旋翼无人机弹射起飞控制方法和装置与流程
本发明涉及旋翼无人机,具体涉及一种旋翼无人机弹射起飞控制方法和装置。
背景技术:
1、无人机弹射起飞控制用于无人机在大过载、高动态弹射过程中的状态稳定与状态过渡控制,通过舵面和动力控制,保持飞机姿态、空速、高度等飞行状态可控,实现无人机从弹射前状态平稳过渡到正常巡航状态的目标。
2、目前旋翼无人机通常采用低成本的惯性传感芯片,该类芯片的最大过载检测通常不超过5倍的重力加速度。但弹射通常要求不低于50倍重力加速度的过载。这导致在位姿计算时会出现异常情况,无法满足旋翼无人机的控制。
3、弹射无人机通常安装的空间狭小,因此,无人机在起飞前无法获得卫星导航数据,而卫星导航接收机通常需要15s以上的时间进行对准。这导致无人机弹射升空后依旧处于无定位数据的状态,无法实现无人机位置控制。
4、专利cn109634296a-基于鲁棒伺服控制理论的小型无人机弹射起飞控制系统及方法中提出了弹射起飞无人机的控制方法。但该方法前提是获得准确的无人机位姿信息。
5、专利cn109436363b-一种针对大过载、折叠翼式无人机的弹射起飞控制方法中提出了折叠固定翼弹射我人机的控制方法,由于固定翼具有姿态稳定的气动特点,在无位姿信息下,通过机体启动特点可以实现自稳定飞行,而旋翼无人机在无位置速度信息时无法实现稳定控制。
技术实现思路
1、鉴于上述问题,提出了本发明以便提供一种克服上述问题或者至少部分地解决上述问题的旋翼无人机弹射起飞控制方法。
2、依据本发明的一个方面,提供了一种旋翼无人机弹射起飞控制方法,所述方法包括:
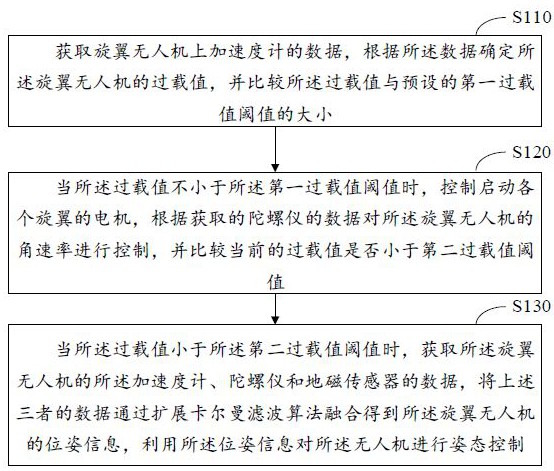
3、获取旋翼无人机上加速度计的数据,根据所述数据确定所述旋翼无人机的过载值,并比较所述过载值与预设的第一过载值阈值的大小;
4、当所述过载值不小于所述第一过载值阈值时,控制启动各个旋翼的电机,根据获取的陀螺仪的数据对所述旋翼无人机的角速率进行控制,并比较当前的过载值是否小于第二过载值阈值;
5、当所述过载值小于所述第二过载值阈值时,获取所述旋翼无人机的所述加速度计、陀螺仪和地磁传感器的数据,将上述三者的数据通过扩展卡尔曼滤波算法融合得到所述旋翼无人机的位姿信息,利用所述位姿信息对所述无人机进行姿态控制。
6、在一些实施方式中,在所述获取旋翼无人机上加速度计的数据之前,所述方法还包括:
7、检测所述旋翼无人机是否上电,在确认上电后根据预设的项目清单进行自检。
8、在一些实施方式中,所述控制启动各个旋翼的电机包括:
9、设定或者预先设定所述电机的悬停油门。
10、在一些实施方式中,所述根据获取的陀螺仪的数据对所述旋翼无人机的角速率进行控制包括:
11、根据所述陀螺仪的数据确定所述旋翼无人机的旋转角或者角加速度;
12、当所述旋转角或者角加速度大于预设的阈值时,控制所述旋翼无人机的所述电机驱动参数,使得所述旋翼无人机向相反的角度进行旋转,从而对所述角速率进行控制。
13、在一些实施方式中,所述过载值、所述第一过载值阈值和所述第二过载值阈值为所述旋翼无人机在垂直地面方向上的加速度值。
14、在一些实施方式中,所述方法进一步包括:
15、比较当前过载值是否小于第三过载值阈值;
16、当所述过载值小于所述第三过载值阈值时,获取所述旋翼无人机的所述加速度计、陀螺仪、地磁传感器和定位传感器的数据,将上述四者的数据通过扩展卡尔曼滤波算法融合得到所述旋翼无人机的位姿信息。
17、在一些实施方式中,所述方法还包括:
18、预先将所述旋翼无人机弹射起飞划分为如下至少一种阶段:等待弹射、弹射出桶、快速上升、平稳上升、稳定悬停;
19、其中,各所述阶段的判定是根据所述旋翼无人机的加速度计确定的过载值与各阶段的预设阈值进行比较,然后根据比较的结果确定的。
20、依据本发明的另一方面,提供了一种旋翼无人机弹射起飞控制装置,由旋翼无人机的飞行控制器执行,所述装置包括:
21、比较模块,适于获取旋翼无人机上加速度计的数据,根据所述数据确定所述旋翼无人机的过载值,并比较所述过载值与预设的第一过载值阈值的大小;
22、控制模块,适于当所述过载值不小于所述第一过载值阈值时,控制启动各个旋翼的电机,根据获取的陀螺仪的数据对所述旋翼无人机的角速率进行控制,并比较当前的过载值是否小于第二过载值阈值;
23、融合模块,适于当所述过载值小于所述第二过载值阈值时,获取所述旋翼无人机的所述加速度计、陀螺仪和地磁传感器的数据,将上述三者的数据通过扩展卡尔曼滤波算法融合得到所述无人机的位姿信息,利用所述位姿信息对所述无人机进行姿态控制。
24、依据本发明的又一方面,提供了一种旋翼无人机,包括:处理器以及被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述处理器执行根据上述实施方式中任一项所述的旋翼无人机弹射起飞控制方法。
25、依据本发明的再一方面,提供了一种计算机可读存储介质,其中,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被处理器执行时,实现根据上述中任一项旋翼无人机弹射起飞控制方法。
26、由上述可知,根据本发明公开的旋翼无人机弹射起飞控制方法,通过该技术方案,可以有效克服在大过载下的旋翼无人机起飞的可靠性。
27、进一步的,上述技术方案采用加速度计的判定无人机的过载值和阶段状态,从而根据不同的过载值确定不同的阶段,并确定了旋翼无人机中多传感器进行融合的条件;根据多个不同传感器融合的结果,通过控制环路的自动切换实现弹射起飞控制;本发明能够有效解决旋翼无人机在大过载的情况下,加速度计数据出现异常而导致的扩展卡尔曼滤波算法(ekf)融合结果发散,进而导致的旋翼无人机的位置和姿态输出异常的问题。
28、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
技术特征:
1.一种旋翼无人机弹射起飞控制方法,由旋翼无人机的飞行控制器执行,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,在所述获取旋翼无人机上加速度计的数据之前,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,所述控制启动各个旋翼的电机包括:
4.根据权利要求1-3中任一项所述的方法,其特征在于,所述根据获取的陀螺仪的数据对所述旋翼无人机的角速率进行控制包括:
5.根据权利要求1-3中任一项所述的方法,其特征在于,所述过载值、所述第一过载值阈值和所述第二过载值阈值为所述旋翼无人机在垂直地面方向上的加速度值。
6.根据权利要求1-3中任一项所述的方法,其特征在于,所述方法进一步包括:
7.根据权利要求1-3中任一项所述的方法,其特征在于,所述方法还包括:
8.一种旋翼无人机弹射起飞控制装置,由旋翼无人机的飞行控制器执行,所述装置包括:
9.一种旋翼无人机,其特征在于,包括处理器以及被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述处理器执行根据权利要求1-7中任一项所述的旋翼无人机弹射起飞控制方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被处理器执行时,实现根据权利要求1-7中任一项所述的旋翼无人机弹射起飞控制方法。
技术总结
本发明公开了一种旋翼无人机弹射起飞控制方法和装置,所述方法包括:获取旋翼无人机上加速度计的数据,根据所述数据确定旋翼无人机的过载值,并比较过载值与预设的第一过载值阈值的大小;当过载值不小于所述第一过载值阈值时,控制启动各个旋翼的电机,根据获取的陀螺仪的数据对旋翼无人机的角速率进行控制,并比较当前的过载值是否小于第二过载值阈值;当过载值小于所述第二过载值阈值时,获取旋翼无人机的所述加速度计、陀螺仪和地磁传感器的数据,将上述三者的数据通过扩展卡尔曼滤波算法融合得到旋翼无人机的位姿信息,并利用位姿信息对所述无人机进行姿态控制。上述方案能够保证大过载下旋翼无人机起飞的可靠性。
技术研发人员:任雪峰,白云浩,彭铁欣,崔高胜,魏晓芳,张雪飞
受保护的技术使用者:北京卓翼智能科技有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!