多机库飞行路径的规划方法、装置、电子设备及存储介质与流程
本技术涉及无人机控制,具体而言,涉及一种多机库飞行路径的规划方法、装置、电子设备及存储介质。
背景技术:
1、随着科技的高速发展,无人机巡检在电力使用中越来越多,传统的无人机巡检需要专业飞手拿着无人机去到需要巡检的杆塔附近然后手动去巡检需要重点检查的地方,例如绝缘子等。这样巡检方式不但需要培训专业的飞手耗费人力资源,而且拿着无人机去指定的杆塔耗费时间,如何能同时对多个杆塔进行巡检,是目前急需解决的问题。
技术实现思路
1、本技术的目的在于提供一种多机库飞行路径的规划方法、装置、电子设备及存储介质,通过本技术的实施例的技术方案,通过获取多个待巡检的杆塔和多个机库;根据预设的匹配算法,确定所述机库和与所述机库对应的杆塔的机库集合;在每一个机库集合中,根据所述杆塔的杆塔编码和杆塔模型、所述机库的机库编码生成与所述杆塔对应的巡检路径;根据所述巡检路径,控制多个机库对应的无人机对所述杆塔进行巡检,通过本技术实施例可以先对多个杆塔和机库进行匹配,在每一个机库的巡检范围内,生成该机库巡检范围内的与杆塔对应的巡检路径,同时控制多个机库内的无人机对杆塔进行巡检,提高了巡检效率。
2、第一方面,本技术提供了一种多机库飞行路径的规划方法,包括:
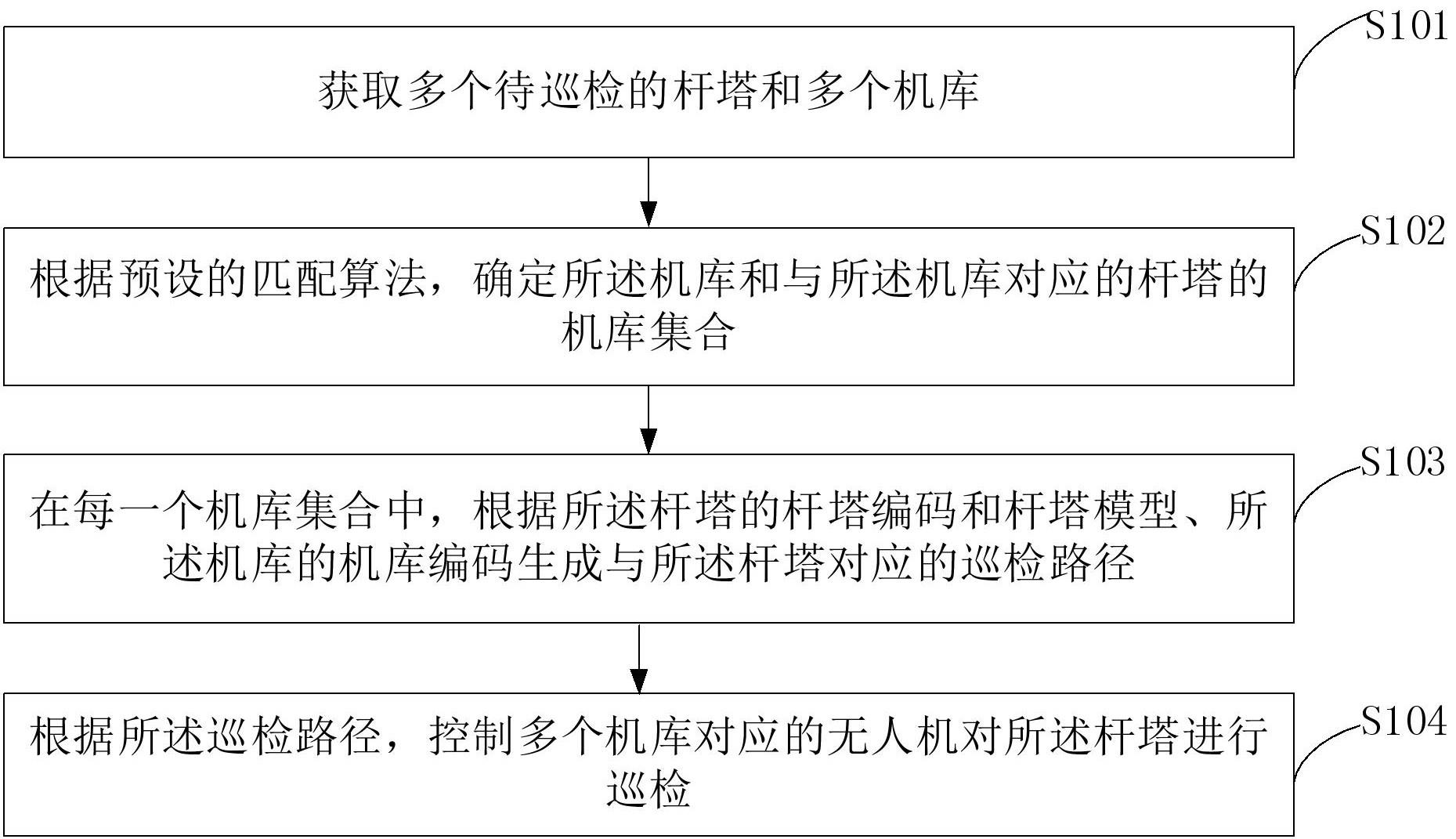
3、获取多个待巡检的杆塔和多个机库;
4、根据预设的匹配算法,确定所述机库和与所述机库对应的杆塔的机库集合;
5、在每一个机库集合中,根据所述杆塔的杆塔编码和杆塔模型、所述机库的机库编码生成与所述杆塔对应的巡检路径;
6、根据所述巡检路径,控制多个机库对应的无人机对所述杆塔进行巡检。
7、本技术先对多个杆塔和机库进行匹配,在每一个机库的巡检范围内,生成该机库巡检范围内的与杆塔对应的巡检路径,同时控制多个机库内的无人机对杆塔进行巡检,提高了巡检效率。
8、可选地,所述根据预设的匹配算法,确定所述机库和与所述机库对应的杆的集合,包括:
9、对每一个待巡检的杆塔进行循环判断;
10、若所述待巡检的杆塔在机库的巡检范围内,则将所述待巡检的杆塔和对应的机库存放在所述集合中。
11、本技术通过将杆塔与机库进行匹配,从而可以清晰明了的知道哪些杆塔成功创建巡检任务,哪些杆塔失败创建巡检任务。
12、可选地,所述方法还包括:
13、若所述待巡检的杆塔未在所述机库的巡检范围内,则设置移动机库,以使所述待巡检的杆塔位于所述移动机库的巡检范围内。
14、本技术中通过对杆塔和机库进行判断,若杆塔不在机库的巡检范围内,则可以设置移动机库,保证杆塔在移动机库的巡检范围内,从而可以同时对多个杆塔进行巡检,提高巡检效率。
15、可选地,所述根据所述巡检路径,控制多个机库对应的无人机对所述杆塔进行巡检,包括:
16、每隔预设时间段,根据所述巡检路径,控制多个机库对应的无人机对所述杆塔进行巡检。
17、本技术通过设置巡检时间段,确定机库的下次执行巡检杆塔任务的时间,每个机库到达指定的时间后就开始执行任务。
18、可选地,所述根据所述巡检路径,控制多个机库对应的无人机对所述杆塔进行巡检,包括:
19、根据所述巡检路径,确定执行一次巡检杆塔的第一执行时间;
20、根据所述第一执行时间、两个杆塔之间的航线时长和机库动作时长,确定巡航时间;
21、根据所述巡航时间和所述巡检路径,控制多个机库对应的无人机对所述杆塔进行巡检。
22、本技术在生成航线的时候计算出航线的执行时长,确定第一次执行巡检杆塔任务的时间,后面的任务执行时间就是此任务的开始时间加上航线的时长再加上机库动作时间,在时间上避免浪费,提高各个机库资源的利用率,减少巡检时间成本。
23、第二方面,本技术提供了一种多机库飞行路径的规划装置,包括:
24、获取模块,用于获取待巡检的杆塔和机库;
25、匹配模块,用于根据预设的匹配算法,确定所述机库和与所述机库对应的杆塔的集合;
26、生成模块,用于在每一个集合中,根据所述杆塔的杆塔编码和杆塔模型、所述机库的机库编码生成与所述杆塔对应的巡检路径;
27、控制模块,用于根据所述巡检路径,控制多个机库对应的无人机对所述杆塔进行巡检。
28、本技术先对多个杆塔和机库进行匹配,在每一个机库的巡检范围内,生成该机库巡检范围内的与杆塔对应的巡检路径,同时控制多个机库内的无人机对杆塔进行巡检,提高了巡检效率。
29、可选地,所述匹配模块用于:
30、对每一个待巡检的杆塔进行循环判断;
31、若所述待巡检的杆塔在机库的巡检范围内,则将所述待巡检的杆塔和对应的机库存放在所述集合中。
32、本技术通过将杆塔与机库进行匹配,从而可以清晰明了的知道哪些杆塔成功创建巡检任务,哪些杆塔失败创建巡检任务。
33、可选地,所述匹配模块用于:
34、若所述待巡检的杆塔未在所述机库的巡检范围内,则设置移动机库,以使所述待巡检的杆塔位于所述移动机库的巡检范围内。
35、本技术中通过对杆塔和机库进行判断,若杆塔不在机库的巡检范围内,则可以设置移动机库,保证杆塔在移动机库的巡检范围内,从而可以同时对多个杆塔进行巡检,提高巡检效率。
36、可选地,所述控制模块用于:
37、每隔预设时间段,根据所述巡检路径,控制多个机库对应的无人机对所述杆塔进行巡检。
38、本技术通过设置巡检时间段,确定机库的下次执行巡检杆塔任务的时间,每个机库到达指定的时间后就开始执行任务。
39、可选地,所述控制模块用于:
40、根据所述巡检路径,确定执行一次巡检杆塔的第一执行时间;
41、根据所述第一执行时间、两个杆塔之间的航线时长和机库动作时长,确定巡航时间;
42、根据所述巡航时间和所述巡检路径,控制多个机库对应的无人机对所述杆塔进行巡检。
43、本技术在生成航线的时候计算出航线的执行时长,确定第一次执行巡检杆塔任务的时间,后面的任务执行时间就是此任务的开始时间加上航线的时长再加上机库动作时间,在时间上避免浪费,提高各个机库资源的利用率,减少巡检时间成本。
44、第三方面,本技术提供一种电子设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其中,所述处理器执行所述程序时可实现如第一方面任一实施例所述的多机库飞行路径的规划方法。
45、第四方面,本技术提供一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时可实现如第一方面任一实施例所述的多机库飞行路径的规划方法。
46、第五方面,本技术提供一种计算机程序产品,所述的计算机程序产品包括计算机程序,其中,所述的计算机程序被处理器执行时可实现如第一方面任一实施例所述的多机库飞行路径的规划方法。
- 还没有人留言评论。精彩留言会获得点赞!