一种高效的物流机器人集群路径规划方法
本发明属于机器人路径规划领域,具体涉及一种高效的物流机器人集群路径规划方法。
背景技术:
1、随着电子商务的飞速发展,海量在线购物订单给物流系统造成巨大压力。传统物流仓库难以应对高吞吐量的要求。为应对这一挑战,主流的解决方案是部署机器人集群系统,这些机器人能够把货架搬运到分拣员所在位置,分拣员从货架选取订单所需物品后,再由机器人把货架运回。通过机器人移动而分拣员固定的“货架到人”模式,极大减少了分拣人员的走动,提高了仓库的运行效率,降低了运营成本。然而,机器人集群的路径规划方式成为了决定机器人集群效率的关键,不同于传统的路径规划问题,为机器人集群系统划路径既要考虑传统路基该规划中障碍的躲避,还要考虑智机器人之间的碰撞避免问题。
2、现有机器人碰撞避免路径规划方法普遍采用了基于a*算法的路径搜索的技术。但是因为需要考虑机器人之间的彼此碰撞,因此其路径搜索空间从二维仓库平面拓展到三维时空空间。机器人的碰撞被建模成不同路径轨迹在同一时空坐标的冲突访问,基于此建模,这类规划方法便能够使用a*搜索捕捉到潜在的碰撞点。该技术由于提高了搜索空间的维度,造成搜索空间庞大,引发了巨大的运行时间和内存占用开销。尽管为了提高效率,现有工作提出了大量剪枝优化技术,尝试压缩搜索空间提高效率,在一定程度上挑了吞吐量。但是依然难以应对如今海量购物订单带来的十万级路径规划计算需求。规划时间开销大会带来分拣延时,极大降低机器人集群的运行效率。因此现有的基于a*搜索并不适用于现代大规模仓库的场景需求。
3、其他的路径规划技术通常面向共享出行场景,如地图导航、网约车和外卖员的路径规划等,这类路径规划技术因为服务群体规模庞大,通常引入了索引结构或动态规划技术提高效率,能够适用于大规模场景,但受场景限制不能应用于仓库中的物流机器人集群路径规划。具体原因在于:首先这类技术通常面向路网结构,其距离采用的是欧氏距离,而仓库中距离采用曼哈顿距离,其次这类技术并不能处理碰避免问题,因此建模方法不适用,最后此类应用中的优化目标和仓库场景不同,共享出行的优化目标和用户需求相关,如最短距离和最快时间等,而仓库的场景需求是提高吞吐量。
技术实现思路
1、针对现有路径规划技术的不足,本发明利用了仓库布局规则的特点,通过对仓库中通道和货架群的划分,重新建模仓库平面空间。该建模能够把碰撞避免限制在每个一维的通道内,从而把原来三维的时空轨迹压缩成若干二维平面轨迹。因此路径的碰撞转化成了二维平面上的线段交叉问题,极大简化了问题难度,也有助于引入索引技术加速判断,从而实现了高效的物流机器人集群路径规划,使其具备了规模可扩展性,适用于现代仓库高吞吐需求。
2、高效物流机器人集群路径规划方法,包括以下步骤:
3、步骤一,针对某一物流仓库,对仓库平面布局进行一维切分,完成仓库空间建模,形成基于一维通道的图结构g。
4、具体为:
5、在仓库中,货架构成矩形,其长边彼此平行,矩形和矩形之间为通道。
6、首先,将垂直于矩形长边的贯穿型长通道建模成条带a。
7、然后,对剩余空间按照平行于矩形长边的方向划分成宽度为1,长度和矩形长边相同的条带b。
8、最后,把每个条带a和条带b都看作图结构的一个结点,根据各条带间的毗邻关系,构造结点间的边,形成基于一维通道的图结构g。
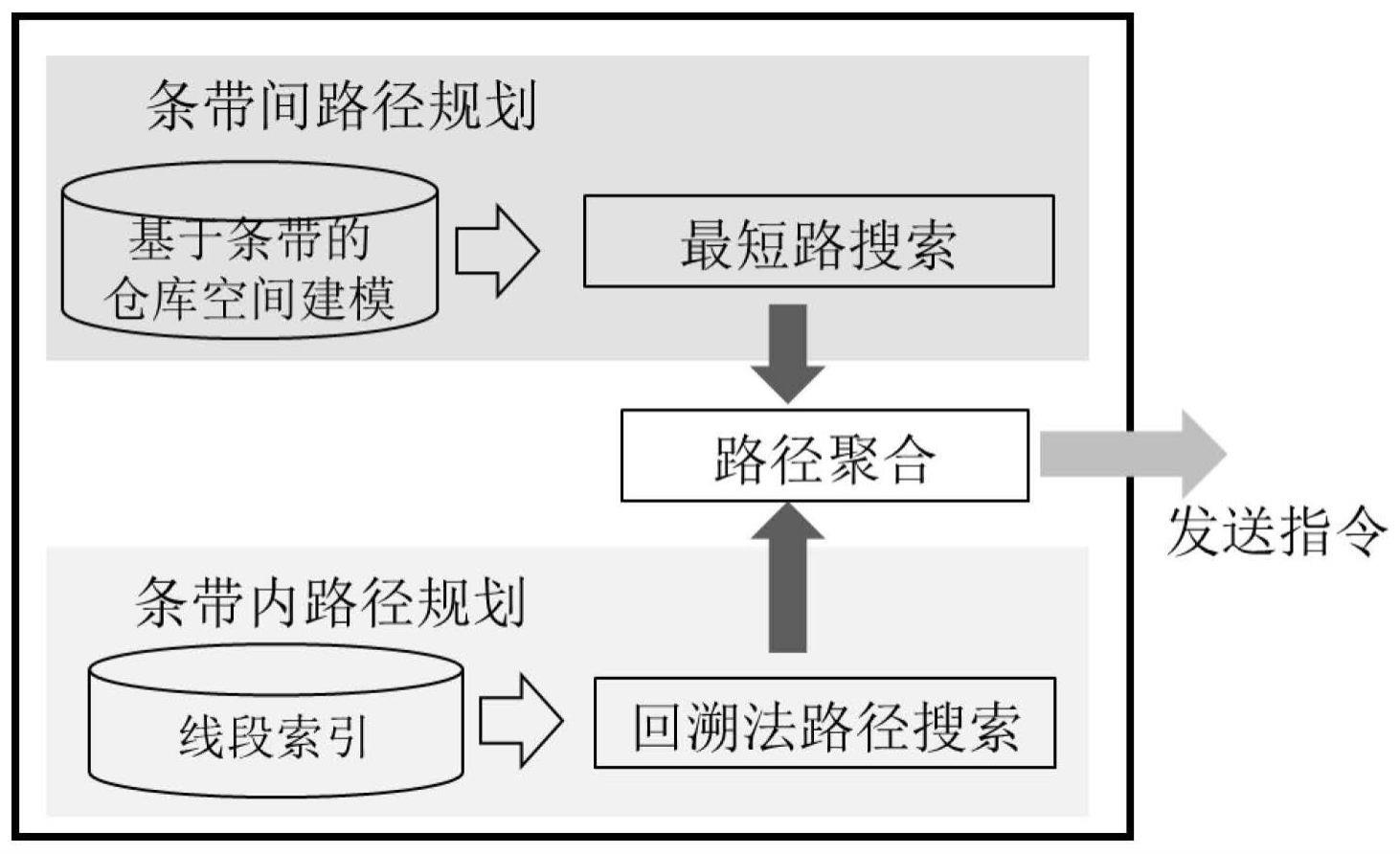
9、步骤二,在图结构g中,利用最短路径搜索技术,进行条带间路径规划。
10、设路径规划的起点和终点对为<src,dst>,找到起点和终点坐标对应的两个条带,然后在图结构g中搜索到两个条带间的最短路径长度。
11、步骤三,在条带间路径规划的基础上,采用回溯搜索方法,进行条带内路径规划。
12、所述回溯搜索方法包括探索、判断、回溯和再探索的迭代流程,具体为:
13、步骤3.1,通过激进尝试直接前进到目标位置,进行最短路径的探索过程,并形成相应的由若干线段组成的序列{φ1,φ2,…,φn},用于接下来的碰撞判断。
14、每个线段φ可以表示为二维向量组成的二元组〈s,f〉。s[0]和s[1]分别为线段起点的时间和空间坐标。f[0]和f[1]分别为线段终点的时间和空间坐标。
15、步骤3.2,在时间维度上建立红黑树索引,判断各线段φ是否和空间中现有的路径规划轨迹所对应的线段集合{ψ1,…,ψn}发生交叉;
16、具体为:
17、先按照时间二分法查找所有在时间跨度上出现重叠的线段,然后把这些潜在线段是否碰撞逐一进行判断,具体可以按照如下公式判断:
18、c(φ,ψ)=(sφ-fψ)×(sψ-fψ)(fφ-fψ)×(sψ-fψ)>0
19、∨(fψ-fφ×sφ-fφ)(sψ-fφ)×(sφ-fφ)>0
20、其中,sφ为线段φ的起点坐标,fφ为线段φ的终点坐标,fψ为现有路径规划轨迹线段ψ的终点坐标,sψ为现有路径规划轨迹线段ψ的起点坐标。
21、若不满足上述条件,则为当前线段与现有路径规划轨迹没有交叉,则继续进行下一个线段的判断;如果满足上述条件,则判断结果为有交叉,则进一步计算出碰撞的时间点,计算方式如下:
22、
23、sφ[0]为线段φ起点的时间坐标,sψ[0]为现有路径规划轨迹线段ψ起点的时间坐标,sφ[1]为线段φ起点的空间坐标,sψ[1]为现有路径规划轨迹线段ψ起点的空间坐标;
24、此时,路径会前进到碰撞时刻发生的前一个时刻等待,直至在其前进不发生碰撞时继续搜索。
25、步骤四,将规划好的条带间路径和条带内路径转化为行动指令传输给各物流机器人,对所述物流仓库内的物流机器人集群进行路径规划。
26、具体为:
27、对物流机器人集群输入一系列起点和终点对{<o1,d1>,<o2,d2>,…,<on,dn>},每个起点和终点对规划相应的路径{r1,r2,…,rn},以及每条路径r=<str,gr>包括开始的时间点str和经过的一系列位置坐标gr。满足所有路径线段不会发生碰撞,即对任意路径r1,r2,不存在同一时刻访问同一位置(gi∈g1,gj∈g2 s.t.gi=gj∧st1+i=st2+j)。
28、本发明的优点在于:
29、(1)本发明通过把位置进行聚合形成条带,避免在坐标层次上判断碰撞,而是直接从线段交叉来判断,降低了路径规划过程中碰撞的判断难度,能高效完成计算,以应用至大规模数据。
30、(2)本发明为物流机器人集群路径规划提供了一种全新框架,不同于以往按照坐标点对空间的建模,本发明通过挖掘利用仓库平面布局规则的特点,对仓库空间重新建模,把碰撞避免的判断过程限制在一维空间内,降低了碰撞判断的难度,提高路径搜索效率。
31、(3)基于上述框架,本发明把路径碰撞的判断转化为线段相交的判定问题,并基于向量坐标在常数时间内判断两条线段相交的时间点,利用红黑树索引在对数时间内快速判断和所有线段的碰撞情况。
- 还没有人留言评论。精彩留言会获得点赞!