传送晶圆的机械手臂及晶圆清洗装置的制作方法
[0001]
本发明是关于一种传送晶圆的机械手臂及晶圆清洗装置。
背景技术:
[0002]
制造半导体电路是涉及数种不同的工艺,包含薄膜沉积工艺、微影工艺、蚀刻工艺、清洗工艺以及平坦化工艺。举例来说,使用沉积工艺在基板上沉积薄膜。接着,使用微影工艺在薄膜上图案化具有特定线路图案的光阻。之后,使用蚀刻工艺将线路图案从光阻转移至薄膜或基板上。清洗工艺经常使用于薄膜、微影、蚀刻及平坦化等步骤之前、中、后等时机,用以维持半导体基板在生产过程中的表面洁净度。
[0003]
目前的晶圆清洗装置是以自动化的基板载具将基板传送至数个清洗槽内,并以不同的清洗液冲洗附着于基板上污染物。举例来说,在第一个清洗槽中,使用去离子水清洗基板上污染物。之后,再将清洗后的基板以机械手臂传送至另一个清洗槽中,以进行第二清洗液的工艺。然而,上述的晶圆清洗装置中,当基板以机械手臂传送至下一个清洗槽的过程中或基板闲置于机台上,例如,晶圆因机械手臂当机而在机械手臂上闲置过久,容易因为基板上清洗液的过早干燥而在基板上形成水印。所述的水印易导致后续工艺步骤上的缺陷,进而造成产品的不合格率的增加。
[0004]
有鉴于此,目前亟需一种崭新的传送晶圆的机械手臂及晶圆清洗装置,以解决上述因过早干燥而在基板上生成水印的问题。
技术实现要素:
[0005]
在本发明的实施例中,提出一种传送晶圆的机械手臂及晶圆清洗装置。在此公开的传送晶圆的机械手臂具有防止晶圆过早干燥的功能。
[0006]
在本发明的实施例中,一种传送晶圆的机械手臂包括基体、第一手臂、第二手臂、多个第一喷嘴以及多个第二喷嘴。第一手臂及第二手臂连接于基体的底部。第一手臂与第二手臂相对设置,用以夹取沿一个方向排列的多个晶圆。第一喷嘴设于第一手臂或基体上,第二喷嘴设于第二手臂或基体上。
[0007]
在本发明的一实施例中,第一喷嘴的数量为25-50个。
[0008]
在本发明的一实施例中,第二喷嘴的数量为25-50个。
[0009]
在本发明的一实施例中,第一喷嘴设置在第一手臂上,且沿着所述方向间隔地设置。
[0010]
在本发明的一实施例中,第二喷嘴设置在第二手臂上,且沿着所述方向间隔地设置。
[0011]
在本发明的一实施例中,传送晶圆的机械手臂,还包括多个第三喷嘴,所述第三喷嘴沿着所述方向间隔地设置在基体的底部上。
[0012]
在本发明的一实施例中,传送晶圆的机械手臂还包括多个第一止挡部及多个第二止挡部。所述多个第一止挡部及多个第二止挡部分别设置于第一手臂及第二手臂的内侧,
用以间隔晶圆。各第一止挡部以一定间距间隔以及各第二止挡部以所述间距间隔。
[0013]
在本发明的一实施例中,第一喷嘴及第二喷嘴被配制成喷雾地向晶圆提供去离子水。
[0014]
在本发明的一实施例中,一种晶圆清洗装置,包括槽体、多个工艺腔室、上述的传送晶圆的机械手臂以及多个承接台。各腔室被配制成容置工艺流体。所述传送晶圆的机械手臂,可移动地设置在多个腔室上方,以在多个腔室之间传送多个晶圆。所述多个承接台,分别设于多个腔室内。各承接台被配制成向上移动接收第一手臂与第二手臂之间的所述多个晶圆。
[0015]
在本发明的一实施例中,多个工艺腔室包括第一腔室、第二腔室以及第三腔室。第一腔室被配制成容置第一工艺流体,用以移除晶圆上的有机物。第二腔室被配制成容置第二工艺流体,用以移除晶圆上的无机物。第三腔室被配制成容置第三工艺流体,用以干燥晶圆。
[0016]
与现有技术相比,传送晶圆的机械手臂及晶圆清洗装置,其能够避免因过早干燥而在基板上生成水印的问题。
[0017]
以下将以实施方式对上述的说明做详细的描述,并对本发明的技术方案提供更进一步的解释。
附图说明
[0018]
为使本发明的上述和其他目的、特征、优点与实施例能更明显易懂,请详阅以下的详细叙述并搭配对应的附图。
[0019]
图1是根据本发明的某些实施例的传送晶圆的机械手臂及晶圆清洗装置的示意图。
[0020]
图2是根据本发明的某些实施例的传送晶圆的机械手臂及晶圆清洗装置的示意图。
[0021]
图3a图3b是根据本发明的某些实施例的传送晶圆的机械手臂及晶圆清洗装置的示意图。
[0022]
图4a至图4c是根据本发明的某些实施例的传送晶圆的机械手臂的示意图。图4d是根据本发明的某些实施例的传送晶圆的机械手臂的俯视透视图。
[0023]
图5是根据本发明的某些实施例的传送晶圆的机械手臂的示意图。
[0024]
图6a至图6b是根据本发明的某些实施例的传送晶圆的机械手臂的侧视示意图。图6c是根据本发明的某些实施例的传送晶圆的机械手臂的俯视透视图。
[0025]
主要附图标记说明:
[0026]
10-晶圆,100-晶圆清洗装置,200-槽体,201、202、203-腔室,210、211、212-承接台,300-去离子水,400-机械手臂,401-第一手臂,402-第二手臂,404-基体,601、602、603-喷嘴,701-第一止挡部,702-第二止挡部。
具体实施方式
[0027]
在实施方式与权利要求中,除非内文中对于冠词有所特别限定,否则“一”与“该”可泛指单一个或复数个。
[0028]
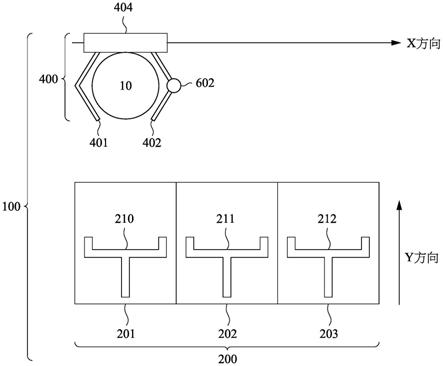
图1及图2是根据本发明的某些实施例的传送晶圆的机械手臂以及晶圆清洗装置的示意图。如图1所示,晶圆清洗装置100包括槽体200以及传送晶圆的机械手臂400。机械手臂400设置于槽体200的上方,用以夹取沿一个方向排列的多个晶圆10。机械手臂400可在槽体200的上方水平地沿方向x移动,以传送晶圆10至槽体200的上方的不同的位置,如图1及图2所示。
[0029]
根据本发明的一些实施方式,参见图1,传送晶圆的机械手臂400包括基体404、第一手臂401及第二手臂402。第一手臂401及第二手臂402连接于基体404的底部。第一手臂401及第二手臂402相对地设置,用以夹取沿一个方向排列的多个晶圆10。
[0030]
根据本发明的一些实施方式,参见图2,第一手臂401夹取多个晶圆10的一侧边,而第二手臂402夹取多个晶圆10的相对侧边,使得晶圆10位于第一手臂401与第二手臂402之间。被夹取的多个晶圆10沿一个方向排列,且相邻两晶圆10之间以一定间距间隔。在一些实施例中,被夹取的晶圆10的数目为25-50个。在一些实施例中,被夹取的晶圆10的数目为25-35个。
[0031]
根据本发明的一些实施方式,参见图1,槽体200设有多个工艺腔室。各工艺腔室被配制成容置或提供工艺流体。例如,使用所述工艺流体以清洗或干燥晶圆10,借此除去工艺中所附在晶圆10上的微粒、有机物污染物以及无机污染物。例如,机台腔室中的微粒在晶圆上沉降所导致的微粒。例如,蚀刻后产生的光阻残渣在晶圆上所导致的有机物污染物。例如,平坦化操作后(例如化学机械研磨,cmp),其研磨液中的金属离子、金属微粒残留在晶圆上所导致的无机污染物。在一些实施例中,腔室包括第一腔室201、第二腔室202以及第三腔室203。第一腔室201被配制成容置第一工艺流体,用以移除晶圆上的有机物。第二腔室202被配制成容置第二工艺流体,用以移除晶圆上的无机物。第三腔室203被配制成容置第三工艺流体,用以干燥晶圆。在一些实施例中,第一工艺流体可为稀hf溶液。在一些实施例中,第一工艺流体可为nh4oh、h2o2、h2o或上述组合。在一些实施例中,第二工艺流体可为去离子水。在一些实施例中,第三工艺流体可为hcl、h2o2、h2o或上述组合。在一些实施例中,第三工艺流体可为h2so4、h2o2、h2o或上述组合。在一些实施例中,第三工艺流体可为异丙醇(ipa)、h2o或上述组合。在一些实施例中,第三工艺流体可为氮气、空气、氩气或上述组合。在一些实施例中,工艺流体包括氢氧化四甲铵(tmah)溶液。在一些实施例中,槽体200包括三个以上的腔室。
[0032]
根据本发明的一些实施方式,参见图1及图2,机械手臂400夹取沿一个方向排列的多个晶圆10,并且在多个腔室上方移动。在一些实施例中,机械手臂400将晶圆10从第一腔室201上方传送至第二腔室202上方。在一些实施例中,机械手臂400晶圆10从第二腔室202上方传送至第三腔室203上方。在一些实施例中,机械手臂400晶圆10从第一腔室201上方传送至第三腔室203上方。
[0033]
图3a及图3b是根据本发明的某些实施例的传送晶圆的机械手臂以及晶圆清洗装置的示意图。参见图2,多个承接台210、211、212,分别设于工艺腔室201、202、203中。当传送晶圆的手臂400夹取多个晶圆10水平地移动(沿着方向x)至第一腔室201上方,第一承接台210向上移动(沿着方向y)接收机械手臂400的第一手臂401及第二手臂402之间的多个晶圆10。之后,第一承接台210向下移动(沿着方向y的相反方向),将所承载的晶圆10置入第一腔室201内。第一腔室201被配制成容置第一工艺流体,用以处理晶圆10。晶圆在第一腔室201
完成所述的清洗或干燥工艺后,第一承接台210向上移动,其承载的晶圆10被机械手臂400夹取。接着,机械手臂400水平地(沿方向x)移动至第三腔室203(或第二腔室202)上方。第三承接台212(或第二承接台211)向上移动接收机械手臂400的第一手臂401及第二手臂402之间的多个晶圆10。接着,第三承接台212(或第二承接台211)向下移动,将晶圆10置入第三腔室203(或第二腔室202)内。第三腔室203(或第二腔室202)被配制成容置第三(或第二)工艺流体,用以清洗或干燥晶圆10。
[0034]
图4a至图4c是根据本发明的某些实施例的传送晶圆的机械手臂的示意图。图4d是根据本发明的某些实施例的传送晶圆的机械手臂的俯视透视图。参见图4b,第一喷嘴601设置在第一手臂401上(或基体404)上,且沿着晶圆排列的方向间隔地设置。第二喷嘴602设置在第二手臂402上或基体404上,且沿着晶圆10排列的方向间隔地设置,如图4c所示。在一些实施例中,第一喷嘴601的数量为25-50个,以及第二喷嘴602的数量为25-50个。在一些实施例中,第一喷嘴601的数量等于第二喷嘴602的数量。
[0035]
图5是根据本发明的某些实施例的传送晶圆的机械手臂的示意图。第一喷嘴601被配制成喷雾地向晶圆10提供去离子水。第二喷嘴602被配制成喷雾地向晶圆10提供去离子水如。当机械手臂在传送晶圆10时,因为出于非预期的状况下(例如,因机械手臂当机而导致晶圆在机械手臂上闲置过久),晶圆10在大气环境中闲置而无法前往下一个腔室进行清洗工艺。此时,第一喷嘴601及第二喷嘴602可以喷雾地向晶圆10提供去离子水300。雾化的去离子水300可以润湿晶圆10的表面及/或背面,且雾化的去离子水300可以在晶圆表面(正面或背面)形成水膜以防止晶圆10表面在传送过程中的干燥。此干燥现象会造成晶圆10上水印的形成,其导致后续工艺的污染来源,亦导致不合格率的上升。
[0036]
参见图5、图4a及图4d,根据本发明的一些实施方式,传送晶圆的机械手臂还包括多个第三喷嘴603,被配制成喷雾地向该晶圆10提供去离子水。第三喷嘴603沿着晶圆10排列的方向间隔地设置在基体404的底部上。在一些实施例中,第三喷嘴603的数量为25-50个。在一些实施例中,第三喷嘴603的数量等于第一喷嘴601及/或第二喷嘴602的数量等于。当机械手臂在传送晶圆时,因为非出于预期的状况下(例如,因机械手臂当机而导致晶圆在机械手臂上闲置过久),晶圆在大气环境中闲置而无法往下一个腔室进行清洗工艺。此时,第三喷嘴603喷雾地向晶圆提供去离子水。
[0037]
图6a及图6b是根据本发明的某些实施例的传送晶圆的第一手臂401及第二手臂402的侧视示意图。图6c是根据本发明的某些实施例的传送晶圆的机械手臂的俯视透视图。参见图6a,传送晶圆的机械手臂还包括多个第一止挡部701,设置于第一手臂401内侧。传送晶圆的机械手臂还包括多个第二止挡部702,设置于第二手臂402内侧,如图6b所示。第一止挡部701用以止挡晶圆10的一侧边,而第二止挡部702用以止挡晶圆10的另一侧边。如图6c所示,各第一止挡部701以一定间距间隔,而且各第二止挡部702以相同的间距间隔,使得多个晶圆10被固定在第一止挡部701与第二止挡部702所界定的空间中。在一些实施例中,第一止挡部的数量为25-60个。在一些实施例中,第二止挡部的数量为25-60个。在一些实施例中,第一止挡部的数量等于第二止挡部的数量。
[0038]
虽然本发明已以实施方式发明如上,然其并非用以限定本发明,任何所属领域的技术人员,在不脱离本发明的精神和范围内,当可作各种的变动与润饰,因此本发明的保护范围当视权利要求及其均等方案所界定的为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1