一种四旋翼无人机分数阶抗饱和滑模控制方法及装置
本发明涉及四旋翼无人机分数阶抗饱和滑模控制,尤其涉及一种四旋翼无人机分数阶抗饱和滑模控制方法及装置。
背景技术:
1、四旋翼无人机在执行任务的过程中易受到本身模型、气动参数等内部干扰和阵风等外部环境干扰的影响,且当四旋翼无人机在运输较重物体或在恶劣环境下执行任务时,执行机构会受到物理约束的影响而无法生成足够的控制输入,导致性能降低甚至导致任务失败,这些多源干扰严重影响了轨迹跟踪的精度,因此,亟需一种四旋翼无人机以解决上述技术问题。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种四旋翼无人机分数阶抗饱和滑模控制方法及装置,能够提高四旋翼无人机在受到严重多源干扰时的轨迹跟踪精度。
2、为达到上述目的,本发明是采用下述技术方案实现的:
3、第一方面,本发明提供了一种四旋翼无人机分数阶抗饱和滑模控制方法,包括:
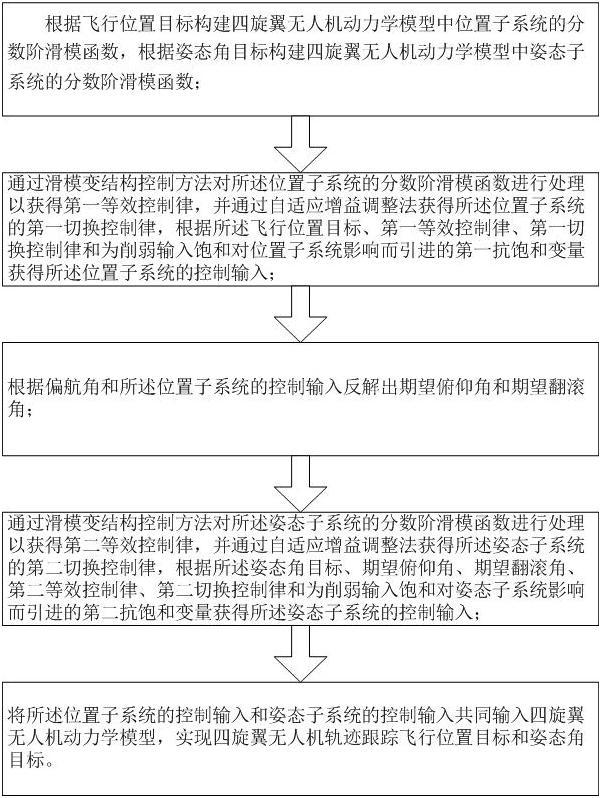
4、根据飞行位置目标构建四旋翼无人机动力学模型中位置子系统的分数阶滑模函数,根据姿态角目标构建四旋翼无人机动力学模型中姿态子系统的分数阶滑模函数;
5、通过滑模变结构控制方法对所述位置子系统的分数阶滑模函数进行处理以获得第一等效控制律,并通过自适应增益调整法获得所述位置子系统的第一切换控制律,根据所述飞行位置目标、所述第一等效控制律、所述第一切换控制律和为削弱输入饱和对位置子系统影响而引进的第一抗饱和变量获得所述位置子系统的控制输入;
6、根据偏航角和所述位置子系统的控制输入反解出期望俯仰角和期望翻滚角;
7、通过滑模变结构控制方法对所述姿态子系统的分数阶滑模函数进行处理以获得第二等效控制律,并通过自适应增益调整法获得所述姿态子系统的第二切换控制律,根据所述姿态角目标、期望俯仰角、期望翻滚角、第二等效控制律、第二切换控制律和为削弱输入饱和对姿态子系统影响而引进的第二抗饱和变量获得所述姿态子系统的控制输入;
8、将所述位置子系统的控制输入和姿态子系统的控制输入共同输入四旋翼无人机动力学模型,实现四旋翼无人机轨迹跟踪飞行位置目标和姿态角目标。
9、进一步地, 所述飞行位置目标用于使无人机位置误差收敛于0且保持稳定;
10、所述姿态角目标用于使无人机翻滚角、俯仰角和偏航角误差收敛于0且保持稳定。
11、进一步地,所述四旋翼无人机动力学模型为:
12、;
13、其中位置子系统为:
14、;
15、姿态子系统为:
16、;
17、虚拟控制输入为:
18、;
19、其中,分别为在轴的值,为翻滚角,为俯仰角,为偏航角,为机体质量,为重力加速度,为螺旋桨中心到重心的距离,,,分别为三个坐标方向上的空气阻力系数,,,分别为三个转动方向上的空气阻力系数,,,分别为机体绕,,轴的转动惯量;为位置子系统的控制输入,,,为姿态子系统的控制输入,控制无人机的垂直起降,控制无人机的翻滚通道,控制无人机的俯仰通道,控制无人机的偏航通道;,表示位置通道上的模型不确定部分,,表示姿态通道上的模型不确定部分;,表示在运动位置上所受的外界扰动,,表示在转动角度上所受的外界扰动,、、为所述四旋翼无人机在x方向,y方向和z方向上的虚拟控制输入。
20、进一步地,所述通过滑模变结构控制方法对所述位置子系统的分数阶滑模函数进行处理以获得第一等效控制律,并通过自适应增益调整法获得所述位置子系统的第一切换控制律,包括:
21、所述位置子系统的分数阶滑模函数包括:
22、;
23、其中,、、分别表示在x方向,y方向和z方向上的分数阶滑模函数,为正的常数增益,为分数阶的阶次,为常数阶次;表示分数阶函数,所述四旋翼无人机的实际位置坐标为,期望的位置坐标为, 均为位置跟踪误差;
24、在不考虑干扰的情况下,令分数阶滑模函数等于0可求得位置子系统的第一等效控制律,所述第一等效控制律包括:
25、;
26、其中,、、分别表示在x方向,y方向和z方向上的第一等效控制律;
27、通过自适应增益调整法估计所述位置子系统中模型不确定和扰动的未知上界,将所述未知上界的估计值代替所述位置子系统中实际的模型不确定和扰动的未知上界获得第一切换控制律:
28、;
29、其中,、、分别表示在x方向,y方向和z方向上的切换控制律,、为正常数增益,为趋近律的指数,为分数阶的阶次,为各通道不确定和扰动的未知上界的估计值,其遵循:
30、;
31、、、为别为x方向,y方向和z方向上的自适应律增益。
32、进一步地,根据所述飞行位置目标、所述第一等效控制律、所述第一切换控制律和为削弱输入饱和对位置子系统影响而引进的第一抗饱和变量获得所述位置子系统的控制输入包括:
33、所述第一抗饱和变量包括:
34、;
35、其中,为正常数增益,,;
36、所述位置子系统的控制输入:
37、;
38、。
39、进一步地,所述根据偏航角和所述位置子系统的控制输入反解出期望俯仰角和期望翻滚角包括:
40、。
41、进一步地,所述通过滑模变结构控制方法对所述姿态子系统的分数阶滑模函数进行处理以获得第二等效控制律,并通过自适应增益调整法获得所述姿态子系统的第二切换控制律,包括:
42、所述姿态子系统的分数阶滑模函数包括:
43、;
44、其中,、、分别表示在方向,方向和方向上的分数阶滑模函数,为正的常数增益,为分数阶的阶次,为常数阶次;表示分数阶函数,所述四旋翼无人机实际姿态角为,期望的姿态角为,均为姿态跟踪误差;
45、在不考虑干扰的情况下,令分数阶滑模函数等于0可求得姿态子系统的第二等效控制律,所述第二等效控制律包括:
46、;
47、其中,、、分别表示在x方向,y方向和z方向上的第二等效控制律;
48、通过自适应增益调整法估计所述姿态子系统中模型不确定和扰动的未知上界,将所述未知上界的估计值代替所述姿态子系统中实际的模型不确定和扰动的未知上界获得第二切换控制律:
49、;
50、其中,、、分别表示在方向,方向和方向上的切换控制律,为趋近律的指数,为正常数增益,为分数阶的阶次,为各通道模型不确定和扰动的未知上界的估计值,其遵循:
51、;
52、、、为方向,方向和方向上的自适应律增益。
53、进一步地,根据所述姿态角目标、期望俯仰角、期望翻滚角、第二等效控制律、第二切换控制律和为削弱输入饱和对姿态子系统影响而引进的第二抗饱和变量获得所述姿态子系统的控制输入包括:
54、所述第二抗饱和变量包括:
55、;
56、其中, 为正常数增益,,;
57、所述姿态子系统的控制输入:
58、。
59、进一步地,根据所述姿态子系统和位置子系统的控制输入构成的控制输入向量受输入饱和的限制,即
60、;
61、其中,是控制器的最大控制输入,是控制器的最小控制输入。
62、第二方面,本发明提供一种四旋翼无人机分数阶抗饱和滑模控制装置,包括:
63、获取模块:用于根据飞行位置目标构建四旋翼无人机动力学模型中位置子系统的分数阶滑模函数,根据姿态角目标构建四旋翼无人机动力学模型中姿态子系统的分数阶滑模函数;
64、位置子系统处理模块:用于通过滑模变结构控制方法对所述位置子系统的分数阶滑模函数进行处理以获得第一等效控制律,并通过自适应增益调整法获得所述位置子系统的第一切换控制律,根据所述飞行位置目标、所述第一等效控制律、所述第一切换控制律和为削弱输入饱和对位置子系统影响而引进的第一抗饱和变量获得所述位置子系统的控制输入;
65、反解模块:用于根据偏航角和所述位置子系统的控制输入反解出期望俯仰角和期望翻滚角;
66、姿态子系统处理模块:用于通过滑模变结构控制方法对所述姿态子系统的分数阶滑模函数进行处理以获得第二等效控制律,并通过自适应增益调整法获得所述姿态子系统的第二切换控制律,根据所述姿态角目标、期望俯仰角、期望翻滚角、第二等效控制律、第二切换控制律和为削弱输入饱和对姿态子系统影响而引进的第二抗饱和变量获得所述姿态子系统的控制输入;
67、跟踪模块:用于将所述位置子系统的控制输入和姿态子系统的控制输入共同输入四旋翼无人机动力学模型,实现四旋翼无人机轨迹跟踪飞行位置目标和姿态角目标。
68、与现有技术相比,本发明所达到的有益效果:
69、基于分数阶控制理论,分别构造位置子系统和姿态子系统的分数阶滑模函数,通过自适应增益调整法来估计模型不确定和外界扰动的未知上界,以此来抵消无人机模型中的集总干扰,再通过获取辅助动力系统来补偿输入饱和的影响,提高四旋翼无人机轨迹跟踪性能,实现稳定快速的四旋翼无人机轨迹跟踪;
70、分数阶滑模函数在减少了系统的抖振的同时,满足了四旋翼无人机轨迹跟踪对控制输入的精度要求;
71、通过自适应增益调整法来估计模型不确定和扰动的未知上界,估计值根据无人机的运动状态实时更新,提高了整个系统的稳定性与鲁棒性;
72、动态辅助系统可以有效补偿输入饱和的影响,使得设计的控制器满足实际执行器的物理约束,更加符合实际情况。
- 还没有人留言评论。精彩留言会获得点赞!