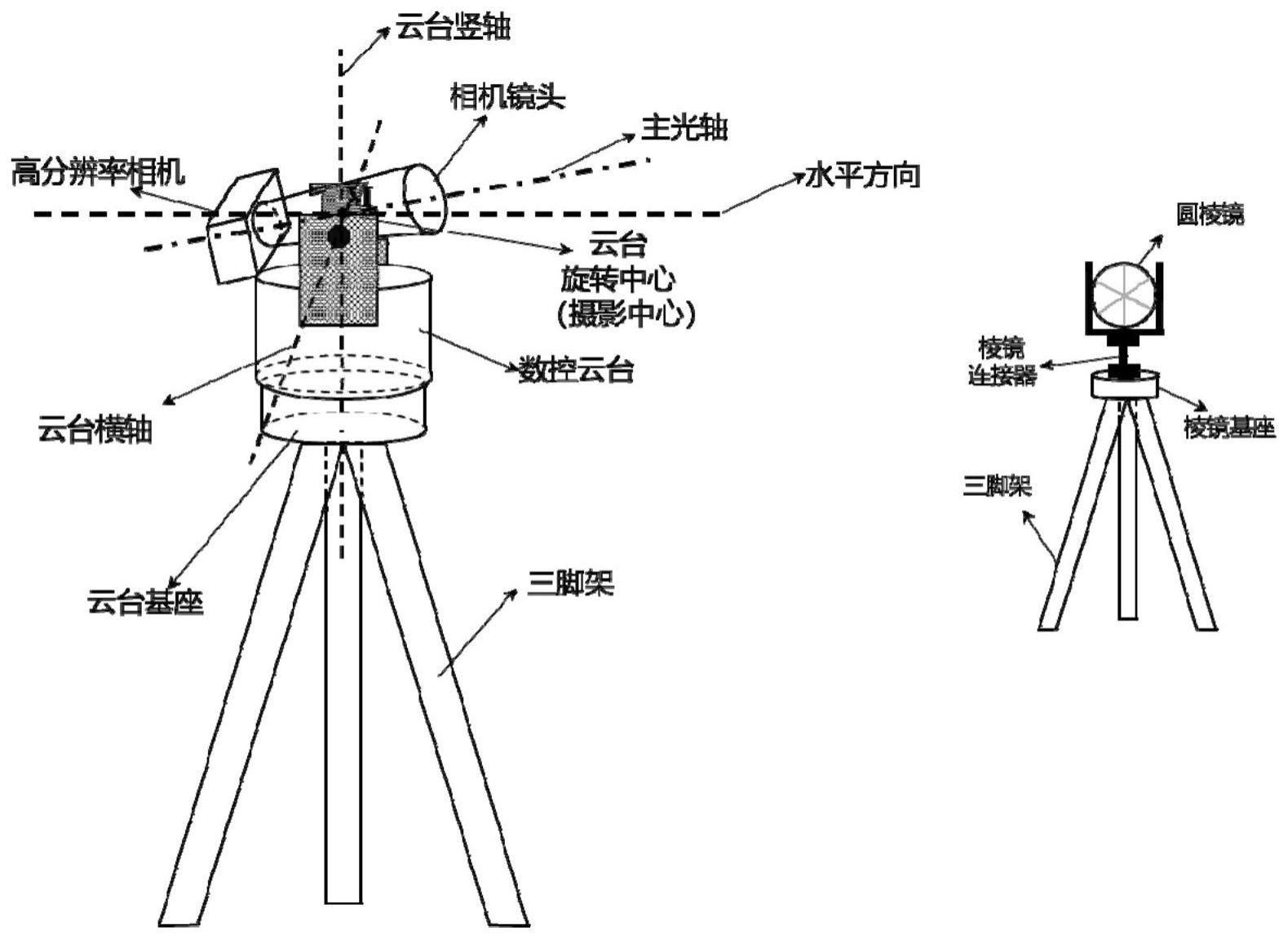
1、安全壳外观远程图像采集设备一般用于核电站安全壳大修期间打压试验前、中、后期对安全壳墙体进行远程图像采集,采集的图像用于对混凝土表面各类缺陷的自动分类、提取。安全壳外观图远程像采集设备通常由各类非专业测量设备组合而成,设备整体不具备测量功能,为完成多测站图像采集需配合使用专门开发的软件系统实现基本测量功能。安全壳外观图像远程采集设备一般由高分辨率相机、数控云台、基座、三脚架、定向棱镜等部分组成。发明人研究团队提出的图像采集设备参见图1,包括:云台基座、三脚架、高分辨率相机、连接板、数控云台、控制终端、定向棱镜、棱镜连接器、棱镜基座。
2、由于这种新提出的安全壳外观远程图像采集设备的各组成部分不具备专业测量功能,各部件需通过加工的连接件组合在一起,进而配合软件控制系统形成一套具备测量功能的设备。主要测量功能体现在:水平方向和竖直方向的旋转、水平方向角度定向、主光轴竖直方向水平位定位等功能。以上功能在设备组装完成后应进行系统参数的检定,各项参数不大于限差要求时才能使用。
3、安全壳外观远程图像采集设备的系统参数检定内容通常包括:图像采集设备对中中心与旋转中心偏差、水平旋转偏差、竖直旋转偏差、目标定向偏差、角度测量内符合精度、角度测量外符合精度、主光轴竖直方向水平位偏差等。
4、相对于专业摄影测量设备,安全壳外观远程图像采集设备系统参数检定的难点及存在的问题主要在于:
5、安全壳外观远程图像采集设备的组成部件一般相对灵活,各部件不具备专业测量功能或只具备某种单一测量功能,各部件组合后的各项相关参数无法直接确定;
6、由于安全壳外观远程图像采集设备属于组合式的测量设备,目前没有现成的检定作业规范对系统参数检定的流程和方法做出规定,需结合实际测量需求、多种测量方法和测量仪器对安全壳外观远程图像采集设备的系统参数进行检定。因此,本技术领域亟待出现科学合理可实践的专用检定技术方案。
技术实现思路
1、本发明提出了一种安全壳外观远程图像采集设备的系统参数检定方案,以解决上述背景技术中存在的难点及问题,系统参数检定结果可作为图像采集设备各部件校正时的数据参考
2、为了实现上述目的,本发明提出一种安全壳外观远程图像采集设备的系统参数检定方法,所述安全壳外观远程图像采集设备由云台基座、三脚架、高分辨率相机、数控云台、控制终端、定向棱镜、棱镜连接器、棱镜基座组成,包括以下步骤:
3、步骤1,图像采集设备对中中心与旋转中心偏差检定;
4、步骤2,图像采集设备竖直方向水平位偏差检定;
5、步骤3,图像采集设备水平旋转偏差检定;
6、步骤4,图像采集设备竖直旋转偏差检定;
7、步骤5,图像采集设备目标定位偏差检定;
8、步骤6,图像采集设备角度测量内符合精度检定;
9、步骤7,图像采集设备角度测量外符合精度检定。
10、而且,所述步骤1实现方式为,室内检校场安置所述图像采集设备及全站仪,布设二维标定板及黑白格测量标志;利用全站仪建立测量坐标系,利用全站仪在一测站上测量若干个黑白格测量标志中心坐标;利用二维标定板按照相机标定流程得到相机畸变参数和相机内方位元素;利用室内检校场内均匀分布的测量标志点,解算所述图像采集设备摄影中心平面坐标,即为图像采集设备旋转中心;利用全站仪测量所述图像采集设备对中中心平面坐标;利用图像采集设备的对中中心平面坐标和摄影中心平面坐标计算偏差。
11、而且,所述步骤2实现方式为,室内检校场内布设1个高程控制点,利用全站仪测出此控制点的高程;安置所述图像采集设备,并利用测量标志点解算摄影中心高程;计算摄影中心与高程控制点的高差,将精密水准尺安置于高程控制点之上,此高差所对应的水准尺上的刻度即为所述图像采集设备的主光轴在竖直方向水平位上照准水准尺后图像中心应对准的位置;利用控制终端控制所述图像采集设备,使拍照的图像中心对准精密水准尺上的相应位置,记录主光轴水平位参数,并计算主光轴水平位偏差。
12、而且,所述步骤3实现方式为,室内检校场内安置所述图像采集设备及水平仪,布设坐标网格板;在水平方向上,利用控制终端控制所述图像采集设备旋转,在旋转起始位和终止位分别拍摄照片,并分别测量旋转起始位图像中心与激光线垂直距离、旋转终止位图像中心与激光线垂直距离;此旋转过程反复多次,统计计算水平旋转偏差。
13、而且,所述步骤4实现方式为,室内检校场内安置所述图像采集设备及水平仪,布设坐标网格板;在竖直方向上,利用控制终端控制所述图像采集设备旋转,在旋转起始位和终止位分别拍摄照片,并分别测量旋转起始位图像中心与激光线垂直距离、旋转终止位图像中心与激光线垂直距离;此旋转过程反复多次,统计计算竖直旋转偏差。
14、而且,所述步骤5实现方式为,
15、在室内控制场安置所述图像采集设备、定向棱镜及全站仪,利用全站仪测量所述图像采集设备设站点坐标及棱镜设站坐标;利用所述图像采集设备多次拍摄定向棱镜图像,且每次拍摄前利用控制终端控制所述图像采集设备在竖直方向和水平方向均旋转小角度;利用控制软件中的目标识别功能对所有图像的定向棱镜中心进行定位,统计计算目标定位偏差。
16、而且,所述步骤6实现方式为,
17、在室内控制场安置所述图像采集设备、布设坐标网格板;在水平方向上,利用控制终端控制所述图像采集设备在旋转起始位和旋转终止位之间旋转多轮,统计各张图像上图像中心位置变化,计算角度测量内符合精度。
18、而且,所述步骤7实现方式为,在室内控制场安置所述图像采集设备、2套定向棱镜及全站仪,利用全站仪测量所述图像采集设备设站点坐标及各定向棱镜设站坐标,并计算各设站组成的水平角作为角度真值;利用控制终端控制所述图像采集设备以其中1个定向棱镜为起始目标进行定向,再旋转至另一定向棱镜处进行定向,记录整个旋转过程水平角旋转数值,此旋转过程需反复多轮;利用多次测量角度值与角度真值进行对比,计算所述图像采集设备角度测量外符合精度。
19、另一方面,本发明提供一种安全壳外观远程图像采集设备的系统参数检定装置,包括可读存储介质,所述可读存储介质上存储有计算机程序,所述计算机程序执行时,实现如上所述的一种安全壳外观远程图像采集设备的系统参数检定方法。
20、另一方面,本发明提供一种安全壳外观远程图像采集设备的系统参数检定装置,包括处理器和存储器,存储器用于存储程序指令,处理器用于调用存储器中的存储指令执行如上所述的一种安全壳外观远程图像采集设备的系统参数检定方法。
21、本发明提出的一种安全壳外观远程图像采集设备的系统参数检定方案,有益效果在于:解决了没有规范流程测定安全壳外观远程图像采集设备各组成部件测量精度的问题;并且为安全壳外观远程图像采集设备设计了各组成部件的精度检定方法。本发明技术方案适用于各类由高分辨率相机、数控云台、定向棱镜及相应连接组件组成的图像采集设备的系统参数检定,特别适合应用于核电站安全壳外观高精度图像采集任务中远程图像采集设备的系统参数检定。
22、本发明方案实施简单方便,实用性强,解决了相关技术存在的实用性低及实际应用不便的问题,能够提高用户体验,具有重要的市场价值。
- 还没有人留言评论。精彩留言会获得点赞!