一种基于FPGA和DSP的惯性器件仿真控制系统的制作方法
一种基于fpga和dsp的惯性器件仿真控制系统
技术领域
1.本发明属于惯性测试仿真系统控制领域,特别是涉及一种基于fpga和dsp的惯性器件仿真控制系统。
背景技术:
2.伴随着现代的光学陀螺仪、振动陀螺仪、微机电陀螺仪和加速度等惯性器件的性能提升和制造成本的降低,惯性器件的使用范围和领域得到进一步扩展。目前,由惯性器件设计制造的惯性导航系统、惯性测量系统等已经广泛应用于太空试验平台、飞行器导航、船舶导航、导弹制导、大地测量、无人驾驶等领域。
3.由于惯性器件存在零漂,其精度会随着使用的时间和温度变化而变化,因此,惯性器件需要用到惯性测试仿真系统对其进行标定和校准,惯性测试仿真系统的控制精度就直接影响到了惯性器件的标定和校准精度,最终影响到惯性系统的精度。
4.目前市场上的惯性测试仿真系统大都采用pc上位机+rt实时操作系统的组合方式,通过pci板卡进行控制,其成本高、体积大、工程实现方式和拆装相对复杂。
技术实现要素:
5.本发明的目的在于提供一种基于fpga和dsp的惯性器件仿真控制系统,该控制系统采用hmi作为人机交互界面,通过组态编程实现,设计简单,成本低、体积小、界面维护方便,解决了通过pci板卡进行控制,其成本高、体积大、工程实现方式和拆装相对复杂的问题。
6.为解决上述技术问题,本发明是通过以下技术方案实现的:
7.本发明为一种基于fpga和dsp的惯性器件仿真控制系统,包括硬件部分和与之配套的软件部分;
8.其硬件部分包括:hmi上位机、dsp芯片、ddr寄存器、flash寄存器1、fpga芯片、flash寄存器2、差分接口芯片、角度传感器、rs232串口芯片、da转换芯片、驱动器、电机;
9.其软件部分包括:hmi上位机应用程序模块、dsp数据读取模块、dsp数据处理模块、dsp数据传输模块、fpga传感器数据采集模块。
10.进一步地,所述hmi上位机与dsp芯片之间通过rs232串口进行连接,所述dsp芯片的型号为tms320f28377sptp,dsp芯片内部集成了dsp数据读取模块、dsp数据处理模块、dsp数据传输模块。
11.进一步地,所述ddr寄存器采用is61lv25616-8ti型sram芯片,所述ddr寄存器与dsp芯片之间双向连接;
12.所述flash寄存器1采用sst39vf800-70-4i-ek型flash芯片,该寄存器与dsp芯片之间双向连接。
13.进一步地,所述fpga芯片采用spartan-3e系列芯片xc3s500e-4pq208i,该芯片与dsp芯片之间通过数据总线、地址总线、控制总线进行连接;
14.所述flash寄存器2选用flash xcf04s作为fpga的配置芯片。
15.进一步地,所述差分接口芯片采用sn65hvd78d型接口芯片,该芯片与fpga芯片之间通过串口连接;
16.所述角度传感器选用型号为ecn225的旋转编码器。
17.进一步地,所述rs232串口芯片选用rsm232d型双路隔离rs232收发器,该芯片与dsp芯片之间通过串口uart连接;
18.所述da转换芯片选用ad5754r型多通道电压输出数模转换器,该芯片与dsp芯片之间通过spi连接。
19.进一步地,所述驱动器选用isf5ak60型直流电机驱动器,所述驱动器与da转换芯片通过电压模拟量信号连接;
20.所述电机选用160lyx15型直流有刷力矩电机,所述电机与驱动器通过电流模拟量信号连接。
21.本发明具有以下有益效果:
22.1、该控制系统采用hmi作为人机交互界面,通过组态编程实现,设计简单,成本低、体积小、界面维护方便。
23.2、该控制系统采用dsp作为控制中心,fpga用于数据采集,其成本低,体积小,设计时可以集成到一块电路板上,使控制系统的控制箱体积设计得结构简单紧凑,从而拆卸方便,便于维护和推广应用。
24.3、该控制系统中的dsp控制程序采用嵌入式c语言实现,fpga采集程序通过verilog hdl语言实现,编程、调试方便,设计时间短。
25.4、该控制系统可靠性高,抛弃了传统的pc上位机+rt实时操作系统的组合方式,传统控制方式下,存在操作系统死机、rt软件与操作系统不兼容的问题,可靠性较低。
26.当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
27.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
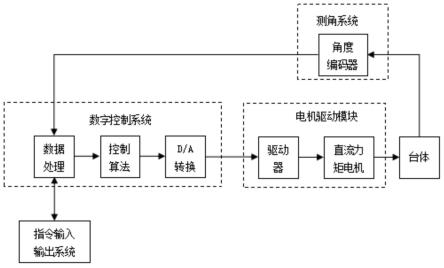
28.图1为本发明的系统控制框图;
29.图2为本发明的系统电气原理图;
30.图3为本发明的双闭环控制框图。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
32.请参阅图1-3所示,本发明为一种基于fpga和dsp的惯性器件仿真控制系统,包括
硬件部分和与之配套的软件部分;
33.其硬件部分包括:hmi上位机、dsp芯片、ddr寄存器、flash寄存器1、fpga芯片、flash寄存器2、差分接口芯片、角度传感器、rs232串口芯片、da转换芯片、驱动器、电机;
34.其软件部分包括:hmi上位机应用程序模块、dsp数据读取模块、dsp数据处理模块、dsp数据传输模块、fpga传感器数据采集模块。
35.其中,hmi上位机与dsp芯片之间通过rs232串口进行连接,hmi上位机同hmi上位机应用程序模块共同完成数据显示以及人机交互操作;dsp芯片的型号为tms320f28377sptp,dsp芯片内部集成了dsp数据读取模块、dsp数据处理模块、dsp数据传输模块,结合上述系统中的各软件模块,该芯片可以实现系统传感器数据采集、数据运算处理、控制信号输出、数据结果显示功能,是整个系统的核心。
36.其中,ddr寄存器选用is61lv25616-8ti型sram芯片,ddr寄存器与dsp芯片之间双向连接,用于存储dsp运算过程中的中间数据;
37.flash寄存器1选用sst39vf800-70-4i-ek型flash芯片,该寄存器与dsp芯片之间双向连接,用于存储dsp的初始运行程序。
38.其中,fpga芯片采用spartan-3e系列芯片xc3s500e-4pq208i,该芯片与dsp芯片之间通过数据总线、地址总线、控制总线进行连接,fpga芯片结合差分接口芯片、fpga传感器数据采集模块用于实现外部角度传感器的数据采集;
39.flash寄存器2选用flash xcf04s作为fpga的配置芯片,flash寄存器2与fpga芯片之间双向连接,用于存放程序和数据。
40.其中,差分接口芯片采用sn65hvd78d型接口芯片,该芯片与fpga芯片之间通过串口连接,用于fpga读取角度传感器的当前角度;
41.角度传感器选用型号为ecn225的旋转编码器,用于感知当前系统角度位置。
42.其中,rs232串口芯片选用rsm232d型双路隔离rs232收发器,该芯片与dsp芯片之间通过串口uart连接,用于dsp与hmi之间的数据传输;
43.da转换芯片选用ad5754r型多通道电压输出数模转换器,该芯片与dsp芯片之间通过spi连接,用于dsp向驱动器发送控制指令。
44.其中,驱动器选用isf5ak60型直流电机驱动器,驱动器与da转换芯片通过电压模拟量信号连接,用于接收dsp发送的控制指令;
45.电机选用160lyx15型直流有刷力矩电机,电机与驱动器通过电流模拟量信号连接,用于执行驱动器控制指令。
46.其中,hmi上位机应用程序模块用于提供人机交互功能;其软件编程部分分为发送进程、接收进程和显示进程;发送进程获取屏幕上输入的控制指令信息,并按照通信协议下传给dsp数据传输模块;接收进程通过通信协议接收dsp数据传输模块上传的系统数据;显示进程显示接收进程获取的系统数据和响应应用程序上的屏幕操作;
47.dsp数据读取模块用于读取fpga中的角度传感器数据信息,并存放到sram中,当满足一定条件时,dsp数据处理模块调用此数据进行数据解算;dsp数据处理模块根据屏幕上输入的控制指令信息和采集到的当前角度信息进行pid解算,得出控制指令,通过da芯片传送给驱动器;
48.dsp数据传输模块一是用于接收屏幕上输入的控制指令信息;二是用于将传感器
数据、计算结果实时上传到hmi进行显示;
49.fpga传感器数据采集模块通过通信协议实时采集角度传感器的当前角度信息,并上传给dsp数据读取模块。
50.本发明的工作原理为:
51.控制系统硬件由一个控制柜组成,按功能模块细分为测角系统模块、数字控制系统模块、电机驱动模块、指令输入输出系统及与外部通信接口系统模块等组成,如图1所示。
52.1.测角系统
53.测角系统是转台角位置的测量装置,主要由角度传感器组成。对轴的角位置进行测量,并且输出实时测量数据,作为控制系统的反馈参数。
54.2.指令输入输出系统
55.指令输入输出系统由hmi组成,与数字控制系统中的dsp芯片之间通过rs232串口进行连接,hmi主要用于完成目标控制指令输入(目标位置、目标速率)和运算结果显示。
56.3.数字控制系统
57.数字控制系统主要由dsp芯片、ddr寄存器、flash寄存器1、fpga芯片、flash寄存器2、差分接口芯片、角度传感器、rs232串口芯片、da转换芯片等组成,其集成在一块电路板上,体积小,成本低,安装、维护方便。
58.控制上采用了数字pid调节算法,pid(比例-积分-微分)调节是控制系统中技术成熟,应用广泛的一种控制技术,因此被广泛地应用于各种控制系统中。它的特点是形成了典型的结构,参数整定及调节方便,结构改变灵活,适应性强。
59.pid调节器的数学模型为:
[0060][0061]
其中的kp、ki、kd分别为比例,积分和微分系数。
[0062]
在控制算法中采用位置式算式,e(t)由采样点的值代替,积分与微分由数值积分与差分算法来实现,采用后向矩形积分与后向差分,所得到的位置算式为:
[0063][0064]
为了减小系统的超调量,对以上算式进行改造,采用积分分离的pid算法。此算法引入逻辑功能,调节器输出采样点值为:
[0065][0066]
式中
[0067][0068]
其中,a为门限,大偏差时,积分项不起作用,偏差在门限之内时,引入积分算法,这样既可以减少超调量,又可以使积分控制达到预期的效果。
[0069]
本控制系统采用双闭环(位置环和速度环)数字pid控制,其结构图如图3所示。在这个系统框图中,位置环控制器、速率环控制器均由dsp来实现。
[0070]
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0071]
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制本发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1