一种全封闭组合电器的刀闸操作位置异常修正装置的制作方法
1.本发明涉及继电保护技术领域,尤其涉及一种全封闭组合电器的刀闸操作位置异常修正装置。
背景技术:
2.全封闭组合电器因占地面积小的特点,使得其在现代电网中大量应用。全封闭组合电器的刀闸的分合闸位置是否到位,影响着设备的可靠运行。
3.目前,全封闭组合电器的刀闸分合闸位置的操作是通过电动操作机构来实现,但完成操作后的分合闸指示仅表明操作机构完成分合闸动作而已,却不能全面的反映刀闸本体的分合闸位置,一旦操作过程中控制微动开关的位置出现差异,容易造成刀闸的合闸异常,给设备运行带来安全隐患。
4.如图1所示,为现有全封闭组合电器的刀闸操作结构。该全封闭组合电器的刀闸操作结构将组合电器及刀闸安装在全封闭外壳1
/
中,利用安装在全封闭外壳1
/
外侧壁所设拐臂基座2
/
上并通过传动轴5
/
伸入全封闭外壳1
/
内部连接刀闸的刀闸传动拐臂3
/
与电动操作机构进行配合,实现刀闸的分合闸控制。其中,电动操作机构的传动拉杆通过拉杆安装孔4
/
与刀闸传动拐臂3
/
进行连接,并通过传动拉杆拉动刀闸传动拐臂3
/
完成刀闸的分合闸操作。如果刀闸传动拐臂3
/
操作不到位,在现场难于发现微小差异,使得该刀闸传动拐臂3
/
的指向位置无法全面的反映刀闸本体的操作位置。
5.因此,为确保刀闸分合闸操作后本体位置无异常,有必要提供一种刀闸操作位置异常修正装置,以确保设备的正常运行
技术实现要素:
6.本发明实施例所要解决的技术问题在于,提供一种全封闭组合电器的刀闸操作位置异常修正装置,通过对刀闸本体位置的精确指示,实现修正刀闸本体异常位置的功能,确保了设备的正常运行。
7.为了解决上述技术问题,本发明实施例提供了一种全封闭组合电器的刀闸操作位置异常修正装置,包括全封闭式壳体及其外部所设的拐臂基座和刀闸传动拐臂,还包括:均设置于所述全封闭式壳体外部的标示基座和套筒;其中,
8.所述标示基座为卡持于所述拐臂基座外表面上的开口环,其上设有分闸位指示标和合闸位指示标;
9.所述套筒的外表面上设有一指针,内表面套设于所述刀闸传动拐臂所连刀闸的传动轴的外表面上并与所述传动轴相固定后随所述传动轴同步转动;其中,所述指针的转动范围位于所述分闸位指示标和所述合闸位指示标之间;
10.其中,在所述刀闸完成分闸操作后,所述指针、所述分闸位指示标及所述刀闸的实际分闸位三者在所述全封闭式壳体上的垂直投影均处于同一直线上;在所述刀闸完成合闸操作后,所述指针、所述合闸位指示标及所述刀闸的实际合闸位三者在所述全封闭式壳体
上的垂直投影均处于同一直线上。
11.其中,所述标示基座为u型开口环,通过螺丝固定于所述拐臂基座的外表面上。
12.其中,所述分闸位指示标和所述合闸位指示标均设置于所述标示基座朝向所述刀闸传动拐臂的一侧端面上,且二者均为贴条;其中,两个贴条的颜色相异。
13.其中,两个所述贴条均通过不干胶粘贴于所述标示基座上。
14.其中,两个所述贴条之间形成的夹角为60度、70度或80度。
15.其中,所述套筒通过螺丝固定于所述传动轴的外表面上。
16.其中,所述指针通过螺丝固定于所述套筒的外表面上。
17.其中,所述全封闭式壳体、所述拐臂基座、所述刀闸传动拐臂、所述标示基座和所述套筒均采用绝缘材料制作而成。
18.实施本发明实施例,具有如下有益效果:
19.本发明在刀闸完成分闸操作后,通过指针、分闸位指示标及刀闸的实际分闸位在全封闭式壳体上的垂直投影均处于同一直线上,以及在刀闸完成合闸操作后,通过指针、合闸位指示标及刀闸的实际合闸位三者在全封闭式壳体上的垂直投影均处于同一直线上,实现对刀闸本体位置的精确指示,以确保对刀闸本体异常位置的修正,确保了设备的正常运行。
附图说明
20.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,根据这些附图获得其他的附图仍属于本发明的范畴。
21.图1为现有全封闭组合电器的刀闸操作结构的立体图;
22.图2为本发明实施例提供的一种全封闭组合电器的刀闸操作位置异常修正装置的立体图;
23.图3为本发明实施例提供的一种全封闭组合电器的刀闸操作位置异常修正装置的局部放大图;
24.图4为本发明实施例提供的一种全封闭组合电器的刀闸操作位置异常修正装置与控制输出装置进行配合的工作原理图。
具体实施方式
25.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。
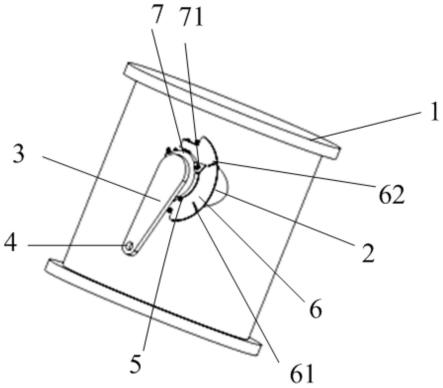
26.如图2和图3所示,为本发明实施例中,提出的一种全封闭组合电器的刀闸操作位置异常修正装置,包括采用绝缘材料制作而成的全封闭式壳体1,该全封闭式壳体1内部安装有组合电器(未图示)及其配合的刀闸(未图示),外部设有均采用绝缘材料制作而成的拐臂基座2和刀闸传动拐臂3;其中,刀闸传动拐臂3安装在全封闭外壳1外侧壁所设拐臂基座2上并通过传动轴5伸入全封闭外壳1内部连接刀闸(未图示),该刀闸传动拐臂3设有拉杆安装孔4,使得电动操作机构的传动拉杆通过拉杆安装孔4与刀闸传动拐臂3进行连接,并拉动
刀闸传动拐臂3完成刀闸的分合闸操作,实现刀闸的分合闸控制。
27.此时,该全封闭组合电器的刀闸操作位置异常修正装置还包括:均设置于全封闭式壳体1外部的标示基座6和套筒7,标示基座6和套筒7均采用绝缘材料制作而成;其中,
28.标示基座6为卡持于拐臂基座2外表面上的开口环,其上设有分闸位指示标61和合闸位指示标62;其中,该标示基座6为u型开口环,通过螺丝固定于拐臂基座2的外表面上;分闸位指示标61和合闸位指示标62均设置于标示基座6朝向刀闸传动拐臂3的一侧端面上,且二者均为贴条;两个贴条的颜色相异,且两个贴条均通过不干胶粘贴于标示基座6上;
29.套筒7的外表面上设有一指针71并通过螺丝进行固定,内表面套设于刀闸传动拐臂3所连刀闸的传动轴5的外表面上并通过螺丝与传动轴5相固定后随传动轴同步转动;其中,指针71的转动范围位于分闸位指示标61和合闸位指示标62之间,即指针71的转动范围位于两个贴条之间形成的夹角范围;应当说明的是,根据设备特性设计夹角范围为60度、70度或80度等;
30.其中,在刀闸完成分闸操作后,指针71、分闸位指示标61及刀闸的实际分闸位三者在全封闭式壳体1上的垂直投影均处于同一直线上,即三者在同一空间平面上;在刀闸完成合闸操作后,指针71、合闸位指示标62及刀闸的实际合闸位三者在全封闭式壳体上1的垂直投影均处于同一直线上,即三者在同一空间平面上。
31.可以理解的是,指针71与标示基座6上的分闸位指示标61及合闸位指示标62配合,联动刀闸的“通”、“断”动作,从而实现刀闸本体行程与电信号的转换。
32.如图4所示,对本发明实施例提供的一种全封闭组合电器的刀闸操作位置异常修正装置与控制输出装置进行配合的工作原理图。图4中,ck1为分闸位置状态开关;ck2为合闸位置状态开关;ck3为过渡位置状态开关;fr为热偶继电器(fr1为断电器动作输出接点);hr为信号输出端子;ct为电机电流互感器(ct1为电流互感器输出端口);m为刀闸设备电机。
33.其中,本发明实施例提供的一种全封闭组合电器的刀闸操作位置异常修正装置的指针指到“合闸位置”、“分闸位置”、“过渡位置”时分别导通“ck1”、“ck2”、“ck3”三个滑动开关,反之滑动开关打开,从而为刀闸本体的到位情况提供了电信号判据,为修正控制提供位置情况数据。应当说明的是,过渡位置为从合闸位置到分闸位置之间的行程称过渡位置。
34.其中,控制输出装置通过接收“本体位置指示装置”的数据进行判断并输出正反向电压电流控制电机正反向运动,使刀闸本体操作到位。
35.该全封闭组合电器的刀闸操作位置异常修正装置与控制输出装置进行配合的控制逻辑原理如下:
36.1、当ck1由“1”变“0”后,ck2为“1”,ct电流为“0”,则输出端子输出正向电流,控制电机继续运转,直到ck3转为“1”停止;
37.2、当ck3由“1”变“0”后,ck2为“1”,ct电流为“0”,则输出端子输出反向电流,控制电机继续运转,直到ck1转为“1”停止;
38.3、当fr热偶继电器动作时,fr1为“1”,停止电机电流输出,发操作电机故障信号。
39.实施本发明实施例,具有如下有益效果:
40.本发明在刀闸完成分闸操作后,通过指针、分闸位指示标及刀闸的实际分闸位在全封闭式壳体上的垂直投影均处于同一直线上,以及在刀闸完成合闸操作后,通过指针、合闸位指示标及刀闸的实际合闸位三者在全封闭式壳体上的垂直投影均处于同一直线上,实
现对刀闸本体位置的精确指示,以确保对刀闸本体异常位置的修正,确保了设备的正常运行。
41.以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1