一种基于云通信的多无人船自触发协同路径跟踪控制系统
本发明涉及多无人船控制,主要研究了多无人船协同路径跟踪问题,并提出了一种基于云通信的多无人船自触发协同路径跟踪控制系统。
背景技术:
1、近年来,由于单无人船存在任务能力受限、任务效率低、安全风险高、数据获取有限和适应性差等局限,多无人船协同控制方法受到了国内外研究人员的广泛关注。多无人船可以通过无线通信和自主协调,实现任务分工、信息共享和互相支持。每个无人船可以专注于特定的任务,通过互相配合和协调,可以更快速地完成任务。多无人船可以扩展任务的范围和覆盖面,提高任务的安全性和可靠性,降低成本和风险。多无人船的运动控制场景主要分为协同目标跟踪、协同轨迹跟踪、协同路径跟踪。由于协同路径跟踪的空间要求和时间要求是解耦的,多无人船协同路径跟踪更适用于海上搜救、海洋勘测、环境监测等实际应用。
2、针对多无人船协同路径跟踪问题,国内外研究人员做了大量的工作,在具体的多无人船系统一致性问题中,多数工作假设无人船能够连续地或周期性地获取邻居信息,频繁的通信加大了通信网络的负担,而在实际海洋环境中,通信网络存在通信带宽窄和速率低等缺陷,对多无人船协同任务的执行产生极大的影响。部分研究人员考虑了海上存在的通信网络受限的问题,提出了事件触发和自触发的控制方法。但是,多数的事件触发方法需要持续地获得邻居信息来连续的监测一些触发函数,并未有效地减少通信次数。多数的自触发算法不需要连续地获得邻居信息,有效地减少了通信次数,但是协同收敛性往往受到一定影响。
技术实现思路
1、为了解决通信网络受限的条件下多艘无人船之间的协同问题,本发明提出了一种基于云通信的多无人船自触发协同路径跟踪控制系统,在该系统中,每艘船舶间歇性地与云服务器进行智能通信。通过引入约定的概念,使各船舶可以更好地估计邻船的未来状态,因此在该系统策略下,每艘船舶不仅能自主决定下一个通信时刻,还能减少通信请求量。
2、本发明采用的技术手段如下:
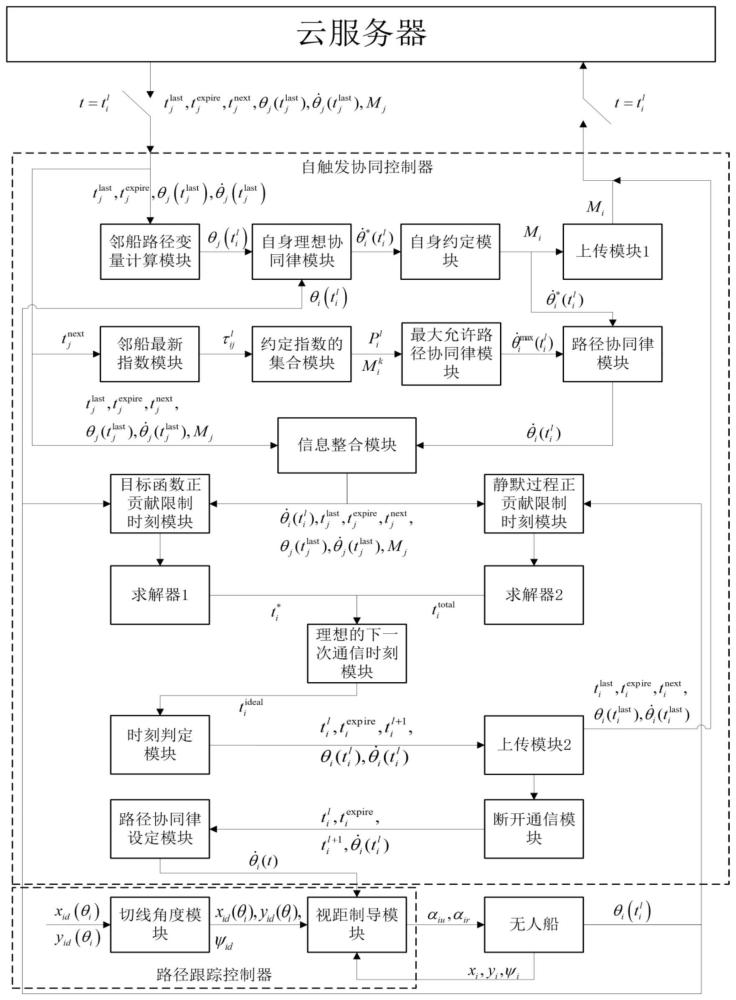
3、一种基于云通信的多无人船自触发协同路径跟踪控制系统,包括云服务器,n艘无人船以及分别与所述n艘无人船对应的n个自触发协同控制器和n个路径跟踪控制器,n>1;
4、任意所述自触发协同控制器包括邻船路径变量计算模块、自身理想协同律模块、自身约定模块、邻船最新指数模块、约定指数的集合模块、最大允许路径协同律模块、路径协同律模块、信息整合模块、目标函数正贡献限制时刻模块、求解器1、静默过程正贡献限制时刻模块、求解器2、理想的下一次通信时刻模块、时刻判定模块、上传模块1、上传模块2、断开通信模块以及路径协同律设定模块,
5、所述云服务器的输出端与邻船路径变量计算模块、邻船最新指数模块和信息整合模块的输入端相连,所述云服务器的输出端用于输出第j艘船舶最后一次通信的时间第j艘船舶控制终止的时间第j艘船舶下次将要通信的时间第j艘船舶最终更新的路径变量第j艘船舶最终的协同律和第j艘船舶自身约定mj;
6、所述邻船路径变量计算模块的输出端与自身理想协同律模块输入端相连,所述邻船路径变量计算模块的输出端用于输出邻船路径变量
7、所述自身理想协同律模块的输入端用于接收邻船路径变量和第i艘船舶路径变量输出端用于输出第i艘船舶的自身理想协同律
8、所述自身约定模块的输入端用于接收第i艘船舶的自身理想协同律输出端用于输出第i艘船舶自身约定mi和第i艘船舶的自身理想协同律
9、所述上传模块1用于接收并上传第i艘船舶自身约定mi;
10、所述邻船最新指数模块的输出端与约定指数的集合模块的输入端相连,所述邻船最新指数模块的输出端用于输出第j艘船舶获得第i艘船舶约定的时间
11、所述约定指数的集合模块的输入端用于接收第j艘船舶获得第i艘船舶约定的时间输出端用于输出第i艘船舶必须遵守的约定指数的集合pil和第i艘船舶接受到的邻居第j艘船舶的约定
12、所述最大允许路径协同律模块的输入端用于接收第i艘船舶必须遵守的约定指数的集合pil和第i艘船舶接受到的邻居第j艘船舶的约定输出端用于输出第i艘船舶的最大允许路径协同律
13、所述路径协同律模块的输入端用于接收第i艘船舶的最大允许路径协同律和第i艘船舶的自身理想协同律输出端用于输出第i艘船舶的路径协同律
14、所述信息整合模块的输入端用于接收第j艘船舶最终更新的路径变量第j艘船舶最终的协同律第j艘船舶自身约定mj以及第i艘船舶的路径协同律输出端用于输出第i艘船舶的路径协同律第j艘船舶最后一次通信的时间第j艘船舶控制终止的时间第j艘船舶下次将要通信的时间第j艘船舶最终更新的路径变量第j艘船舶最终的协同律和第j艘船舶自身约定mj;
15、所述目标函数正贡献限制时刻模块的输入端用于接收第i艘船舶的路径协同律第j艘船舶最后一次通信的时间第j艘船舶控制终止的时间第j艘船舶下次将要通信的时间第j艘船舶最终更新的路径变量第j艘船舶最终的协同律和第j艘船舶自身约定mj,输出端与求解器1的输入端相连,经过求解器1求解后输出表示的第一个时间点,此时第i艘船舶无法保证对于目标函数的正贡献;
16、所述静默过程正贡献限制时刻模块的输入端用于接收第i艘船舶的路径协同律第j艘船舶最后一次通信的时间第j艘船舶控制终止的时间第j艘船舶下次将要通信的时间第j艘船舶最终更新的路径变量第j艘船舶最终的协同律和第j艘船舶自身约定mj,输出端与求解器2的输入端相连,经过求解器2求解后输出表示的第一个时间点,在该时间点之后,第i艘船舶无法再保证其在淹没区间内的总贡献为正值;
17、理想的下一次通信时刻模块的输入端用于接收和输出端用于输出端理想的下次通信时刻
18、所述时刻判定模块的输入端用于接收最大静默时间tmax、等待时间常数twait和理想的下次通信时刻输出端用于输出第i艘船舶建立通信的时间第i艘船舶控制终止的时间第i艘船舶下次通信的时间第i艘船舶路径变量和第i艘船舶的路径协同律
19、所述上传模块2用于接收并上传第i艘船舶建立通信的时间第i艘船舶控制终止的时间第i艘船舶下次通信的时间第i艘船舶路径变量和第i艘船舶的路径协同律
20、所述断开通信模块的输入端与上传模块2的输出端相连,输出端用于输出第i艘船舶建立通信的时间第i艘船舶控制终止的时间第i艘船舶下次通信的时间和第i艘船舶的路径协同律
21、所述路径协同律设定模块的输入端用于接收第i艘船舶建立通信的时间第i艘船舶控制终止的时间第i艘船舶下次通信的时间和第i艘船舶的路径协同律输出端用于输出第i艘船舶的路径协同律
22、较现有技术相比,本发明具有以下优点:
23、第一,本发明考虑的云服务器模型具有共享存储和智能备份的优点,使其适合于分布式系统的信息交换和存储。同时,本发明提出的方法中云服务器只进行信息交换和存储,不执行计算,使得此方法也适用于简单的通信网络,适用范围更加广泛。
24、第二,与现有基于连续通信的多无人船协同路径跟踪控制方法相比,本发明提出的控制方法不需要连续地发送自身信息和监听邻居信息,有效的减少了通信次数,能够降低通信的能量消耗和通信宽带需求。
25、第三,与现有基于自触发的多无人船协同路径跟踪控制方法相比,本发明提出的控制方法通过使用控制约定,能够更加精确的估计邻居的控制边界,使得无人船可以自治地决定触发时刻,同时保证所有无人船达到一致平衡点,还能够避免芝诺行为。
- 还没有人留言评论。精彩留言会获得点赞!