一种无人车控制系统、无人车及无人车控制方法与流程
本技术涉及无人驾驶,具体地涉及一种无人车控制系统、无人车及无人车控制方法。
背景技术:
1、随着人工智能技术的发展,众多汽车企业、互联网企业研究无人车的积极性高涨。无人车是指具有自主行为能力并完全省略人类驾驶机构的车辆,具有智能化、线控化、机器人化、多功能化的特点。无人车能够替代人类执行作业任务,包括但不限于巡逻、侦察、物流、运输、摆渡、配送、清扫等民用或军用任务,具有非常广阔的应用前景,是未来智能交通与智慧城市建设的重要组成部分,对我国国民经济发展与国防安全建设具有重要战略意义。
2、现有技术中,无人车通常具有两种模式即为智能驾驶模式,及人工驾驶模式。在智能驾驶模式时,通过感知传感器对道路周边环境信息进行采集,其中,感知传感器包括摄像头、激光雷达、毫米波雷达和超声波等,采集的数据传输出到车辆的智能驾驶控制器进行计算,从而识别车辆周边障碍物和可行驶区域,进行路线规划和控制,最后制定方向盘转角和速度等信息,传输到车辆的底盘执行机构,底盘执行机构按照指令进行精确执行。这样一来,无人车可以实现自动驾驶。
3、目前,无人车在智能驾驶模式时主要应用于较好的行驶道路路况和无人配送物流车的小区路况。对于其他更为复杂的路况,比如非铺装道路、坏路路况等,现有智能驾驶技术无法针对上述较为复杂路况进行路线调整,导致无人车会返回或者重新规划其他路线,会消耗较高的时间成本。并且,这些复杂路况还可能会对无人巡逻车、最后一公里物流车、特殊无人作业车等无人车造成无法返回、损坏等问题,会增加使用者对车辆的维护成本。
技术实现思路
1、有鉴于此,本技术提供一种无人车控制系统、无人车及无人车控制方法,以利于解决现有技术中智能驾驶技术无法针对复杂路况进行路线调整,导致无人车会返回或者重新规划路线的问题。
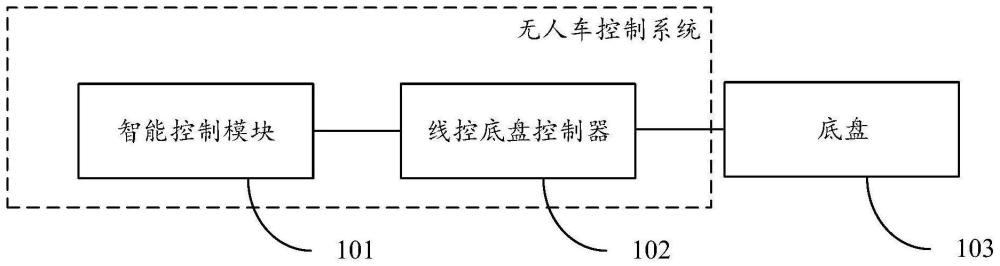
2、第一方面,本技术实施例提供了一种无人车控制系统,包括:
3、智能控制模块及线控底盘控制器;其中,所述智能控制模块与所述线控底盘控制器连接;所述线控底盘控制器与无人车内的底盘连接;
4、所述智能控制模块,用于接收遥控设备发送的遥控控制请求消息,根据所述遥控控制请求消息生成线控请求消息,向所述线控底盘控制器发送线控请求消息;
5、所述线控底盘控制器,用于响应于线控请求消息,切换为线控状态;
6、所述智能控制模块,还用于在接收到遥控设备发送的无人车控制操作数据信息时,根据所述无人车控制操作数据信息生成无人车的运行指令,将所述运行指令发送至所述线控底盘控制器;
7、所述线控底盘控制器,还用于根据所述运行指令控制所述无人车的底盘运行。
8、优选地,所述智能控制模块,还用于根据所述遥控控制请求消息向所述线控底盘控制器发送使能信号;
9、所述线控底盘控制器,还用于响应于所述使能信号,进入工作状态。
10、优选地,所述智能控制模块包括:传输模块,车身控制器及智能驾驶控制器;所述传输模块与所述车身控制器及智能驾驶控制器连接;所述车身控制器与所述智能驾驶控制器及线控底盘控制器连接;所述智能驾驶控制器与所述线控底盘控制器连接;
11、所述传输模块,用于接收遥控设备发送的遥控控制请求消息,并向所述车身控制器发送所述遥控控制请求消息;
12、所述车身控制器,用于根据所述遥控控制请求消息,向所述线控底盘控制器发送使能信号,并向所述智能驾驶控制器发送所述遥控控制请求消息;
13、所述智能驾驶控制器,用于接收所述遥控控制请求消息,根据所述遥控控制请求消息生成线控请求消息,并向所述线控底盘控制器发送所述线控请求消息。
14、优选地,所述传输模块,还用于在接收到无人车控制操作数据信息时,向所述智能驾驶控制器发送所述无人车控制操作数据信息;
15、所述智能驾驶控制器,还用于接收所述无人车控制操作数据信息,并根据所述无人车控制操作数据信息生成无人车的运行指令,向所述线控底盘控制器发送所述运行指令。
16、优选地,所述车身控制器,用于根据所述遥控控制请求消息,检测无人车当前驾驶模式的优先级是否高于所述遥控驾驶模式的优先级;
17、若无人车当前驾驶模式的优先级低于所述遥控驾驶模式的优先级,向所述线控底盘控制器发送使能信号,并向所述智能驾驶控制器发送所述遥控控制请求消息。
18、优选地,所述传输模块与所述车身控制器通过第一总线连接,所述车身控制器与所述智能驾驶控制器通过第一总线连接;所述传输模块通过第二总线与所述智能驾驶控制器连接;所述第一总线的数据传输率低于第一阈值;所述第二总线的数据传输率低于第二阈值;所述第二阈值高于第一阈值。
19、优选地,所述线控底盘控制器,还用于向所述智能驾驶控制器发送线控响应消息;
20、所述智能驾驶控制器,还用于接收所述线控响应消息,并根据所述线控响应消息生成遥控控制响应消息;通过第一总线经所述车身控制器向所述传输模块发送所述遥控控制响应消息,并通过所述第二总线向所述传输模块发送所述遥控控制响应消息;
21、所述传输模块,还用于在通过第一总线接收到所述遥控控制响应消息,且通过所述第二总线接收到所述遥控控制响应消息时,根据所述遥控控制响应消息生成无人车操作请求消息,向所述遥控设备发送所述无人车操作请求消息。
22、优选地,所述线控底盘控制器,还用于向所述智能驾驶控制器发送运行指令的响应信息;
23、所述智能驾驶控制器,还用于接收所述运行指令的响应信息,根据所述运行指令的响应信息生成无人车的运行响应消息;通过第一总线经所述车身控制器向所述传输模块发送所述无人车的运行响应消息,并通过所述第二总线向所述传输模块发送所述无人车的运行响应消息;
24、所述传输模块,还用于接收所述无人车的运行响应消息,并向所述遥控设备发送所述无人车的运行响应消息。
25、优选地,所述智能驾驶控制器,用于获取外围环境信息及无人车的可视化数据信息;根据所述外围环境信息、无人车的可视化数据信息及所述运行指令的响应信息,生成运行响应消息。
26、优选地,所述传输模块,还用于接收所述遥控设备发送的遥控控制停止消息;通过所述第一总线向所述车身控制器发送所述遥控控制停止消息,并通过所述第二总线向所述智能驾驶控制器发送所述遥控控制停止消息;
27、所述车身控制器,还用于通过所述第一总线接收所述遥控控制停止消息,并通过所述第一总线向所述智能驾驶控制器发送所述遥控控制停止消息;
28、所述智能驾驶控制器,还用于在通过所述第一总线接收到所述遥控控制停止消息,且通过所述第二总线接收到所述遥控控制停止消息时,生成停止线控请求消息;向所述线控底盘控制器发送所述停止线控请求消息;
29、所述线控底盘控制器,还用于接收所述停止线控请求消息,并生成退出线控状态的响应消息;向所述智能驾驶控制器发送退出线控状态的响应消息;
30、所述智能驾驶控制器,还用于接收所述退出线控状态的响应消息,并根据所述退出线控状态的响应消息生成遥控控制停止响应消息;通过所述第一总线经所述车身控制器向所述传输模块发送所述遥控控制停止响应消息,并通过所述第二总线向所述传输模块发送所述遥控控制停止响应消息;
31、所述传输模块,还用于在通过第一总线接收到所述遥控控制停止响应消息,且通过所述第二总线接收到遥控控制停止响应消息时,向所述遥控设备发送所述遥控控制停止响应消息。
32、优选地,所述车身控制器,还用于通过第一总线接收所述遥控控制停止响应消息,向所述线控底盘控制器发送退出线控使能消息;
33、所述线控底盘控制器,还用于响应于所述退出线控使能消息,退出使能状态。
34、优选地,所述智能驾驶控制器,用于在通过所述第一总线接收到所述遥控控制停止消息,且通过所述第二总线接收到所述遥控控制停止消息时,检测所述无人车是否满足第一预设停止线控条件,若满足则生成停止线控请求消息;向所述线控底盘控制器发送所述停止线控请求消息;
35、所述线控底盘控制器,用于接收所述停止线控请求消息,检测所述无人车的底盘是否满足第二预设停止线控条件,若满足则生成退出线控状态的响应消息;向所述智能驾驶控制器发送退出线控状态的响应消息。
36、优选地,所述智能驾驶控制器,用于接收所述遥控控制请求消息,检测所述线控底盘控制器是否满足第一预设线控条件,若满足则根据所述遥控控制请求消息生成线控请求消息,并向所述线控底盘控制器发送所述线控请求消息;
37、所述线控底盘控制器,用于接收所述线控请求消息,检测是否满足第二预设线控条件,若满足则切换为线控状态。
38、优选地,所述传输模块,用于向所述车身控制器发送身份验证请求消息;接收所述车身控制器返回的身份验证响应消息,根据所述身份验证响应消息确定验证是否通过,并在验证通过时向所述车身控制器发送所述遥控控制请求消息。
39、优选地,所述传输模块,还用于接收遥控设备发送的启动请求消息,并向所述车身控制器发送身份验证请求消息;
40、所述车身控制器,还用于接收所述身份验证请求消息,根据所述身份验证请求消息生成所述身份验证响应消息,并发送至所述传输模块;
41、所述传输模块,还用于接收所述车身控制器返回的身份验证响应消息,根据所述身份验证响应消息确定验证是否通过,并在验证通过时向所述车身控制器发送所述启动请求消息;
42、所述车身控制器,还用于接收所述启动请求消息,控制所述无人车上电并启动;
43、所述智能驾驶控制器,还用于启动时生成验证数据信息,向所述车身控制器发送所述验证数据信息;
44、所述车身控制器,还用于接收所述智能驾驶控制器发送的验证数据信息,并根据所述验证数据信息生成验证数据响应信息,向所述智能驾驶控制器发送所述验证数据响应信息;
45、所述智能驾驶控制器,还用于接收所述验证数据响应信息,检测所述验证数据响应信息是否正确,若正确则解除防盗状态,并向所述车身控制器发送解除防盗状态的消息;
46、所述车身控制器,还用于接收所述解除防盗状态的消息,根据所述解除防盗状态的消息生成启动成功消息,向所述传输模块发送启动成功消息;
47、所述传输模块,还用于向所述遥控设备发送所述启动成功消息。
48、优选地,所述传输模块包括:远距离传输模块或者近距离传输模块。
49、优选地,所述当前驾驶模式包括人工驾驶模式、遥控驾驶模式及智能驾驶模式中的一种;
50、所述人工驾驶模式的优先级大于所述遥控驾驶模式的优先级,所述遥控驾驶模式的优先级大于智能驾驶模式的优先级。
51、优选地,在所述传输模块包括:远距离传输模块或者近距离传输模块时,所述遥控驾驶模式包括移动控制驾驶模式及遥控控制驾驶模式;
52、所述遥控控制驾驶模式的优先级大于所述移动控制驾驶模式的优先级。
53、第二方面,本技术实施例提供了一种无人车,包括:底盘及上述第一方面任一项所述的无人车控制系统;
54、所述无人车控制系统中的线控底盘控制器与所述底盘连接。
55、优选地,所述无人车的驾驶模式包括人工驾驶模式、遥控驾驶模式及智能驾驶模式;
56、所述人工驾驶模式的优先级大于所述遥控驾驶模式的优先级,所述遥控驾驶模式的优先级大于智能驾驶模式的优先级。
57、优选地,所述遥控驾驶模式包括移动控制驾驶模式及遥控控制驾驶模式;
58、所述遥控控制驾驶模式的优先级大于所述移动控制驾驶模式的优先级。
59、第三方面,本技术实施例提供了一种无人车控制方法,应用于上述第一方面任一项所述的无人车控制系统,所述方法包括:
60、接收遥控设备发送的遥控控制请求消息,并根据遥控控制请求消息,生成线控请求消息;
61、根据所述线控请求消息,切换为线控状态;
62、接收遥控设备发送的无人车控制操作数据信息,并根据所述无人车控制操作数据信息生成运行指令;
63、根据所述运行指令控制所述无人车的底盘运行。
64、优选地,还包括:
65、根据遥控控制请求消息,生成线控使能信号;
66、所述根据所述线控请求消息,切换为线控状态包括:
67、根据所述线控请求消息及所述线控使能信号,切换为线控状态。
68、优选地,所述根据遥控控制请求消息,生成线控使能信号包括:
69、根据所述遥控控制请求消息,检测无人车当前驾驶模式的优先级是否高于所述遥控驾驶模式的优先级;
70、若无人车当前驾驶模式的优先级低于所述遥控驾驶模式的优先级,则生成线控使能信号。
71、采用本技术实施例所提供的方案,所述无人车控制系统包括:智能控制模块及线控底盘控制器;其中,智能控制模块与线控底盘控制器连接;线控底盘控制器与无人车内的底盘连接。智能控制模块,用于接收遥控设备发送的遥控控制请求消息,根据遥控控制请求消息生成线控请求消息,向线控底盘控制器发送线控请求消息。线控底盘控制器,用于响应于线控请求消息,切换为线控状态。智能控制模块,还用于在接收到遥控设备发送的无人车控制操作数据信息时,根据无人车控制操作数据信息生成无人车的运行指令,将运行指令发送至线控底盘控制器。线控底盘控制器,还用于根据运行指令控制无人车的底盘运行。也就是说,在面对复杂路况时,可以由驾驶员对无人车进行遥控控制,此时,驾驶员可以通过遥控设备向无人车发送遥控控制请求消息,无人车控制系统中的智能控制模块可以在接收到遥控设备发送的遥控控制请求消息时,向线控底盘控制器发送线控请求消息。线控底盘控制器在接收到线控请求消息时,切换为线控状态。智能控制模块在接收到遥控设备发送的无人车控制操作数据信息时,可以根据无人车控制操作数据信息生成无人车的运行指令,并将运行指令发送至线控底盘控制器。线控底盘控制器在接收到运行指令之后,根据运行指令控制无人车的底盘运行。这样一来,通过无人车控制系统可以对无人车进行远程遥控,使得无人车可运行于更多的复杂路况,并且可以应用于更多工作场景。
- 还没有人留言评论。精彩留言会获得点赞!