一种机器人路径规划与避障方法及系统与流程
本发明属于机器人导航领域,具体涉及机器人路径规划与避障方法及系统。
背景技术:
1、近年来,随着科技的快速发展,移动机器人作为一个具备多项功能的综合系统,移动机器人要想完成任务,实现机器人的路径规划与动态避障,是其必不可少的关键技术之一。根据对环境信息的理解程度,可将移动机器人路径规划分为基于全局地图信息的全局路径规划以及基于局部地图信息的局部路径规划。目前为了实现综合效果最佳,通常采用将全局与局部路径规划算法相融合的方式以实现全局路径规划与局部避障。
2、但目前全局路径规划与局部路径规划仍存在一些不足。全局路径规划算法主要有图搜索类算法、随机采样算法、智能仿生算法等,但图搜索类算法存在高维空间或复杂环境搜索效率降低等不足;随机采样算法存在耗费计算资源量大、系统运算实时性差、结果非最优等不足;智能仿生算法存在算法收敛速度较慢、规划路径时间长,容易陷入局部最优等不足。传统的局部路径规划算法有人工势场法、动态窗口法等,但是人工势场法也存在局部极值点、易在狭窄通道中摆动、障碍物附近目标不可达等问题,动态窗口法则存在高度依赖全局参数、前瞻性不足、易在未知环境中失败,避障的实时性一般等不足。且目前算法都是使用基于串行计算的冯诺依曼架构计算机实现的,而串行计算的效率一般都较低。
技术实现思路
1、本发明提供了一种机器人路径规划与避障方法及系统,为了解决上述全局与局部路径规划融合方案中规划速度慢、结果非最优、避障实时性和复杂环境适应性不足、计算效率低等问题。
2、为达到上述目的,本发明所采用的技术方案是:
3、本发明第一方面提供了一种机器人路径规划与避障方法,包括:
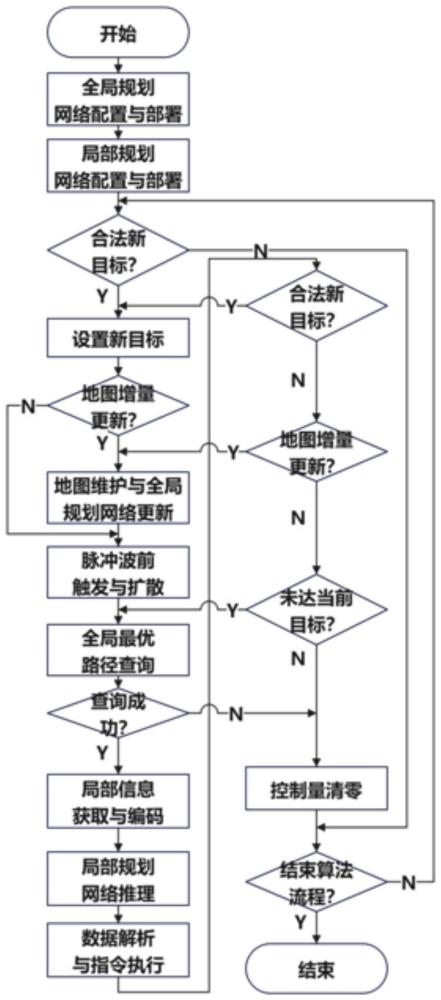
4、获取全局地图占位信息并依据全局地图占位信息建立2d网格占位地图;根据2d网格占位地图尺寸、分辨率建立对应大小的全局规划脉冲神经网络,所述全局规划脉冲神经网络部署于神经形态硬件上;根据使用强化学习算法训练后的局部规划脉冲深度神经网络完成参数配置,训练后的局部规划脉冲深度神经网络部署于神经形态硬件上;
5、采集全局目标位置和增量地图信息对全局规划脉冲深度神经网络进行更新;根据机器人起始位置和全局目标位置确定全局规划脉冲神经网络中的起始脉冲神经元和目标脉冲神经元,从起始脉冲神经元并行向外扩散的脉冲神经元波前获得脉冲发射时间梯度地图,查询起始脉冲神经元到目标脉冲神经元的全局最优路径;
6、根据全局最优路径获取局部目标位置信息,接收机器人采集的环境信息和机器人状态信息并处理转化为脉冲数据;
7、将脉冲数据信息输入至局部规划脉冲深度神经网络输出控制指令,由机器人执行控制指令直至到达全局目标位置。
8、优选的,获取全局地图占位信息并依据全局地图占位信息建立2d网格占位地图;根据2d网格占位地图尺寸、分辨率建立对应大小的全局规划脉冲神经网络的方法包括:
9、根据全局地图占位信息进行障碍物或边界膨胀,建立2d网格占位地图;将2d网格占位地图的每一个网格一一映射为全局规划脉冲神经网络的脉冲神经元,全局规划脉冲神经网络采用lif模型,所述全局规划脉冲神经网络中膜电位v与突触电流之和i的关系如下式:
10、
11、其中,τm=cmrm为膜时间常量;cm为膜电容;rm为膜电阻;vrest为静息电位;i为各个突触前神经元放电行为产生的突触电流之和;
12、当膜电位v大于等于阈值电位vth,神经元发射脉冲,同时将膜电位v复位到重置电位vreset,并在绝对不应期tref之内保持不变;当膜电位v小于阈值电位vth时,膜电位按照膜时间常量τm衰减直到静息电位vrest;
13、为相邻的两脉冲神经元之间创建脉冲神经元连接形成全局规划脉冲神经元网络;将每一个障碍物占用网格对应脉冲神经元的所有脉冲神经元连接配置为全除能,并标记障碍物占用网格的状态为占位。
14、优选的,为相邻的两脉冲神经元之间创建脉冲神经元连接形成全局规划脉冲神经元网络的方法包括:
15、每脉冲神经元采用八连接方式与其周围的脉冲神经元进行双向连接创建脉冲神经元连接,设定脉冲神经元连接权重为l,形成全局规划脉冲神经元网络。
16、优选的,根据使用强化学习算法训练后的局部规划脉冲深度神经网络完成参数配置的方法包括:
17、所述局部规划脉冲深度神经网络由4层全连接层组成,局部规划脉冲深度神经网络中的神经元模型采用基于具有固定阈值和衰减指数突触后电流的lif模型;所述4层全连接层中神经元的数量分别为n1、n2、n3和n2;
18、所述局部规划脉冲深度神经网络模电压更新公式如下:
19、cj(t)=dc·cj(t-1)+∑jwjisi(t)
20、vj(t)=dv·vj(t-1)·(1-sj(t-1))+ci(t)
21、
22、其中,t为当前时刻,cj为当前全连接层第j个神经元的电流,dc为电流衰减系数,wji为前一全连接层第i个神经元连向当前全连接层中第j个神经元的突触权值,si为前一全连接层中第i个神经元输出的脉冲序列,vj为当前全连接层中第j个神经元的膜电压,dv为电压衰减系数,vth为脉冲发放阈值;
23、使用强化学习算法在仿真环境下训练所述局部规划脉冲深度神经网络获得网络连接权重wji。
24、优选的,采集全局目标位置和增量地图信息对全局规划脉冲深度神经网络进行更新的方法包括:
25、采集全局目标位置,若全局目标位置为新的目标位置且在所述2d网格占位地图的自由网格内,则全局目标位置所在自由网格对应的脉冲神经元确立为新的目标脉冲神经元;所述2d网格占位地图的自由网格为2d网格占位地图中未被障碍物占用的网格;否则,终止机器人路径规划程序;
26、判断是否有主动输入的静态增量地图信息以及当前环境是否存在动态增量地图信息;
27、若有主动输入的静态增量地图信息,所述静态增量地图信息包括占用网格增加与占用网格去除;根据静态增量地图信息更新2d网格占位地中占用网格和自由网格状态,以及对应位置脉冲神经元的连接配置;
28、若机器人局部可见环境范围内环境变化网格数量占总网格数的比例大于判断阈值α,则判断为存在动态增量地图信息;所述动态增量地图信息包括占用网格增加与占用网格去除,根据动态增量地图信息更新2d网格占位地中占用网格和自由网格状态,以及对应位置脉冲神经元的连接配置。
29、优选的,从起始脉冲神经元并行向外扩散的脉冲神经元波前获得脉冲发射时间梯度地图的方法包括:
30、对起始脉冲神经元施加单脉冲刺激;
31、起始脉冲神经元发射的脉冲激活周围连接的脉冲神经元,从而形成并行向外扩散的脉冲波前;
32、脉冲波前在从起始脉冲神经元出发的有向连接可达的脉冲神经元之间传播,等待从起始脉冲神经元出发的有向连接可达的脉冲神经元都被激活后,脉冲波前传播停止;
33、记录脉冲波前扩散过程中所有发射脉冲的脉冲神经元的神经元id与脉冲发射时间并生成脉冲发射时间梯度地图。
34、优选的,查询起始脉冲神经元到目标脉冲神经元的全局最优路径的方法包括:
35、判断机器人起始位置是否在自由网格内;若机器人起始位置在自由网格内,将机器人起始位置对应的脉冲神经元即为起始脉冲神经元;否则判断机器人起始位置的膨胀宽度范围内是否有自由脉冲神经元,如果有则将机器人起始位置坐标加入路径列表list,同时查找最早发射脉冲的神经元作为起始脉冲神经元,如果机器人起始位置的膨胀宽度范围内未存在自由脉冲神经元视为非法起始位置,终止机器人路径规划程序;
36、从起始脉冲神经元开始进行路径查询,当前脉冲神经元相连的所有脉冲神经元中如果存在唯一最早发射的脉冲神经元,则将最早发射的脉冲神经元作为下一次查询的起点;当前脉冲神经元相连的所有脉冲神经元中最早发射的脉冲神经元个数大于1,则优先选择路径更短的,如果最早发射且路径最短的脉冲神经元个数也大于1,则从中随机选择1个作为下一次查询的起点;
37、记录查询过程中的每一步的脉冲神经元对应的网格中心坐标并加入路径列表list,直到查询到目标脉冲神经元,最终的路径列表list即为起始位置到全局目标位置的最优路径。
38、优选的,根据全局最优路径获取局部目标位置信息,接收机器人采集的环境信息和机器人状态信息并处理转化为脉冲数据的方法包括:
39、遍历起始位置到全局目标位置的最优路径上的每个脉冲神经元,根据局部环境最远目标距离dlocal对最优路径进行划分为多段局部路径并获取局部目标位置信息;如果起始位置和全局目标位置的欧氏距离小于局部环境最远目标距离dlocal,则取全局目标位置即作为局部目标位置信息;
40、接收机器人采集的环境信息和机器人状态信息,并结合局部目标位置信息一同计算得到综合参考信息st,st={gdis,gdir,vt,ωt,s},其中gdis和gdir表示机器人到局部目标位置的相对位置和角度,vt和ωt表示机器人的角速度和线速度,s表示机器人激光雷达的距离观测信息;
41、采用泊松编码方式对综合参考信息st进行编码,在给定的时间窗口中生成脉冲数据。
42、优选的,将脉冲数据信息输入至局部规划脉冲深度神经网络输出控制指令,由机器人执行控制指令直至到达全局目标位置的方法包括:
43、将脉冲数据信息输入至局部规划脉冲深度神经网络,并执行局部规划脉冲深度神经网络推理过程,统计局部规划脉冲深度神经网络输出层2个脉冲神经元发射的脉冲个数action[0],action[1];
44、根据脉冲个数action[0],action[1]数据计算得到控制机器人运动的控制指令at=(vlinear,vangular),计算公式为:
45、vleft=action[0]*(vmax-vmin)+vmin
46、vright=action[1]*(vmax-vmin)+vmin
47、vlinear=(vleft+vright)/2
48、vangular=(vleft+vright)/diff
49、其中,vlinear为机器人线速度控制指令,vangular为机器人角速度控制指令,vmax为机器人最大前进速度,vmin为机器人最大后退速度,diff为机器人两轮间距;
50、由机器人在控制周期tcontrol内持续执行控制指令at后,重复接收机器人采集的环境信息和机器人状态信息并处理转化为脉冲数据;将脉冲数据信息输入至局部规划脉冲深度神经网络输出控制指令,由机器人执行控制指令直至到达全局目标位置。
51、第二方面本发明提供了一种机器人路径规划与避障系统,包括:
52、全局规划网络配置模块,用于获取全局地图占位信息并依据全局地图占位信息建立2d网格占位地图;根据2d网格占位地图尺寸、分辨率建立对应大小的全局规划脉冲神经网络;
53、全局规划脉冲神经网络部署模块,用于将全局规划脉冲神经网络部署至神经形态硬件上;
54、局部规划网络配置模块,用于根据使用强化学习算法训练后的局部规划脉冲深度神经网络完成参数配置;
55、局部规划脉冲深度神经网络部署模块,用于将训练后的局部规划脉冲深度神经网络部署至神经形态硬件上;
56、增量地图维护模块,用于采集全局目标位置和增量地图信息;
57、全局规划脉冲神经网络更新模块,用于根据全局目标位置和增量地图信息对全局规划脉冲深度神经网络进行更新;
58、全局规划网络脉冲波前触发模块,用于根据机器人起始位置和全局目标位置确定全局规划脉冲神经网络中的起始脉冲神经元和目标脉冲神经元,触发起始脉冲神经元形成刺激信号;
59、全局规划网络脉冲波前扩散模块,从起始脉冲神经元并行向外扩散脉冲神经元波前获得脉冲发射时间梯度地图;
60、全局最优路径查询模块,用于查询起始脉冲神经元到目标脉冲神经元的全局最优路径;
61、局部规划信息获取与编码模块,用于接收机器人采集的环境信息和机器人状态信息并处理转化为脉冲数据;局部规划网络推理模块,用于接收脉冲数据并输入至输入部署完成的局部规划脉冲深度神经网络;并执行脉冲神经网络推理过程,最终输出脉冲推理数据发送给数据解析与控制指令生成模块;
62、数据解析与控制指令生成模块,用于将脉冲数据信息输入至局部规划脉冲深度神经网络输出控制指令,控制机器人执行控制指令直至到达全局目标位置。第三方面本发明提供了电子设备,包括存储介质和处理器;所述存储介质用于存储指令;所述处理器用于根据所述指令进行操作以执行第一方面所述的方法。
63、与现有技术相比,本发明的有益效果:
64、本发明获取全局地图占位信息并依据全局地图占位信息建立2d网格占位地图;根据2d网格占位地图尺寸、分辨率建立对应大小的全局规划脉冲神经网络并部署在神经形态硬件上;利用了神经形态硬件和脉冲神经网络的并行计算特性,能够实现全局路径规划的快速性与最优性。
65、本发明根据全局最优路径获取局部目标位置信息,接收机器人采集的环境信息和机器人状态信息并处理转化为脉冲数据;将脉冲数据信息输入至局部规划脉冲深度神经网络输出控制指令,由机器人执行控制指令直至到达全局目标位置;基于神经形态硬件和使用强化学习方法训练的脉冲深度神经网络进行局部避障控制,避障实时性更好、复杂环境适应性更强。
66、本发明利用了神经形态硬件和脉冲神经网络的稀疏计算、事件驱动特性,大大降低了总计算量和总能耗。
- 还没有人留言评论。精彩留言会获得点赞!