远程遥控驾驶控制方法、系统、设备及存储介质与流程
本发明涉及车辆遥控控制,具体地说,涉及一种远程遥控驾驶控制方法、系统、设备及存储介质。
背景技术:
1、近年来智慧汽车发展迅速,越来越多的智能辅助驾驶系统相继亮相。随着高精密传感器与处理器及ai技术的导入,汽车自动驾驶系统可实时的处理路面的各种复杂情况,结合实时宽带通讯及网络技术的发展,使得车辆自动驾驶更加高效。
2、远程遥控驾驶属于智慧汽车的一种应用场景,远程遥控驾驶可实现在无人状态下根据远程遥控动作安全行车,可用于交通运输、物流快递及驾驶培训等诸多领域。遥控端通过宽带通信网络获取汽车上传的摄像头等传感器数据、激光雷达感知的周边车辆位置及速度信息,然后遥控端下传人工控制信息。然而,如何保证远程遥控驾驶的安全性,是目前面临的一个问题。
3、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本发明的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、针对现有技术中的问题,本发明的目的在于提供一种远程遥控驾驶控制方法、系统、设备及存储介质,解决现有的远程遥控驾驶的安全性无法得到保证的问题。
2、为实现上述目的,本发明提供了一种远程遥控驾驶控制方法,用于实现遥控端对无人驾驶车辆的远程遥控,所述遥控端远程连接至少一个无人驾驶车辆;所述方法包括以下步骤:
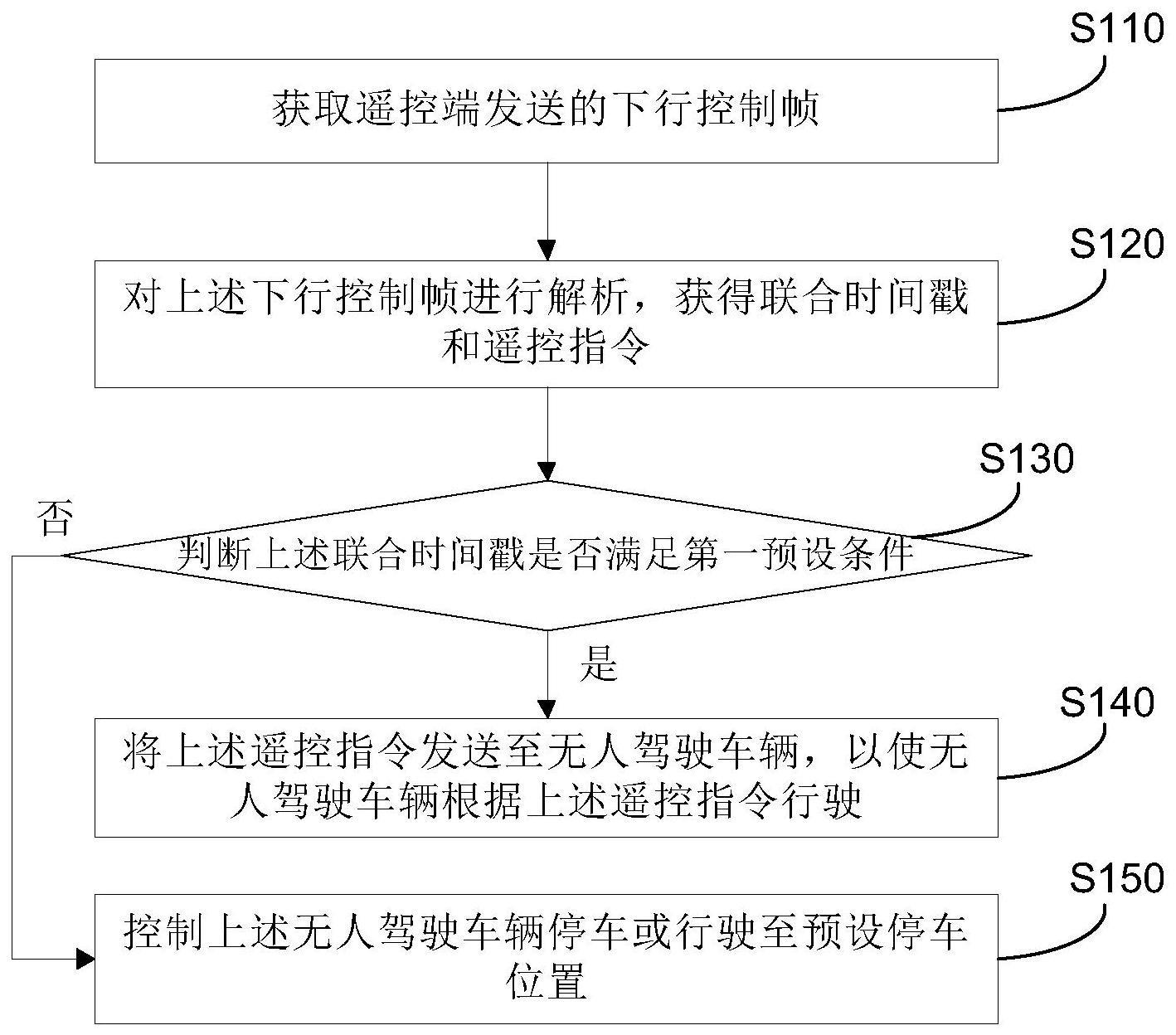
3、s110,获取遥控端发送的下行控制帧;
4、s120,对所述下行控制帧进行解析,获得联合时间戳和遥控指令;
5、s130,判断所述联合时间戳是否满足第一预设条件;若是,则执行步骤s140或者步骤s141;若否,则执行步骤s150;
6、s140,将所述遥控指令发送至所述无人驾驶车辆,以使所述无人驾驶车辆根据所述遥控指令行驶;
7、s141,对所述遥控指令进行安全验证;
8、s150,控制所述无人驾驶车辆停车或行驶至预设停车位置。
9、可选地,步骤s141包括:
10、判断所述遥控指令是否验证通过;若验证通过,执行步骤s140;否则执行所述步骤s150。
11、可选地,步骤s150包括:
12、获取地图导航数据和所述无人驾驶车辆的位置信息;
13、根据所述位置信息和所述地图导航数据,确定预设停车位置;以及
14、控制所述无人驾驶车辆以预设行车策略行驶至所述预设停车位置。
15、可选地,在步骤s110之前,所述方法还包括:
16、采集关于所述无人驾驶车辆的传感器数据,将所述传感器数据发送至所述遥控端,并记录发送所述传感器数据对应的第一时刻,作为上行数据时间戳;
17、所述遥控端接收到所述传感器数据后,生成下行控制数据包并发送至所述无人驾驶车辆,记录发送所述下行控制数据包对应的第二时刻,作为下行数据时间戳;所述联合时间戳包括所述上行数据时间戳和所述下行数据时间戳。
18、可选地,所述第一预设条件为所述下行数据时间戳与所述上行数据时间戳之间的差值小于预设时延阈值,且当前时刻与所述下行数据时间戳之间的差值小于所述预设时延阈值。
19、可选地,步骤s141包括:
20、采集关于所述无人驾驶车辆的当前环境数据;
21、根据所述当前环境数据和预设安全规则集中的每一预设安全规则,对所述遥控指令进行安全验证。
22、可选地,步骤s150包括:
23、获取所述无人驾驶车辆的历史行驶轨迹以及行驶参数信息;
24、根据所述遥控指令或所述历史行驶轨迹,计算得到与所述遥控指令对应的遥控意图;
25、根据所述遥控意图和所述行驶参数信息,计算得到关于所述无人驾驶车辆的行车控制指令;
26、对所述行车控制指令进行安全验证,判断是否验证通过;若验证通过,将所述行车控制指令发送至所述无人驾驶车辆,且在遥控意图完成后,控制所述无人驾驶车辆停车或行驶至预设停车位置;若验证未通过,控制所述无人驾驶车辆停车或行驶至预设停车位置。
27、可选地,所述至少一个无人驾驶车辆包括第一无人驾驶车辆和目标无人驾驶车辆;所述方法用于实现遥控端基于第一无线通信方式对目标无人驾驶车辆的远程遥控,所述方法在步骤s110之前,还包括步骤:
28、接收所述目标无人驾驶车辆发送的通信故障信息;所述通信故障信息用于指示所述目标无人驾驶车辆在所述第一无线通信方式上的故障;
29、所述遥控端根据所述通信故障信息,确定第一无人驾驶车辆与所述目标无人驾驶车辆基于第二无线通信方式进行通信,且所述第一无人驾驶车辆与所述遥控端基于第一无线通信方式进行通信;所述第二无线通信方式的有效通信距离小于所述第一无线通信方式的有效通信距离;
30、步骤s110包括:
31、所述第一无人驾驶车辆基于第一无线通信方式接收遥控端发送的下行控制帧,并将所述下行控制帧基于第二无线通信方式发送至所述目标无人驾驶车辆;
32、步骤s140包括:
33、将所述遥控指令发送至所述目标无人驾驶车辆,以使所述目标无人驾驶车辆根据所述遥控指令行驶。
34、可选地,所述遥控端根据所述通信故障信息,确定第一无人驾驶车辆与所述目标无人驾驶车辆基于第二无线通信方式进行通信,包括:
35、所述遥控端将与所述目标无人驾驶车辆运行相同车机系统且采用同一预设安全规则集的无人驾驶车辆,确定为第一无人驾驶车辆。
36、可选地,所述方法包括:
37、控制所述第一无人驾驶车辆对所述下行控制帧进行解析,获得联合时间戳和遥控指令;
38、控制所述第一无人驾驶车辆将所述联合时间戳和遥控指令,利用第二无线通信方式发送至所述目标无人驾驶车辆。
39、可选地,所述遥控端根据所述通信故障信息,确定第一无人驾驶车辆与所述目标无人驾驶车辆基于第二无线通信方式进行通信,包括:
40、分别获取所述第一无人驾驶车辆与所述遥控端在第一无线通信方式上的第一通信质量;以及所述第一无人驾驶车辆与所述目标无人驾驶车辆在第二无线通信方式上的第二通信质量;
41、所述遥控端将与所述目标无人驾驶车辆运行相同车机系统且采用同一预设安全规则集的无人驾驶车辆,确定为备选无人驾驶车辆;
42、将所述第二通信质量大于预设通信质量阈值,且所述第一通信质量最高的所述备选无人驾驶车辆,确定为第一无人驾驶车辆。
43、本发明还提供了一种远程遥控驾驶控制系统,用于实现上述远程遥控驾驶控制方法,所述系统包括:
44、下行控制帧获取模块,获取遥控端发送的下行控制帧;
45、下行控制帧解析模块,对所述下行控制帧进行解析,获得联合时间戳和遥控指令;
46、联合时间戳判断模块,判断所述联合时间戳是否满足第一预设条件;若是,则执行遥控指令发送模块或者遥控指令安全验证模块;若否,则执行避险驾驶控制模块;
47、遥控指令发送模块,将所述遥控指令发送至所述无人驾驶车辆,以使所述无人驾驶车辆根据所述遥控指令行驶;
48、遥控指令安全验证模块,对所述遥控指令进行安全验证;
49、避险驾驶控制模块,控制所述无人驾驶车辆停车或行驶至预设停车位置。
50、本发明还提供了一种远程遥控驾驶控制设备,包括:
51、处理器;
52、存储器,其中存储有所述处理器的可执行程序;
53、其中,所述处理器配置为经由执行所述可执行程序来执行上述任意一项远程遥控驾驶控制方法的步骤。
54、本发明还提供了一种计算机可读存储介质,用于存储程序,所述程序被处理器执行时实现上述任意一项远程遥控驾驶控制方法的步骤。
55、本发明与现有技术相比,具有以下优点及突出性效果:
56、本发明提供的远程遥控驾驶控制方法、系统、设备及存储介质在接收到下行控制帧后对其进行解析,判断解析得到的联合时间戳是否满足第一预设条件,也即判断是否延时过大,并在满足条件时发送遥控指令或者对其进行安全验证,不满足条件时执行紧急避险驾驶模式,利于保证远程遥控驾驶的安全性。
- 还没有人留言评论。精彩留言会获得点赞!