电动尾门与驻车制动系统集成控制器的制作方法
[0001]
本实用新型涉及汽车控制器领域。
背景技术:
[0002]
传统的电动尾门系统控制器和驻车制动系统控制器是两个独立的控制器。电动尾门系统控制器根据车辆状态、遥控钥匙、中控开关、尾门开关或脚踢传感器等信号控制电动撑杆电机正转或反转,实现尾门的开启或关闭,控制器示意图如图7和图8所示。驻车制动系统控制器根据电子手刹开关及车辆状态等信号控制驻车电机正转或反转,实现驻车制动卡钳的夹紧或释放,控制器示意图如图9所示。
[0003]
目前车辆上这两个部件相互独立,需要两个控制器分别进行控制,增加了器件成本。
技术实现要素:
[0004]
本实用新型的实用新型目的是将电动尾门系统控制器和驻车制动系统控制器集成在一起。
[0005]
为了实现上述目的,本实用新型采用的技术方案为:一种电动尾门与驻车制动系统集成控制器,其特征在于,将信号处理电路、微处理器单元、电机驱动和切换装置集成在同一个壳体内构成集成控制器,所述信号处理电路接收电动尾门控制信号和驻车制动控制信号,所述信号处理电路连接微处理器单元并将获取的控制信号输送至微处理器单元,所述微处理器单元连接电机驱动并将控制信号输送至电机驱动;
[0006]
所述电机驱动连接切换装置将驱动信号输送至切换装置,所述切换装置连接电动尾门的撑杆电机和驻车制动系统的驻车电机;
[0007]
或者,所述电机驱动直接连接撑杆电机或驻车电机。
[0008]
所述信号处理电路包括开关电路模块和通讯模块,所述开关电路模块通过信号线连接开关单元获取开关信号,通讯模块通过信号线连接其他控制器获取车辆状态及控制信号,所述开关单元包括中控开关、尾门开关、电子手刹开关和脚踢传感器中的部分或全部,所述其他控制器包括电子稳定性控制器、车身控制器、遥控钥匙信号接收器、脚踢传感器中的部分或全部。
[0009]
所述微处理器单元为多核微处理器单元,所述微处理器单元分为两个处理部分别连接两个独立的电机驱动,并向两个独立的电机驱动发出控制信号。
[0010]
所述微处理器单元由两个独立微处理器单元构成,两个独立的微处理器单元为单核或多核微处理器单元,两个独立的微处理器单元为主辅关系,主微处理器单元连接两个独立的电机驱动,并向两个独立的电机驱动发出控制信号。
[0011]
所述微处理器单元由两个独立微处理器单元构成,两个独立的微处理器单元为单核或多核微处理器单元,两个独立的微处理器单元为双主关系,两个独立的微处理器单元分别连接一个独立的电机驱动,并向对应的电机驱动发出控制信号。
[0012]
所述微处理器单元由两个独立微处理器单元构成,两个独立的微处理器单元为单核或多核微处理器单元,两个独立的微处理器单元为双主关系,一个独立的微处理器单元连接两个独立的电机驱动,并向两个独立的电机驱动发出控制信号;另一个独立的微处理器单元连接一个独立的电机驱动,并向该电机驱动发出控制信号。
[0013]
所述微处理器单元为多核微处理器单元,所述微处理器单元连接四个独立的电机驱动,并向四个独立的电机驱动发出控制信号。
[0014]
所述微处理器单元为多核微处理器单元,所述微处理器单元连接三个独立的电机驱动,并向三个独立的电机驱动发出控制信号。
[0015]
所述微处理器单元由两个独立微处理器单元构成,两个独立的微处理器单元为单核或多核微处理器单元,两个独立的微处理器单元为主辅关系,主微处理器单元连接四个独立的电机驱动,并向四个独立的电机驱动发出控制信号。
[0016]
所述微处理器单元由两个独立微处理器单元构成,两个独立的微处理器单元为单核或多核微处理器单元,两个独立的微处理器单元为主辅关系,主微处理器单元连接三个独立的电机驱动,并向三个独立的电机驱动发出控制信号。
[0017]
所述微处理器单元由两个独立微处理器单元构成,两个独立的微处理器单元为单核或多核微处理器单元,两个独立的微处理器单元为双主关系,两个独立的微处理器单元分别连接两个独立的电机驱动,并向对应的电机驱动发出控制信号。
[0018]
所述微处理器单元由两个独立微处理器单元构成,两个独立的微处理器单元为单核或多核微处理器单元,两个独立的微处理器单元为双主关系,一个独立的微处理器单元连接三个独立的电机驱动,并向三个独立的电机驱动发出控制信号;另一个独立的微处理器单元连接一个独立的电机驱动,并向该电机驱动发出控制信号。
[0019]
所述电机驱动为mosfet驱动芯片与分立mosfet或mosfet模块组成的全桥驱动电路。
[0020]
所述电机驱动为集成驱动芯片组成的全桥驱动电路。
[0021]
所述切换装置设有两个,两个所述切换装置的输入端分别连接一个独立的电机驱动,其中一个切换装置的输出端连接左撑杆电机和驻车电机,另一个切换装置的输出端连接右撑杆电机和驻车电机。
[0022]
所述切换装置设有一个,所述切换装置的输入端连接两个电机驱动,所述切换装置分别的输出端连接左撑杆电机、右撑杆电机和两个驻车电机。
[0023]
所述切换装置设有一个,所述切换装置的输入端连接一个独立的电机驱动,所述切换装置的输出端连接撑杆电机和驻车电机,另一个电机驱动直接连接驻车电机。
[0024]
所述切换装置设有一个,所述切换装置的输入端连接一个独立的电机驱动,所述切换装置的输出端连接撑杆电机和驻车电机;另外还有两个独立的电机驱动,一个电机驱动直接连接撑杆电机,一个电机驱动直接连接驻车电机。
[0025]
所述切换装置可以没有,独立的电机驱动分别直接连接撑杆电机和驻车电机。
[0026]
所述切换装置是由继电器组成的切换电路,或者所述切换装置是由mosfet驱动芯片与分立mosfet或mosfet模块组成的切换电路。
[0027]
本实用新型将电动尾门系统控制器和驻车制动系统控制器集成在一起,减少了壳体、连接器、pcb、电源芯片和微处理器单元的数量,减少了装配工序,降低了成本。
附图说明
[0028]
下面对本实用新型说明书中每幅附图表达的内容作简要说明:
[0029]
图1-15为电动尾门与驻车制动系统集成控制器不同实施例结构示意图;
[0030]
图16为双撑杆电机电动尾门系统控制器结构示意图;
[0031]
图17为单撑杆电机电动尾门系统控制器结构示意图;
[0032]
图18为驻车制动系统控制器结构示意图。
具体实施方式
[0033]
下面对照附图,通过对实施例的描述,本实用新型的具体实施方式如所涉及的各构件的形状、构造、各部分之间的相互位置及连接关系、各部分的作用及工作原理、制造工艺及操作使用方法等,作进一步详细的说明,以帮助本领域技术人员对本实用新型的实用新型构思、技术方案有更完整、准确和深入的理解。
[0034]
电动尾门系统控制器采用微处理器单元和电机驱动电路来控制左撑杆电机和右撑杆电机,驻车制动系统控制器采用微处理器单元和电机驱动电路来控制左驻车电机和右驻车电机。左右撑杆电机和左右驻车电机驱动方式相同,且撑杆电机与驻车电机可以分时工作,因此撑杆电机与驻车电机可以共用电机驱动部分,采用切换装置来完成撑杆电机与驻车电机的分时驱动。因此可设计一个新的集成控制器,通过共用电机驱动,可完成电动尾门系统和驻车制动系统的控制。
[0035]
电动尾门与驻车制动系统集成控制器,将电动尾门系统控制器与驻车制动系统控制器集成为一个控制器,实现单撑杆电机电动尾门和双撑杆电机电动尾门功能,实现驻车制动系统功能。其包含了信号处理电路、微处理器单元、电机驱动和切换装置电路,将电动尾门与驻车制动系统两个独立控制器的2个壳体和2个pcb集成为1个壳体和1个pcb。
[0036]
信号处理电路包含开关电路模块和通讯模块,开关电路模块处理中控开关、尾门开关、电子手刹开关和脚踢传感器发来的开关信号,通讯模块接收其它控制器发来的车辆状态信号、遥控钥匙信号和脚踢传感器发来的状态信号等。
[0037]
微处理器单元可以是一个多核微处理器单元,也可以是两个微处理器单元,微处理器单元1和微处理器单元2;微处理器单元1和微处理器单元2可以是单核或多核微处理器单元;微处理器单元1和微处理器单元2可以为主辅关系,也可以为双主关系。
[0038]
电机驱动电路可以是mosfet驱动芯片与分立mosfet或mosfet模块组成的全桥驱动电路,也可以是集成驱动芯片组成的全桥驱动电路。
[0039]
切换装置电路可以是继电器组成的切换电路,也可以是mosfet驱动芯片与分立mosfet或mosfet模块组成的切换电路;切换装置可以是一个,也可以是两个,切换装置1和切换装置2,也可以没有切换装置。
[0040]
上述电路系统实现电动尾门系统功能和驻车制动系统功能的切换。在电动尾门系统控制尾门开启或关闭的过程中,若驻车制动系统需要工作,则响应驻车制动系统功能,暂停电动尾门开启或关闭,在驻车制动系统功能完成后返回电动尾门系统。在驻车制动系统控制驻车制动卡钳夹紧或释放的过程中,若电动尾门系统需要工作,则暂不响应电动尾门系统控制尾门开启或关闭,在驻车制动系统功能完成后响应电动尾门系统。上述电路系统也可以同时实现电动尾门系统功能和驻车制动系统功能,即不用切换装置,使电动尾门系
统功能和驻车制动系统功能同时工作。
[0041]
下面针对不同实施例详细说明:
[0042]
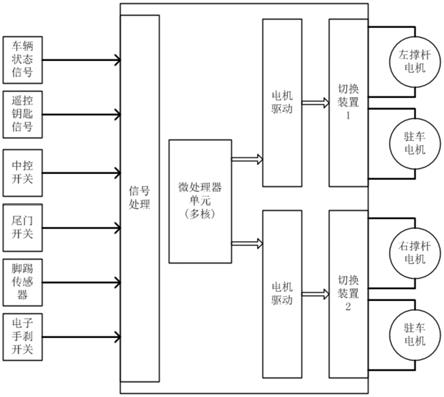
实施例1如图1所示,信号处理电路获取车辆状态信号、遥控钥匙信号、中控开关信号、尾门开关信号、脚踢传感器信号和电子手刹信号,并将获取的信号输送至多核微处理器单元,多核的微处理器单元输出控制信号至两个独立的电机驱动,其中一个电机驱动连接切换装置1,切换装置1连接左撑杆电机和驻车电机,另一个电机驱动连接切换装置2,切换装置2连接右撑杆电机和驻车电机。
[0043]
实施例2如图2所示,信号处理电路获取车辆状态信号、遥控钥匙信号、中控开关信号、尾门开关信号、脚踢传感器信号和电子手刹信号,并将获取的信号输送至多核微处理器单元,多核的微处理器单元输出控制信号至两个独立的电机驱动,两个电机驱动连接同一个切换装置,切换装置连接左撑杆电机、右撑杆电机和驻车电机。
[0044]
实施例3如图3所示,信号处理电路获取车辆状态信号、遥控钥匙信号、中控开关信号、尾门开关信号、脚踢传感器信号和电子手刹信号,并将获取的信号输送至多核微处理器单元,多核的微处理器单元输出控制信号至两个独立的电机驱动,其中一个电机驱动连接切换装置,切换装置连接撑杆电机和驻车电机,另一个电机驱动直接连接驻车电机。
[0045]
实施例4如图4所示,信号处理电路获取车辆状态信号、遥控钥匙信号、中控开关信号、尾门开关信号、脚踢传感器信号和电子手刹信号,并将获取的信号输送至两个独立的微处理器单元,即主微处理器单元和辅微处理器单元,主微处理器单元输出控制信号至两个独立的电机驱动,其中一个电机驱动连接切换装置1,切换装置1连接左撑杆电机和驻车电机,另一个电机驱动连接切换装置2,切换装置2连接右撑杆电机和驻车电机。
[0046]
实施例5如图5所示,信号处理电路获取车辆状态信号、遥控钥匙信号、中控开关信号、尾门开关信号、脚踢传感器信号和电子手刹信号,并将获取的信号输送至两个独立的微处理器单元,即主微处理器单元和辅微处理器单元,主微处理器单元输出控制信号至两个独立的电机驱动,两个电机驱动连接同一个切换装置,切换装置连接左撑杆电机、右撑杆电机和驻车电机。
[0047]
实施例6如图6所示,信号处理电路获取车辆状态信号、遥控钥匙信号、中控开关信号、尾门开关信号、脚踢传感器信号和电子手刹信号,并将获取的信号输送至两个独立的微处理器单元,即微处理器单元1和微处理器单元2,两个微处理器单元分别输出控制信号至两个独立的电机驱动,其中一个电机驱动连接切换装置,切换装置连接撑杆电机和驻车电机,另一个电机驱动直接连接驻车电机。
[0048]
实施例7如图7所示,信号处理电路获取车辆状态信号、遥控钥匙信号、中控开关信号、尾门开关信号、脚踢传感器信号和电子手刹信号,并将获取的信号输送至两个独立的微处理器单元,即微处理器单元1和微处理器单元2,两个微处理器单元分别输出控制信号至两个独立的电机驱动,其中一个电机驱动连接切换装置1,切换装置1连接左撑杆电机和驻车电机,另一个电机驱动连接切换装置2,切换装置2连接右撑杆电机和驻车电机。
[0049]
实施例8如图8所示,信号处理电路获取车辆状态信号、遥控钥匙信号、中控开关信号、尾门开关信号、脚踢传感器信号和电子手刹信号,并将获取的信号输送至两个独立的微处理器单元,即微处理器单元1和微处理器单元2,一个独立的微处理器单元连接两个独立的电机驱动,并向两个独立的电机驱动发出控制信号,其中一个电机驱动连接切换装置,切
换装置连接撑杆电机和驻车电机,另一个电机驱动直接连接撑杆电机;另一个独立的微处理器单元连接一个独立的电机驱动,并向该电机驱动发出控制信号,电机驱动直接连接驻车电机。
[0050]
实施例9如图9所示,信号处理电路获取车辆状态信号、遥控钥匙信号、中控开关信号、尾门开关信号、脚踢传感器信号和电子手刹信号,并将获取的信号输送至多核微处理器单元,多核的微处理器单元输出控制信号至四个独立的电机驱动,四个电机驱动分别连接左撑杆电机、右撑杆电机和两个驻车电机。
[0051]
实施例10如图10所示,信号处理电路获取车辆状态信号、遥控钥匙信号、中控开关信号、尾门开关信号、脚踢传感器信号和电子手刹信号,并将获取的信号输送至多核微处理器单元,多核的微处理器单元输出控制信号至三个独立的电机驱动,三个电机驱动分别连接撑杆电机和两个驻车电机。
[0052]
实施例11如图11所示,信号处理电路获取车辆状态信号、遥控钥匙信号、中控开关信号、尾门开关信号、脚踢传感器信号和电子手刹信号,并将获取的信号输送至两个独立的微处理器单元,即主微处理器单元和辅微处理器单元,主微处理器单元输出控制信号至四个独立的电机驱动,四个电机驱动分别连接左撑杆电机、右撑杆电机和两个驻车电机。
[0053]
实施例12如图12所示,信号处理电路获取车辆状态信号、遥控钥匙信号、中控开关信号、尾门开关信号、脚踢传感器信号和电子手刹信号,并将获取的信号输送至两个独立的微处理器单元,即主微处理器单元和辅微处理器单元,主微处理器单元输出控制信号至三个独立的电机驱动,三个电机驱动分别连接撑杆电机和两个驻车电机。
[0054]
实施例13如图13所示,信号处理电路获取车辆状态信号、遥控钥匙信号、中控开关信号、尾门开关信号、脚踢传感器信号和电子手刹信号,并将获取的信号输送至两个独立的微处理器单元,即微处理器单元1和微处理器单元2,微处理器单元1输出控制信号至两个独立的电机驱动,两个电机驱动分别连接左撑杆电机和驻车电机,微处理器单元2输出控制信号至两个独立的电机驱动,两个电机驱动分别连接右撑杆电机和驻车电机。
[0055]
实施例14如图14所示,信号处理电路获取车辆状态信号、遥控钥匙信号、中控开关信号、尾门开关信号、脚踢传感器信号和电子手刹信号,并将获取的信号输送至两个独立的微处理器单元,即微处理器单元1和微处理器单元2,微处理器单元1输出控制信号至三个独立的电机驱动,三个电机驱动分别连接左撑杆电机、右撑杆电机和驻车电机,微处理器单元2输出控制信号至一个独立的电机驱动,该电机驱动连接驻车电机。
[0056]
实施例15如图15所示,信号处理电路获取车辆状态信号、遥控钥匙信号、中控开关信号、尾门开关信号、脚踢传感器信号和电子手刹信号,并将获取的信号输送至两个独立的微处理器单元,即微处理器单元1和微处理器单元2,微处理器单元1输出控制信号至两个独立的电机驱动,两个电机驱动分别连接撑杆电机和驻车电机,微处理器单元2输出控制信号至一个独立的电机驱动,该电机驱动连接驻车电机。
[0057]
上面结合附图对本实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本实用新型的构思和技术方案直接应用于其它场合的,均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1