一种海上无人救援艇系统的实现及最优鲁棒性控制方法
本发明涉及海上无人救援艇实现及控制领域,特别涉及一种海上无人救援艇系统的实现及最优鲁棒性控制方法。
背景技术:
1、目前海上救援多采用先向水中投掷遥控救援艇,并控制救援艇航行至落水者附近,当落水者爬上救生艇后,救援艇将落水者运送至安全地点;以此实现海上救援,存在耗时耗财耗力,特别是在恶劣天气情况下,遥控距离有限,落水者由于长期浸泡在水中,会造成人体快速失温,进而造成体力不支,无法爬上救援艇,进而导致救援失败,落水者的生命安全无法保证的问题,因此仅仅依靠人工控制的方式进行救援使得救援难度较大。
2、随着无人驾驶技术的快速发展,无人驾驶船舶成为海上智能交通的重要研究领域。随着船联网建设的不断完善,以及云计算、大数据在航运领域的逐步应用,构建智能化的无人救援艇已成为可实现的目标。海上智能无人救援艇具有救援速度快,成本低的优点,随着我国对于不同水域或海域的开发程度不断提高,人们进行海上活动的频率也逐渐提升,海上无人智能无人救援艇的研究必然是一项重大课题。
技术实现思路
1、本发明针对上述现有技术中存在的问题,提出一种海上无人救援艇系统的实现及最优鲁棒性控制方法,实现无人救援艇在海上救援过程中,无需人为干预,智能化救援,可以多个无人救援艇同时救援工作,利用改进黏菌算法优化pid控制器,提高无人救援艇自动航行的控制性能,提高救援成功率。
2、为解决上述技术问题,本发明是通过如下技术方案实现的:
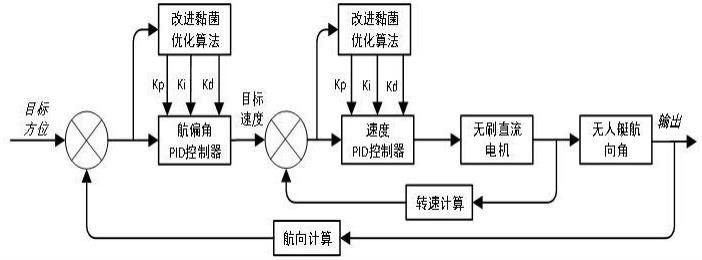
3、本发明提供一种海上无人救援艇系统的实现及最优鲁棒性控制方法,无人救援艇系统包括:无人救援艇本体、动力装置单元、航行信息输入单元、无人救援艇主控单元、随身定位单元、遥控器单元;无人救援艇的控制采用pid双闭环控制方法,实现无人救援艇航向和航速控制,通过改进黏菌优化算法优化pid参数实现无人救援艇最优鲁棒性控制。
4、无人救援艇系统具体组成为:
5、所述无人救援艇本体是双面可用的,当无人救援艇侧翻后,依然可以航行;
6、所述动力装置单元分为两组,每组包括两个电机驱动模块和两个无刷直流电机,两组动力置分别位于无人救援艇的正反两面;
7、所述航行信息输入单元包括北斗+gps双定位模块、指南针模块、mpu6050陀螺仪模块以及电源模块;
8、所述无人救援艇主控单元采用stm32f103rct6为主控芯片,根据航行信息输入单元提供的航行数据,实现无人救援艇的自动导航救援,一键返航功能;
9、所述随身定位单元包括北斗+gps双定位模块,为无人救援艇提供佩戴者位置信息;
10、所述遥控器单元包括信息显示屏和控制按键,负责显示无人救援艇航行数据和对无人救援艇下发救援指令。
11、所述通过改进黏菌优化算法优化pid参数实现无人救援艇最优鲁棒性控制,在传统黏菌算法的基础上,对线性反馈因子 b进行改进,引入自适应非线性机制,提高算法寻优速度和精度,进而提高无人救援艇控制性能;改进后的反馈因子 b按下式计算:
12、;
13、式中, b为改进后的反馈因子, it为当前迭代次数, max_iter为最大迭代次数。
14、一种海上无人救援艇系统的实现及最优鲁棒性控制方法,无人救援艇系统的实现为:
15、s1.启动无人救援艇系统,自动初始化航行信息输入单元,将无人救援艇随机抛入海中;
16、s2.无人救援艇会自动根据航行信息输入单元中的mpu6050陀螺仪传感器模块采集的落水后的船体姿态信息使能对应面的动力装置;
17、s3.进入救援等待模式,当求救者启动随身定位单元后,随身定位单元通过蓝牙通信,将求救信息发送给遥控器单元,遥控器单元通过lora通信再将求救者位置信息和救援命令发送给无人救援艇主控单元;
18、s4.北斗+gps双定位模块定位当前无人救援艇经纬度坐标,并记录下落水初始位置作为返航点,通过can协议将实时位置数据发送给无人救援艇主控单元;无人救援艇主控单元判断是否接收到救援命令,若是,则进行s5,否者进行s3,继续等待救援命令;
19、s5.无人救援艇系统进入自动导航救援模式,无人救援艇主控单元根据求救者位置信息和航行信息输入单元中定位模块提供的实时位置信息,计算出求救者相对于无人救援艇的方向和距离,然后通过控制动力执行单元调整航向,然后通过pid控制动力执行单元保证直线行驶,当求救者位置和无人救援艇当前位置距离小于2米时,无人救援艇停止;自动航行过程中,遥控器单元可以随时设置更新航行返回的返航点;
20、s6.无人救援艇到达目标位置后,落水人员按下无人救援艇主体一键返航按键或者岸基监控人员通过遥控器向无人救援艇下发一键返航命令后,无人救援艇主控单元控制救援艇以设置的返航点为目的地返航。
21、所述s2中,mpu6050陀螺仪模块采集的无人救援艇姿态信息为横滚角和俯仰角,根据无人救援艇落水后的横滚角和翻滚角判断无人救援艇的触水面,判断公式为:
22、;
23、当横滚角和俯仰角满足上式时,认定为无人救援艇反面接触水面,否则正面接触水面;
24、式中, roll为横滚角,横滚角指无人救援艇两翼所在的平面与平行线之间的夹角,范围为[-180,180]; pitch为俯仰角,俯仰角是指无人救援艇头部与水平面的夹角,范围为[-180,180];||为或。
25、所述s5中,计算出求救者相对于无人救援艇的方向和距离,具体方式为:
26、首先通过求救者的经纬度位置和初始经纬度位置计算出经度差值△x和纬度差值△y,然后根据下式计算出,求救者相对于无人救援艇的方向;
27、;
28、式中, yaw为求救者相对于无人救援艇的方向,△x为求救者相对于无人救援艇的经度差,△y为求救者相对于无人救援艇的纬度差,w2为求救者所在位置的纬度值。
29、求救者相对于无人救援艇的距离计算公式为:
30、;
31、式中, l为求救者相对于无人救援艇的直线距离, r为地球平均半径,w2为求救者所在位置的纬度值,w1为初始位置的纬度值,j2为求救者所在位置的经度值,j1为初始位置的经度值。
32、无人救援艇最优鲁棒性控制方法,通过改进黏菌优化算法优化pid参数实现无人救援艇最优鲁棒性控制,具体步骤为:
33、step1.搭建无人救援艇控制系统模型;
34、step2.参数初始化:设置黏菌搜索上界ub、下界lb,种群规模pop,最大迭代次数 max_iter,维度dim并初始化黏菌种群的位置,其中黏菌种群初始位置是由pid的三个参数决定;
35、step3.计算黏菌种群每个个体的当前适应度值并递增排序,记录当前迭代最好适应度值bf和当前迭代最差适应度值wf;适应度值函数为:
36、;
37、式中, j为适应度值, e(t)为pid控制系统的输入系统的反馈偏差, t为时间, s(i)为适应度函数值。
38、step4.计算自适用非线性反馈因子 b;自适用非线性反馈因子 b公式为:
39、;
40、式中, b为改进后的反馈因子, it为当前迭代次数, max_iter为最大迭代次数。
41、step5.判断 rand是否小于自定义参数z,所述z取0.03;
42、step6.若 rand<z,则直接执行下式(1)更新种群个体位置,否则判断rand是否大于控制变量p;
43、(1) ;
44、式中,为下一次迭代的黏菌新位置, ub和 lb分别表示搜索区域的上下界, rand表示取值[0,1]之间的随机数, t为当前迭代次数, i为第i个黏菌 ,j为第j维。
45、若 rand<p,则执行下式(2)更新种群个体位置;
46、(2) ;
47、式中, r 1为正弦参数, r 2为[0, 2]内的随机数,决定黏菌个体的移动距离; r 3为[0,2]内的随机数,控制最优个体对黏菌后一位置的影响, r 4为0~1间的随机数, x best为最优个体位置, w为权值系数,为第i个黏菌的第j维位置,为下一次迭代的黏菌新位置。
48、否则, rand>=p,则执行下式(3)更新种群个体位置;
49、(3);
50、其中 vc= [− b, b],;
51、式中,为下一次迭代的黏菌新位置,为第i个黏菌的第j维位置, vc为在[− b, b]之间振荡并最终趋于零的参数。
52、step7.根据贪婪策略保留较优解;
53、step8.判断当前迭代次数 it是否满足迭代停止条件,若满足,则迭代结束,输出全局最优解及适应度值,所述全局最优解为pid的最优参数;若不满足,继续对最新迭代结果进行迭代,执行step3;
54、step9.将最优参数赋值给kp、ki、kd并带入到无人救援艇控制系统模型中,实现最优鲁棒性控制。
55、相较于现有技术,本发明具有以下优点:
56、(1)本发明一种海上无人救援艇系统的实现及最优鲁棒性控制方法,具备智能化操作,采用国产北斗定位与gps双模定位,运用指南针进行实时航向检测,实现无人救援艇自动导航和一键返航救援;
57、(2)本发明一种海上无人救援艇系统的实现及最优鲁棒性控制方法,无人救援艇可实现双面航行,不需要摆正位置然后投放,大大节约投放时间,提高投放效率;
58、(3)本发明一种海上无人救援艇系统的实现及最优鲁棒性控制方法,无人救援艇控制采用改进黏菌算法优化的双闭环pid控制器,大大提高了无人救援艇自动化控制性能,提高救援率。
- 还没有人留言评论。精彩留言会获得点赞!