一种多无人机协同干扰方法
1.本技术涉及无人机领域,具体而言,涉及一种模糊自适应nmpc轨迹跟踪控制和能源管理方法。
背景技术:
2.多无人机协同干扰是指两架或两架以上无人机相互配合、协作执行干扰任务的策略(参见文献:franklin m.unmanned combat air vehicles:opportunities for the guided weapons industry?.[j].rusi occasional paper,2009.)。
[0003]
在现代战争中,地面雷达往往部署在敌纵深作战区域,有人机载平台或车载平台难以进入,无法对其形成有效的干扰。无人机具有低成本、高机动性和无人员伤亡等优点,能更好地对敌方地面雷达进行干扰,因此,为完成此类作战任务,往往采用多无人机协同干扰的方式进行。多无人机执行协同干扰任务时,需要进行干扰点聚类与多无人机协同干扰任务分配,然后携带干扰载荷的无人机对干扰点进行抵近干扰。
[0004]
现有的多无人机协同干扰方法存在以下两个主要问题:
[0005]
1)多无人机之间的航迹交叉问题。在传统的多无人机协同干扰算法中,无人机群需要对多个干扰点进行抵近干扰,规划出来的航迹可能会出现重合的情况,多无人机在执行任务的过程中存在较大的碰撞风险。
[0006]
2)传统的多无人机协同干扰算法较为复杂,效率较低。现有的多无人机协同干扰算法一般要着重考虑多无人机生成的假目标航迹的可信度,导致算法的复杂度较高,无法满足无人机实时规划干扰航迹的需求。
[0007]
综合以上分析,如何解决以上两个问题,仍然需要深入的研究。
技术实现要素:
[0008]
本技术的目的在于针对上述现有技术的不足,提供一种多无人机协同干扰方法。
[0009]
本发明的目的在于提供一种时效性较高的多无人机协同干扰方法。通过聚类算法对地面雷达目标进行聚类,得到按照地面雷达位置聚类的簇,然后进行多无人机协同干扰任务分配,任务分配结束后,基于蚁群算法对协同干扰航迹进行优化,生成多机协同干扰航迹。
[0010]
本技术的技术方案如下:
[0011]
一种多无人机协同干扰方法,包括如下步骤:
[0012]
步骤1:参数初始化;
[0013]
步骤2:目标干扰点聚类;
[0014]
步骤3:多无人机干扰任务分配;
[0015]
步骤4:基于蚁群算法对协同干扰航迹进行优化,生成多机协同干扰航迹。
[0016]
进一步,步骤1包括如下子步骤:
[0017]
步骤1.1输入地面雷达的数量n与位置信息;
[0018]
步骤1.2输入携带干扰载荷的无人机数量m;无人机搭载干扰载荷的扫描角度θ;干扰载荷的最大有效距离r
max
;
[0019]
步骤1.3设定无人机搭载的干扰载荷的探测范围:干扰载荷的最大地面视场为一个半径为r
max sinθ的圆。
[0020]
进一步,步骤2:雷达聚类:
[0021]
判断无人机数量m与地面雷达数量n的关系:
[0022]
若m≥n,则每个雷达都分别属于一个簇,雷达簇的数量k=n;
[0023]
若m<n,运用聚类算法对地面雷达进行聚类,得到k个聚类簇,通过调整eps邻域半径,使得k≤m;
[0024]
进一步,步骤2,包括以下子步骤:
[0025]
2.1输入干扰点集合d={x1,x2,...,xm}、邻域参数minpts(minpts为邻近区域内应至少包含点的个数,minpts∈[2,+∞))
[0026]
xi表示第i个无人机的位置;
[0027]
2.2初始化核心对象集合:
[0028]
ω表示核心对象集合,表示空集;
[0029]
2.3循环计算
[0030]
2.3.1j初始值为1;
[0031]
2.3.2确定干扰点xj的邻域n
eps
(xi):
[0032]neps
(xi)={xj∈d|dist(xi,xj)≤eps}
[0033]
其中,d={x1,x2,...,xm}为给定数据集,n
eps
为点xi的eps邻域包含的干扰目标点的点集;
[0034]
2.3.3若将|n
eps
(xi)|≥minpts干扰点xj加入核心对象集合:ω=ω∪{xj}
[0035]
2.3.4j的值加1;
[0036]
2.3.5若j大于m,退出循环,进入步骤2.4;若j小于等于m,重复步骤2.3.2~2.3.5。
[0037]
2.4初始化干扰点簇类:k=0;初始化未访问干扰点集合:γ=d;
[0038]
2.5第一重循环
[0039]
2.5.1记录当前未访问干扰点集合:γ
old
=γ
[0040]
2.5.2随机选取一个核心对象o∈ω,初始化队列q=<o>;(这里定义了q,相当于一个临时的核心对象集合)
[0041]
2.5.3γ=γ\{o};
[0042]
2.5.4第二重循环
[0043]
2.5.4.1取出队列q中的首个样本q(q为一个临时的核心对象集合)
[0044]
2.5.4.2若|n
eps
(q)|≥minpts,令δ=n
eps
(xi)∩γ,将δ中的干扰点加入队列q,γ=γ\δ;
[0045]
2.5.4.3若重复步骤2.5.4.1~2.5.4.3;否则,进入步骤2.5.5(即是执行第二重循环的判断条件);
[0046]
2.5.5k自加1,生成聚类簇ck=γ
old
\γ,ω重新赋值为ω\ck;
[0047]
2.5.6若重复步骤2.5.1~2.5.6;否则,进入步骤2.6;
[0048]
2.6输出:簇划分c={c1,c2,...,ck};后续要对簇进行任务分配。
[0049]
进一步,步骤3:进行多无人机干扰任务分配;包括以下子步骤:
[0050]
3.1每个雷达簇至少安排一架无人机进行干扰。
[0051]
3.2计算每个雷达簇中所需要的最短干扰航迹l,若无人机的最大航程l<l,则对该雷达簇再进行聚类,直到l≥l。
[0052]
进一步,步骤4还包括:
[0053]
4.1初始化蚁群参数:
[0054]
输入参数:p、t、d
ij
、τ
ij
(t)、τ0、最大迭代次数n;
[0055]
其中,蚁群中蚂蚁的数量为p,目标点的数量为t,点i与点j之间的距离为d
ij
,t时刻点i与点j连接路径上的信息素浓度为τ
ij
(t);初始时刻,各个目标点连接路径上的信息素浓度相同,设为τi(t0)=τ0;
[0056]
4.2循环求解
[0057]
4.2.1迭代次数i初始为0;
[0058]
4.2.2构建解空间:
[0059]
蚂蚁k根据各个目标点之间连接路径上的信息素浓度决定其下一个访问节点,设表示t时刻无人机从点i转移到点j的概率,其计算公式为:
[0060][0061]
其中,η
ij
(t)为启发函数,η
ij
(t)=1/d
ij
,表示从点i转移到点j的期望程度;
[0062]
allowk为待访问点的集合,随着时间的推进,allowk中的元素不断减少,直至为空;
[0063]
α为信息素重要程度因子,β为启发函数重要程度因子;
[0064]
4.2.3更新信息素:
[0065]
在蚂蚁释放信息素的同时,各个目标点连接路径上的信息素逐渐消失,设参数ρ(0<ρ<1)表示信息素的挥发程度;因此,当所有蚂蚁完成一次循环后,各个城市间连接路径上的信息素浓度需进行实时更新,即:
[0066][0067]
其中,表示第k只蚂蚁在点i与点j连接路径上释放的信息素浓度;δτ
ij
表示所有蚂蚁在点i与点j连接路径上释放的信息素浓度之和;信息素更新采用蚁周模型,即:
[0068][0069]
式中,q为信息素常量,lk表示第k只蚂蚁在本次循环中所走路径的长度;
[0070]
4.2.4判断是否结束循环
[0071]
若i小于n,i自加1且转入步骤4.2.2;
[0072]
否则,转入步骤4.3;
[0073]
4.3输出最短路径
[0074]
计算蚂蚁所走路径的长度,选取所有蚂蚁所走路径中路程最短的一条作为最优航
迹。
[0075]
本技术的有益效果在于:
[0076]
第一,本技术的基础发明构思为:本发明通过对地面雷达聚类,并且基于聚类结果对无人机进行干扰任务分配,可以最大限度的确保多无人机在执行干扰任务时航线不相交。
[0077]
第二,本发明将多无人机多目标点干扰问题转化为了一个旅行商问题,运用蚁群算法可以很好的解决这类问题,算法的时效性较高。
附图说明
[0078]
下面结合附图中的实施例对本技术作进一步的详细说明,但并不构成对本技术的任何限制。
[0079]
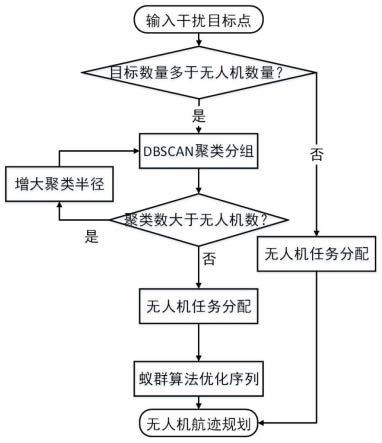
图1是多无人机协同干扰方法流程图。
[0080]
图2是机载干扰载荷模型示意图。
[0081]
图3是为聚类的算法流程图。
[0082]
图4是蚁群算法优化航迹流程图。
[0083]
图5是蚁群算法优化航程效果图。
具体实施方式
[0084]
下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚,完整的描述,显然,所述实施例是本发明的一部分实施例,而不是全部的实施例,所述实施例仅提供一种实施所提创新点的一种途径,并非唯一,不排除采用其它途径实现上述已经提到的发明。
[0085]
实施例1:一种实用多无人机协同干扰方法
[0086]
在多无人机执行协同干扰任务时,要确保每个干扰点都能被干扰,需要根据干扰目标点的分布特点来进行无人机任务分配。
[0087]
在多无人机执行协同干扰任务时,首先要判断目标数量与无人机数量的关系,如果目标数量少于无人机数量,则直接对多架无人机进行任务分配,基于任务分配结果对多无人机协同干扰航迹进行规划,并输出航点文件;如果目标数量多于总无人机数量,则基于聚类分组算法对多个任务目标进行聚类分组,若聚类后目标的聚类分组组数仍大于无人机数,则增大聚类半径,对目标进行重新分组,直至目标的聚类组数小于等于无人机数量。对目标进行合理分组后,对无人机进行任务分配,使携带干扰载荷的无人机对所有的目标都可实现协同干扰。
[0088]
任务分配结束后,基于蚁群算法对协同干扰航迹进行优化,生成多机协同干扰航迹。多无人机协同干扰任务流程如图1所示。
[0089]
结合附图1,一种多无人机协同干扰方法,包括如下步骤:
[0090]
步骤1:相关参数初始化
[0091]
1.1设定干扰目标点数量与位置:干扰目标点随机分布,多无人机协同干扰时必须将目标干扰点域全部抵近干扰一遍;
[0092]
1.2设定无人机数量m、无人机飞行速度v、无人机飞行高度h;
[0093]
1.3设定无人机搭载的干扰载荷的探测范围,以无人机质心为原点,无人机前进方向为y轴正方向,无人机右侧为x轴正方向,垂直无人机平面向上为z轴正方向构建坐标系,机载干扰载荷的扫描角为θ,干扰载荷的最大地面视场为一个半径为r
max sinθ的圆,如图2所示,若地面雷达位于干扰圆内都会受到干扰载荷的影响。
[0094]
步骤2:目标干扰点聚类(步骤2的方案流程图如图3所示)
[0095]
2.1初始化核心对象集合,以每个核心对象点为圆心,给定半径画圆,圆内的目标干扰点不少于一定数量的为核心点。
[0096]
2.2遍历所有核心对象,并将所有相邻的核心对象以及其邻域内的干扰点放入一个干扰点簇内。
[0097]
2.3将剩余的干扰点分别单独放入干扰点簇内,记录干扰点簇的总数为k。
[0098]
2.4判断k与m的关系,若k>m,则增大聚类半径,直到k≤m。
[0099]
具体而言,
[0100]
其中,eps邻域包含干扰目标点数据集d中与xj之间的距离小于等于eps的数据点,即:
[0101]neps
(xi)={xj∈d|dist(xi,xj)≤eps}
[0102]
其中,d={x1,x2,...,xm}为给定数据集,n
eps
为点xi的eps邻域包含的干扰目标点的点集;
[0103]
定义:(核心对象)eps邻域至少包含minpts个数据点,即:
[0104]
|n
eps
(xi)|≥minpts
ꢀꢀꢀ
(1)
[0105]
在具体的dbscan聚类过程中首先将数据集d中的数据点标记为未处理对象,对每个数据点计算eps半径内点的集合,集合内多于minpts个数的点标记为核心点,剩余的点如果在核心点的邻域内则被标记为边界点,最后再进行簇划分。
[0106]
包括如下步骤:
[0107]
2.1输入干扰点集合d={x1,x2,...,xm}、邻域参数minpts
[0108]
xi表示第i个无人机的位置
[0109]
2.2初始化核心对象集合:
[0110]
ω表示核心对象集合;
[0111]
表示空集
[0112]
2.3循环计算
[0113]
2.3.1j初始值为1;
[0114]
2.3.2确定干扰点xj的邻域n
eps
(xi):
[0115]neps
(xi)={xj∈d|dist(xi,xj)≤eps}
[0116]
其中,d={x1,x2,...,xm}为给定数据集,n
eps
为点xi的eps邻域包含的干扰目标点的点集。定义:(核心对象)eps邻域至少包含minpts个数据点,即:
[0117]
|n
eps
(xi)|≥minpts
[0118]
2.3.3若|n
eps
(xi)|≥minpts将干扰点xj加入核心对象集合:ω=ω∪{xj}
[0119]
2.3.4j的值加1;
[0120]
2.3.5若j大于m,退出循环,进入步骤2.4;若j小于等于m,重复步骤2.3.2~2.3.5。
[0121]
2.4初始化干扰点簇类:k=0;初始化未访问干扰点集合:γ=d;
[0122]
2.5第一重循环
[0123]
2.5.1记录当前未访问干扰点集合:γ
old
=γ
[0124]
2.5.2随机选取一个核心对象o∈ω,初始化队列q=<o>;
[0125]
2.5.3γ=γ\{o};
[0126]
2.5.4第二重循环
[0127]
2.5.4.1取出队列q中的首个样本q;q为临时核心对象集合
[0128]
2.5.4.2若|n
eps
(q)|≥minpts,令δ=n
eps
(xi)∩γ,将δ中的干扰点加入队列q,γ=γ\δ;
[0129]
2.5.4.3若重复步骤2.5.4.1~2.5.4.3;否则,进入步骤2.5.5(即是执行第二重循环的判断条件);
[0130]
2.5.5k自加1,生成聚类簇ck=γ
old
\γ,ω重新赋值为ω\ck;
[0131]
2.5.6若重复步骤2.5.1~2.5.6;否则,进入步骤2.6;
[0132]
2.6输出:簇划分c={c1,c2,...,ck},后续需要对簇进行多无人机干扰任务分配。
[0133]
步骤3:多无人机干扰任务分配
[0134]
3.1每个干扰点簇分配一架无人机执行。
[0135]
3.2计算每个干扰点簇中所需要的最短干扰航迹l,若无人机的最大航程l<l,则对该干扰点簇再进行聚类,直到l≥l。
[0136]
步骤4:基于蚁群算法对多无人机干扰航迹进行优化(步骤4的方案流程图如图4所示),其基本思路为:用蚂蚁的行走路径表示待优化问题的可行解,整个蚂蚁群体的所有路径构成待优化问题的解空间。路径较短的蚂蚁释放的信息素量较多,随着时间的推进,较短的路径上累积的信息素浓度逐渐增高,选择该路径的蚂蚁个数也愈来愈多。最终,整个蚂蚁会在正反馈的作用下集中到最佳的路径上,此时对应的便是待优化问题的最优解,所有蚂蚁所走的最短路径便是无人机干扰的最优路径。
[0137]
具体而言,包括如下子步骤:
[0138]
4.1初始化蚁群参数,同一簇内干扰点位置,设定算法运行代数,信息素更新规则采用蚁周模型。
[0139]
4.2使得每只蚂蚁对簇内所有干扰点遍历一遍,计算蚂蚁所走路径的长度,选取路径中路程最短的一条作为最优航迹。
[0140]
换作数学语言,如下:
[0141]
设蚁群中蚂蚁的数量为p,目标点的数量为t,点i与点j之间的距离为d
ij
,t时刻点i与点j连接路径上的信息素浓度为τ
ij
(t)。初始时刻,各个目标点连接路径上的信息素浓度相同,设为τi(t0)=τ0。
[0142]
蚂蚁k根据各个目标点之间连接路径上的信息素浓度决定其下一个访问节点,设表示t时刻无人机从点i转移到点j的概率,其计算公式为:
[0143][0144]
其中,η
ij
(t)为启发函数,η
ij
(t)=1/d
ij
,表示从点i转移到点j的期望程度;allowk为待访问点的集合,随着时间的推进,allowk中的元素不断减少,直至为空。α为信息素重要程度因子,β为启发函数重要程度因子。
[0145]
在蚂蚁释放信息素的同时,各个目标点连接路径上的信息素逐渐消失,设参数ρ(0<ρ<1)表示信息素的挥发程度。因此,当所有蚂蚁完成一次循环后,各个城市间连接路径上的信息素浓度需进行实时更新,即:
[0146][0147]
其中,表示第k只蚂蚁在点i与点j连接路径上释放的信息素浓度;δτ
ij
表示所有蚂蚁在点i与点j连接路径上释放的信息素浓度之和。信息素更新采用蚁周模型,即:
[0148][0149]
式中,q为信息素常量,lk表示第k只蚂蚁在本次循环中所走路径的长度。
[0150]
计算蚂蚁所走路径的长度,选取所有蚂蚁所走路径中路程最短的一条作为最优航迹。
[0151]
以上所举实施例为本发明的较佳实施方式,仅用来方便说明本发明,并非对本发明作任何形式上的限制,任何所属技术领域中具有通常知识者,若在不脱离本发明所提技术特征的范围内,利用本发明所揭示技术内容所做出局部更动或修饰的等效实施例,并且未脱离本发明的技术特征内容,均仍属于本发明技术特征的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1