一种液压支架工件全自动焊接生产线的制作方法
1.本发明涉及液压支架工件焊接领域,具体涉及一种液压支架工件全自动焊接生产线。
背景技术:
2.液压支架工件应用范围广泛,而在现有的液压支架工件焊接工艺中,一共可分为三序焊接,每个焊接工序都需要人工组对-焊接-预热频繁周转。人工需要在各个站点之间频繁的运输周转,而采用人工操作,存在安全隐患、工作效率低、生产成本高的问题。
技术实现要素:
3.鉴于上述问题,提出了本发明以便提供一种克服上述问题或者至少部分地解决上述问题的液压支架工件全自动焊接生产线。
4.依据本发明的一个方面,提供了一种液压支架工件全自动焊接生产线,包括:
5.自动搬运物流线;
6.预热炉,用于对液压支架工件进行预热;
7.上下料工位,用于放置预热后的液压支架工件;
8.至少一个机器人自动焊接工作站,设置于所述自动搬运物流线上,用于对预热后的液压支架工件焊接;
9.子母运输车,用于各工位之间液压支架工件的输送。
10.可选的,所述上下料工位上设置有定位装置,该定位装置能够对液压支架工件进行定位。
11.可选的,所述子母运输车上设有举升装置,该举升装置能够驱动液压支架工件上下移动。
12.可选的,所述机器人自动焊接工作站包括三轴天轨,所述三轴天轨上安装有焊接机器人,并且所述焊接机器人能够沿三轴天轨移动。
13.可选的,所述机器人自动焊接工作站还设有变位机装置,所述变位机装置包括对称设置的两个变位机升降轴,所述变位机升降轴底部设有变位机行走轴,所述的两个变位机升降轴之间设有翻转架,该翻转架的端部通过变位机翻转轴与变位机升降轴连接。
14.可选的,所述自动搬运物流线包括主轨和子轨,所述子母运输车包括能够在主轨上移动的母车和能够在子轨上移动的子车。
15.可选的,所述的主轨和子轨垂直设置。
16.可选的,所述母车和子车上均安装有安全距离检测装置。
17.可选的,所述液压支架工件全自动焊接生产线还包括滑触线,所述子母运输车通过伺服电机驱动,且所述滑触线为伺服电机供电。
18.可选的,所述滑触线的铺设方向分别与主轨和子轨平行。
19.由上述可知,本发明的技术方案,提供了一种液压支架工件全自动焊接生产线,包
括自动搬运物流线、预热炉、上下料工位和机器人自动焊接工作站,而各个站点之间通过子母运输车进行输送,整体自动化操作,能够有效克服现有技术中采用人工操作存在安全隐患、工作效率低、生产成本高的问题。
附图说明
20.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
21.图1示出了现有技术中液压支架工件生产线中三序焊接的流程示意图
22.图2示出了根据本发明一个实施例的一种液压支架工件全自动焊接生产线中机器人自动焊接工作站的结构示意图;
23.图3示出了根据本发明一个实施例的一种液压支架工件全自动焊接生产线中定位示意图;
24.图4示出了根据本发明一个实施例的一种液压支架工件全自动焊接生产线中三轴天轨的结构示意图;
25.图5示出了根据本发明一个实施例的一种液压支架工件全自动焊接生产线中变位机装置的结构示意图;
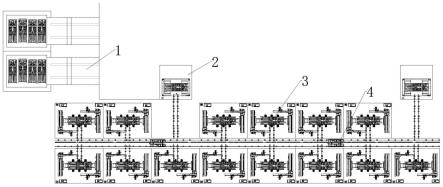
26.图6示出了根据本发明一个实施例的一种液压支架工件全自动焊接生产线的结构示意图;
27.图7示出了根据本发明一个实施例的一种液压支架工件全自动焊接生产线中机器人自动焊接工作站的工件上料示意图;
28.图8示出了根据本发明一个实施例的一种液压支架工件全自动焊接生产线中机器人自动焊接工作站的工件下料示意图;
29.图9示出了根据本发明一个实施例的一种液压支架工件全自动焊接生产线中两个rgv小车在机器人自动焊接工作站与上下料工位之间的第一行进路线图;
30.图10示出了根据本发明一个实施例的一种液压支架工件全自动焊接生产线中两个rgv小车在机器人自动焊接工作站与上下料工位之间的第二行进路线图;
31.附图标记:1-预热炉;2-上下料工位;3-机器人自动焊接工作站;4-子母运输车;5-变位机装置;6-三轴天轨;7-焊接机器人;501-变位机升降轴;502-变位机行走轴;503-翻转架;504-变位机翻转轴;8-主轨;9-子轨;10-滑触线。
具体实施方式
32.下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
33.图1示出了现有技术中液压支架工件生产线中三序焊接的流程示意图;
34.如图1所示,所述液压支架工件生产线的工艺流程图从上到下由方框圈出三个步骤分别依次为1序、2序、3序的焊接过程,其中,3序焊接和1序焊接相同。
35.图2示出了根据本发明一个实施例的一种液压支架工件全自动焊接生产线中机器人自动焊接工作站的结构示意图;
36.如图2所示,所述液压支架工件全自动焊接生产线,包括:
37.自动搬运物流线;
38.预热炉1,用于对液压支架工件进行预热;
39.上下料工位2,用于放置预热后的液压支架工件;
40.至少一个机器人自动焊接工作站3,设置于所述自动搬运物流线上,用于对预热后的液压支架工件焊接;在具体实施中,可根据需要调整机器人自动焊接工作站的数量。
41.子母运输车4,用于各工位之间液压支架工件的输送。
42.当液压支架工件在预热炉1中预热后,转置于上下料工位2中,之后由子母运输车4将液压支架工件输送到机器人自动焊接工作站3进行焊接,工序之间的运输不需人工操作,克服了现有技术中采用人工操作存在安全隐患、工作效率低、生产成本高的问题。
43.图3示出了根据本发明一个实施例的一种液压支架工件全自动焊接生产线中定位示意图;
44.如图3所示,所述上下料工位2上设置有定位装置,该定位装置可对液压支架工件进行定位。实现工件上料时能够对液压支架工件进行定位,供子母运输车精确的取件,当工件下料时可以用来摆放液压支架工件。
45.图4示出了根据本发明一个实施例的一种液压支架工件全自动焊接生产线中三轴天轨的结构示意图;图5示出了根据本发明一个实施例的一种液压支架工件全自动焊接生产线中变位机装置的结构示意图;图6示出了根据本发明一个实施例的一种液压支架工件全自动焊接生产线的结构示意图。
46.如图6所示,所述机器人自动焊接工作站包括变位机装置5和三轴天轨6,所述三轴天轨6上安装有焊接机器人7,所述焊接机器人7可沿三轴天轨6移动。其中,三轴天轨6如图4所示。
47.如图5所示,所述变位机装置5包括对称设置的两个变位机升降轴501,所述变位机升降轴501底部设有变位机行走轴502,所述的两个变位机升降轴501之间设有翻转架503,该翻转架503的端部通过变位机翻转轴504与变位机升降轴501连接。其中,在本实施例中,变位机升降轴501被设置在一个壳体的内部,并且通过壳体与变位机行走轴502形成连接,由此变位机行走轴502通过壳体带动变位机升降轴501和翻转架503进行往返移动。
48.如图6所示,所述自动搬运物流线包括主轨8和子轨9,所述子母运输车4包括可在主轨8上移动的母车和可在子轨9上移动的子车。优选的,所述的主轨8和子轨9垂直设置,但不限于此。
49.所述液压支架工件全自动焊接生产线还包括滑触线10,所述子母运输车4通过伺服电机驱动,且所述滑触线10为伺服电机供电。
50.所述母车和子车上均安装有安全距离检测装置。
51.所述滑触线10的铺设方向与主轨或子轨平行。
52.可选的,所述子母运输车4上设有举升装置,该举升装置可驱动液压支架工件上下移动。
53.图7示出了根据本发明一个实施例的一种液压支架工件全自动焊接生产线中机器
人自动焊接工作站的工件上料示意图;
54.1、子母运输车4搬运液压支架工件在主轨8方向行走,伺服控制rgv根据指令精确到位。如图7中箭头1。
55.2、子车携带液压支架工件进入机器人自动焊接工作站,同时子车举升,根据程序控制到达指定位置。如图7中箭头2、箭头3。
56.3、两侧的翻转架503通过伺服控制,开始相向移动,根据程序制动到标定位置。如图7中箭头4。
57.4、子母运输车4举升机构带着液压支架工件下降,液压支架工件落在变位机工装上,工装的液压夹具自动装夹支架。如图7中箭头5。
58.5、子母运输车4举升机构继续下降,同时子车开始退出机器人自动焊接工作站3,直至回到母车。
59.6、变位机夹紧液压支架工件开始做翻转动作,同时机器人移动到焊缝位置焊接,开始焊接。
60.7、子母运输车4沿着主轨8去往其他工位进行物流转运。如图7中箭头6。
61.子母运输车4从料台取件的流程同液压支架工件下料流程。
62.图8示出了根据本发明一个实施例的一种液压支架工件全自动焊接生产线中机器人自动焊接工作站的工件下料示意图;
63.1、液压支架工件焊接完成后,变位机将支架翻转至水平位置,等待子母运输车4。如图8中箭头1。
64.2、子母运输车4沿主轨8方向行走,伺服控制rgv根据指令精确到位。如图8中箭头2。
65.3、子车进入机器人自动焊接工作站3,同时子车举升,根据程序控制到达指定位置。如图8中箭头3。
66.4、变位机自动液压工装自动松开液压支架工件工件。
67.5、子母运输车4举升机构开始举升,直至带动液压支架工件完全脱离变位机工装。如图8中箭头4。
68.6、两侧的翻转架503通过伺服控制,开始向背移动,根据程序制动到标定位置。如图8中箭头5。
69.7、子车携带液压支架工件退出机器人自动焊接工作站3,同时子车举升部分落下,直至回到子母运输车4。
70.8、子母运输车4将液压支架工件周转至上下料工位进行下料。如下图箭头6。
71.子母运输车4将工件放到料台下料的流程同液压支架工件上料流程。
72.图9示出了根据本发明一个实施例的一种液压支架工件全自动焊接生产线中两个rgv子母运输小车在机器人自动焊接工作站与上下料工位之间的第一行进路线图;
73.1、液压支架工件预热完成后,从焊接线外到达上下料工位2,等待子母运输车4。
74.2、子母运输车4沿主轨8方向行走,伺服控制rgv根据指令精确到位。
75.3、子车进入上下料工位2,根据程序控制到达指定位置。
76.4、子母运输车4举升机构开始举升,带动液压支架工件完全脱离上料平台。
77.5、子车携带液压支架工件退出上下料工位,同时子车举升部分落下,直至回到子
母运输车4。
78.6、子母运输车4将液压支架工件周转至自动焊接工位进行焊接。
79.其中,两个rgv子母运输车相互配合在多个工位之间进行液压支架工件的高效转移。另外,子母运输车从上下料平台取料的流程同液压支架工件上料流程。
80.图10示出了根据本发明一个实施例的一种液压支架工件全自动焊接生产线中两个rgv子母运输小车在机器人自动焊接工作站与上下料工位之间的第二行进路线图;
81.1、子母运输车4搬运液压支架工件在主轨8方向行走,伺服控制rgv根据指令精确到位。
82.2、子车携带液压支架工件进入上下料工位2,同时子车举升,根据程序控制到达指定位置。
83.3、子母运输车4举升机构带着液压支架工件下降,液压支架工件落在上下料平台上。
84.4、子母运输车4举升机构继续下降,同时子车开始退出机器人自动焊接工作站3,直至回到母车。
85.5、子母运输车4沿着主轨8去往其他工位进行物流转运。
86.其中,两个rgv子母运输车相互配合在多个工位之间进行液压支架工件的高效转移。另外,子母运输车4从下料台放件的流程同液压支架工件取料流程。
87.应该注意的是上述实施例对本发明进行说明而不是对本发明进行限制,并且本领域技术人员在不脱离所附权利要求的范围的情况下可设计出替换实施例。在权利要求中,不应将位于括号之间的任何参考符号构造成对权利要求的限制。单词“包含”不排除存在未列在权利要求中的元件或步骤。位于元件之前的单词“一”或“一个”不排除存在多个这样的元件。本发明可以借助于包括有若干不同元件的硬件以及借助于适当编程的计算机来实现。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。单词第一、第二、以及第三等的使用不表示任何顺序。可将这些单词解释为名称。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1