一种物料自动加料系统以及物料自动加料控制方法与流程
[0001]
本发明适用于激光熔覆技术领域,也适用于等离子熔覆技术领域,尤其涉及一种物料自动加料系统和一种物料自动加料控制方法。
背景技术:
[0002]
激光熔覆是一种新型的加工制造技术,利用高能激光束辐照,通过迅速熔化、扩展和凝固,在基材表面熔覆一层具有特殊物理、化学或力学性能的材料,构成一种不同于基材的新材料,以弥补基体所缺少的高性能。激光熔覆时,用负压式送粉器通过高压惰性气体来输送合金粉末,形成一定刚度的载粉流直接进入熔覆的熔池。载粉气流为惰性气体,可有效防止激光熔覆过程的氧化;具有刚性的粉末流可以用在同步式侧向或同轴送粉喷嘴,实现三维激光熔覆。
[0003]
但目前现有的送粉器加料过程中,都是采用一对一的加料方式,即一个储料机构对应一个送粉机构进行加料,且不具备自动化加料、加料效率低,满足不了大批量生产的自动控制需求。
技术实现要素:
[0004]
本发明的目的是提供一种物料自动加料系统和一种物料自动加料控制方法,具备一对多自动化加料,加料效率高,能够满足大批量生产的自动控制需求。
[0005]
为实现上述目的本发明所采取的技术方案为:一种物料自动加料系统,包括:储料机构,设有出料端;输送机构,包括多个依次首尾连接的输送单元,在输送机构上设有接料端以及沿其长度方向顺序设置的多个输料端,其中,所述接料端连接所述出料端;多个送粉机构,每个送粉机构均设有一个入料端,每个所述入料端对应连接一个所述输料端。
[0006]
使得输送机构能够将储料机构中物料通过输料端分别输送至多个送粉机构中,实现一对多的自动化加料过程,能够满足大批量生产的自动控制需求。
[0007]
进一步的,所述输送机构包括:驱动部;第一输送单元,沿其输送方向依次设有所述接料端和一个所述输料端,并与所述驱动部传动连接;至少一个第二输送单元,沿所述输送方向依次传动连接,并分别设有一接料端和一输料端;其中,所述驱动部可驱动所述第一输送单元和所述至少一个第二输送单元输送物料。
[0008]
使得所要传送的粉料按照所述输送方向依次经过所述第一输送单元和所述至少一个第二输送单元。
[0009]
进一步的,所述至少一个第二输送单元中末端的第二输送单元设有两个沿所述输送方向依次设置的所述输料端,其中在输送方向上靠前的输料端连接至一个所述送粉机构的所述入料端,在输送方向上靠后的输料端连接收料容器。
[0010]
收料容器用于接收输送机构在输送过程中产生的余料,便于重复利用。
[0011]
进一步的,所述第一输送单元和每一个所述第二输送单元结构相同,均包括:壳体,为中空的筒状结构;传动组件,可转动的设于所述壳体内部;其中,相邻的两个输送单元
的所述壳体密封连接,且其传动组件分别传动连接;所述第一输送单元的所述传动组件与所述驱动部传动连接。
[0012]
使得驱动部能够传动连接第一输送单元和每一个第二输送单元。
[0013]
进一步的,所述储料机构包括:储料壳体,内设有储料空间,靠近所述输送机构的一侧设有连通所述储料空间的所述出料端;多个第一物料监测位,分别设于所述储料壳体的不同高度;第一气压平衡端,设于所述储料壳体的位置高于所述多个第一物料监测位分别位于所述储料壳体的高度:每一个所述送粉机构分别包括:料筒,设有物料容纳空间,靠近所述输送机构的一侧设有与所述物料容纳空间连通的所述入料端;多个第二物料监测位,分别设于所述料筒的不同高度;第二气压平衡端,设于所述料筒的位置高于所述多个第二物料监测位分别位于所述料筒的高度;送料器,连接所述料筒。
[0014]
多个第一物料监测位用于监测储料壳体的物料含量,根据不同的含量,物料自动加料系统进行相应的操作,使储料壳体内的物料始终达到平衡;第一气压平衡端用于自动控制储料壳体内的气压,实现储料壳体自动加料过程。
[0015]
进一步的,所述输送机构还设有多个第三气压平衡端,且分别与所述多个第二气压平衡端以及所述第一气压平衡端一一对应设置,所述物料自动加料系统还包括:多个气压连通管,分别连通所述第一气压平衡端与相应的一个所述第三气压平衡端、以及每一个所述第二气压平衡端与相应的一个所述第三气压平衡端之间;其中,每一个所述气压连通管还分别设有第一控制阀。第一控制阀控制储料机构与输送机构、送粉机构内的气压保持平衡,形成气流循环输送、促进物料在本物料自动加料系统中的自动加料。
[0016]
进一步的,多个传感器,分别设于所述多个第一物料监测位和所述多个第二物料监测位;多个第二控制阀,分别连接在所述出料端和所述接料端之间、所述输料端与收料容器之间以及每一个所述输料端与相应的所述入料端之间。
[0017]
用于获取物料位于其中一个第一物料监测位和第二物料监测位时的位置信息,将信息传输至控制器,控制器控制相应的控制阀、驱动部做相应的反应。
[0018]
进一步的,所述储料机构还包括:负压装置,设于所述储料壳体内,用于对所述储料空间生成负压;其中,所述储料壳体还设有进料端;所述物料自动加料系统还包括:敞开式储粉容器,设于所述储粉机构的一侧,通过设有第二控制阀的供料管道连通至所述进料端。
[0019]
通过设置负压装置,将储料壳体内的气压抽出至外部,使储料壳体内的气压小于外部气压,使外部的敞开式储粉容器内的物料自动从进料端进入储料壳体内,实现自动进料。
[0020]
进一步的,还包括:控制端,电连接所述多个传感器、所述多个第二控制阀、所述多个第一控制阀、所述输送机构以及所述负压装置。
[0021]
用于根据传感器反馈的物料高度信息,对应控制相应的第二控制阀、第一控制阀、输送机构以及负压装置做对应的动作,实现物料自动加料系统的自动加料过程。
[0022]
一种物料自动加料控制方法,其应用于上述任一项的物料自动加料系统,包括:
[0023]
s1、分别获取储料机构所储放物料的物料储放面在储料机构内的第一高度信息值h1、以及至少两个送粉机构中任一个送粉机构所储放物料的物料储放面在相应的送粉机构内的第二高度信息值h2;
[0024]
s2、分别同时判断第一高度信息值h1与多个第二高度信息值h2;
[0025]
s3、根据第一高度信息值h1与多个第二高度信息值h2的判断,所述储料机构与每一个所述送粉机构完成加料与送料。
[0026]
采用本发明的技术方案后,能够达到如下技术效果:实现了一对多自动化加料输送,大大提高了加料效率,能够满足大批量生产的自动控制需求。
附图说明
[0027]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0028]
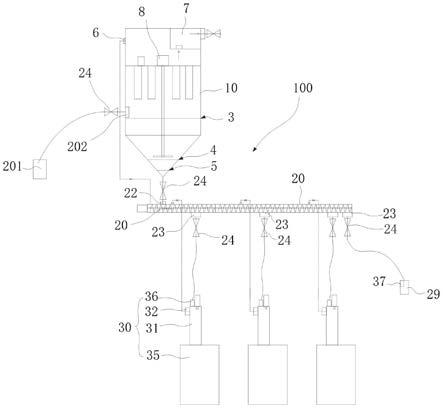
图1为本发明提供的一种物料自动加料系统100的结构示意图。
[0029]
图2为图1物料自动加料系统100的具体结构示意图。
[0030]
图3为图1中输送机构20的结构示意图。
[0031]
图4为输送单元的结构示意图。
[0032]
图5为图4内部结构示意图。
[0033]
图6为图4中传动组件214的结构示意图。
[0034]
图7为图3中a的局部放大图。
[0035]
图8为一种物料自动加料控制方法的流程示意图。
[0036]
图9为图4中输料端23的另一种安装示意图。
[0037]
图10为图9中a-a的剖视图。
[0038]
主要元件符号说明:
[0039]
1为储料壳体;201为敞开式储粉容器;202为进料端;3为第二上限位;4为第二下限位;5为警戒值;6为第一气压平衡端;601为气压连通管;7为负压装置;701为风机;702为出风口;703为第三控制阀;704为进风口;8为振动搅拌机构;801为搅拌电机;802为过滤器;803为振动电机;804为搅拌轴;10为储料机构;20为输送机构;21为驱动部;211为减速电机;212为螺杆;213为壳体;214为传动组件;215为输送通道;216为轴承;217为轴承座;218为联轴件;;220为轴承盖;22为接料端;23为输料端;24为第二控制阀;26为第一控制阀;261为第三气压平衡端;29为收料容器;30为送粉机构;31为料筒;32为第二气压平衡端;33为第一上限位;34为第一下限位;35为送料器;36为入料端;37为传感器;100为物料自动加料系统。
具体实施方式
[0040]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0041]
实施例1:
[0042]
参见图1,一种物料自动加料系统100的结构示意图,包括储料机构10、输送机构20以及至少两个送粉机构30。
[0043]
具体的,储料机构10,设有出料端设于储料机构10的下端;输送机构20,设有与出料端配合连接的接料端22、以及沿输送方向顺序设置的多个输料端23;每一个送粉机构30分别设有入料端36且分别对应连接输料端23。使得输送机构20能够将储料机构10中物料通过输料端23分别输送至多个送粉机构30中,实现一对多的自动化加料过程,能够满足大批量生产的自动控制需求。
[0044]
举例来说,所述输料端23可以是如图1所示,即输料端23的出口方向竖直向下;当然输料端23也可以设置在输送机构20的侧边,如图9与图10所示,即输料端23出口方向与输送机构20的竖直方向呈一定倾斜角度,使得输送机构20在实际输送过程中,物料能够往后输送,避免了输料端23的出口方向设在输送机构20正下方所带来的物料输送不均衡,促使每个输料端23都同步出粉,防止实际加料过程中,从前往后依次加满。
[0045]
优选的,参见图3,输送机构20包括:驱动部21、第一输送单元(如图中包括一个第一输送单元)以及至少一个第二输送单元(如图中包括两个第二输送单元)。
[0046]
具体的,驱动部21传动连接第一输送单元、以及沿输送方向依次传动连接第一输送单元的第二输送单元;第一输送单元和每一个第二输送单元沿其输送方向分别依次设有接料端22和一个输料端23。设置传动连接驱动部21,通过驱动部带动第一输送单元以及与其连接的至少一个第二输送单元传动,使得输送机构20能够将物料传输从第一输送单元依次传递至各个第二输送单元,提高物料输送线效率,并通过各个输料端23将物料依次传递至与输料端23连接的每一个送粉机构30中,实现一对多的物料传递过程。举例来说,驱动部21与第一输送单元之间还设有减速电机211,用于减速;驱动部21可以是电机,用于传动。
[0047]
优选的,参见图4,第一输送单元和每一个第二输送单元结构相同,均包括:中空的筒状结构的壳体213;传动组件214,可转动的设于壳体213内部;其中,相邻的两个输送单元的壳体213密封连接,二者的传动组件214传动连接;第一输送单元的传动组件还传动连接驱动部21。
[0048]
具体的,参见图3与图5,传动组件214,包括连接在壳体213两端的轴承座217、以及与驱动部21传动连接的螺杆212;螺杆212表面设有螺旋叶片沿螺杆212输送方向分布;便于将物料沿输送机构20起始端运送至末端,且螺旋输送过程中能够对物料起到松散的作用,使物料输送均匀;参见图6与图7,轴承座217分别内嵌轴承216,轴承座217与轴承216安装位之间还设有输送通道215,用于输送物料,轴承216套接螺杆212,相邻螺杆212之间的端部设有凹槽(图中未示出),且通过与凹槽配合的联轴件218传动连接相邻螺杆212,使得驱动部能够传动连接第一输送单元和每一个第二输送单元;轴承座217还设有轴承盖220盖设于轴承外侧,增加了输送单元之间连接的密封性。举例来说:相邻两个输送单元之间通过一个设置凹槽,一个设置凸柱以实现插接的方式来实现传动连接;当然还可以是其他结构通过设置多个可拆卸输送单元,实现一个输送电机带动较长的输送机构运作,此处不再一一赘述。
[0049]
实施例2:
[0050]
本实施例为在实施例1的基础上的进一步优化方案:
[0051]
参见图2-3,至少一个第二输送单元中的最后一个第二输送单元的尾部设置有两个输料端23,两个输料端23沿输送方向依次设置,其中顺序在先的输料端23(图3中靠近左侧的)连接至一个送粉机构30的入料端36,而顺序在后的输料端23(图3中靠近右侧的)连接收料容器29。收料容器29用于接收输送机构20在输送过程中产生的余料,便于重复利用。
[0052]
优选的,储料机构10包括:储料壳体1、多个第一物料监测位(图中未示出)以及第一气压平衡端6;每一个送粉机构30分别包括:料筒31、多个第二物料监测位(图中未示出)、第二气压平衡端32以及送料器35。
[0053]
具体的,储料壳体1内设有储料空间,且靠近输送机构20的一侧设有连通储料空间的出料端;储料壳体的不同高度分别设有多个第一物料监测位;从上往下依次为:第二上限位3、第二下限位4以及警戒值5,用于监测储料壳体1的物料含量,根据不同的含量,物料自动加料系统进行相应的操作,使储料壳体1内的物料始终达到平衡;第一气压平衡端6,设于储料壳体的位置高于第二上限位3位于储料壳体1的高度;第一气压平衡端6用于自动控制储料壳体1内的气压,实现储料壳体1自动加料过程。举例来说,第一气压平衡端6通过气压连通管601连通输送机构20,且第一气压平衡端6外还设有控制阀26安装于连通输送机构20与第一气压平衡端6的气压连通管601上,通过控制控制阀26开启与关闭,来达到控制储料壳体1内的气压。
[0054]
料筒31,内设物料容纳空间,靠近输送机构20的一侧设有与物料容纳空间连通的入料端36;料筒31表面设有不同高度的多个第二物料监测位;从上往下依次为:第一上限位33、第一下限位34,用于监测料筒31内的物料含量,根据不同的含量,物料自动加料系统进行相应的操作,使料筒31内的物料始终达到平衡;第二气压平衡端32,设于料筒31的位置高于第一上限位33位于料筒31的高度;用于平衡料筒31内的气压,使物料能够顺利收集于料筒31内;送料器35,连接料筒31。送料器35用于接收料筒31内的物料。
[0055]
优选的,输送机构20还设有分别与多个第二气压平衡端32以及第一气压平衡端6分别一一对应的多个第三气压平衡端261;物料自动加料系统100还包括:多个气压连通管601,分别连通第一气压平衡端6与相应的一个第三气压平衡端261、以及每一个第二气压平衡端32与相应的一个第三气压平衡端261之间;其中,每一个气压连通管601还分别设有第一控制阀26。第一控制阀26用于控制储料机构10与输送机构20、送粉机构30内的气压保持平衡,形成气流循环输送、促进物料在本物料自动加料系统100中的自动加料。
[0056]
优选的物料自动加料系统100,还包括多个传感器37,分别设于多个第一物料监测位和多个第二物料监测位;多个第二控制阀24,分别连接在出料端和接料端22之间、输料端23与收料容器29之间以及每一个输料端23与相应的入料端36之间。用于获取物料位于其中一个第一物料监测位和第二物料监测位时的位置信息,将信息传输至控制器,控制器控制相应的控制阀、驱动部做相应的反应。
[0057]
优选的,储料机构10还包括:负压装置(图中未示出),设于储料壳体1内,用于对储料空间生成负压;其中,储料壳体1还设有进料端202;物料自动加料系统100还包括敞开式储粉容器201,设于储粉机构10的一侧,通过设有第二控制阀24的供料管道连通至进料端202。通过设置负压装置,将储料壳体1内的气压抽出至外部,使储料壳体1内的气压小于外部气压,使外部的敞开式储粉容器201内的物料自动从进料端202进入储料壳体1内,实现自动进料。
[0058]
举例来说:负压装置7为风机701,设于储料壳体1内上方,风机701排风口连接设于储料壳体1外部的出风口702,出风口702上设有第三控制阀703,通过风机701与第三控制阀703开启,将储料壳体1内空气由进风口704进入并从出风口702排出,形成负压。
[0059]
进一步的,参见图1与图2,储料机构10还包括:设于储料壳体1内的振动搅拌机构
8,振动搅拌机构8包括:搅拌电机801、连接搅拌电机801的搅拌轴804,通过搅拌电机801带动搅拌轴804对储料壳体1物料进行搅拌,加料过程中,能够加速物料从储料壳体1落入输送机构20内;储料壳体1内还设有多个过滤器802处于负压装置7与进料端202之间,将负压装置7与进料端202分隔在储料壳体1内的不同容纳空间,使得负压装置7工作时,从进料端202进入的气体只能经过过滤器802再由负压装置7排出储料壳体1外;具体的,当负压装置7开启,进料端202进行进料时,过滤器802能够对储料壳体1扬起的物料进行过滤,防止一些物料在负压装置7的吸力作用下,吸出储料壳体1外;同时,振动搅拌机构8还包括:振动电机803,安装于过滤器802上端,能够对过滤器802产生震动,对过滤器802表面粘附的物料进行抖落,防止堵塞过滤器802,影响过滤效果。
[0060]
优选的,物料自动加料系统100还包括:控制端(图中未示出),电连接多个传感器37、多个第二控制阀24、多个第一控制阀26、输送机构20以及负压装置。用于根据传感器37反馈的物料高度信息,对应控制相应的第二控制阀24、第一控制阀26、输送机构20以及负压装置做对应的动作,实现物料自动加料系统100的自动加料过程。
[0061]
实施例3:
[0062]
本实施例为在实施例2的基础上的进一步优化方案:
[0063]
参见图8,一种物料自动加料控制方法,包括:
[0064]
步骤s1、分别获取储料机构所储放物料的物料储放面在储料机构内的第一高度信息值h1、以及至少两个送粉机构中任一个送粉机构所储放物料的物料储放面在相应的送粉机构内的第二高度信息值h2;
[0065]
步骤s2、分别同时判断第一高度信息值h1与多个第二高度信息值h2;
[0066]
步骤s3、根据第一高度信息值h1与多个第二高度信息值h2的判断,所述储料机构与每一个所述送粉机构完成加料与送料。
[0067]
一方面,在步骤s2中,判断多个第二高度信息值h2,具体为:
[0068]
1)在判断多个第二高度信息值h2中的任意一个第二高度信息值h2小于等于预设的第一下限高度值y1时,即h2≤y1,分别生成至少一个第一控制指令;第一控制指令用于控制相应的第二控制阀与第一控制阀处于打开状态;
[0069]
2)在判断多个第二高度信息值h2中的任意一个第二高度信息值h2大于等于预设的第一上限高度值y2时,即h2≥y2,分别生成至少一个第二控制指令;第二控制指令用于控制相应的第二控制阀与第一控制阀处于关闭状态;
[0070]
3)在判断所有第一控制阀与第二控制阀都处于关闭状态时,生成第三控制指令,控制输送机构处于停止工作状态;
[0071]
4)在判断至少有一个第一控制阀与相应的第二控制阀处于打开状态时,生成第七控制指令,控制输送机构处于工作状态;
[0072]
另一方面,在步骤s2中,判断第一高度信息值h1,具体为:
[0073]
1)在判断第一高度信息值h1位于预设的警戒高度值x和第二下限高度值z1之间,即x<h1<z1时,判断输送机构是否停止工作;
[0074]
1.1)输送机构未停止工作,则生成第五控制指令;第五控制指令用于控制负压装置处于停止工作状态以及控制储料机构的出料端处于开启状态;
[0075]
1.2)输送机构停止工作,则生成第四控制指令;第四控制指令用于控制负压装置
处于工作状态以及控制储料机构的出料端处于关闭状态;
[0076]
2)在判断第一高度信息值h1大于等于预设的第二上限高度值z2,即h1≥z2时,生成第五控制指令;第五控制指令用于控制负压装置处于停止工作状态以及控制储料机构的出料端处于开启状态;
[0077]
3)在判断第一高度信息值h1小于等于警戒高度值x,即h1≤x时,生成第四控制指令,控制负压装置处于工作状态以及控制储料机构的出料端处于关闭状态。
[0078]
在步骤s1中,获取第一高度信息值h1具体表现为:通过传感器感应获取储料机构内的物料储放面位于储料机构的上限位还是下限位还是警戒位,并对应生成相应的第二上限高度值z2、第二下限高度z1和警戒值x;获取的第二高度信息值h2为:通过传感器感应获取每一个送粉机构内的物料处于该送粉机构中粉筒内的上限位还是下限位,并对应生成第一上限高度值y2、第一下限高度值y1。
[0079]
在步骤2中判断任意一个第二高度信息值h2≤y1的具体实现方式为:当传感器获取到至少一个送粉机构内的储放物料高度低于等于该送粉机构中粉筒内设置的下限位,即第一下限高度值y1时,生成对应的感应信号发给控制器,控制器控制相应的第二控制阀与第一控制阀处于打开状态。
[0080]
在步骤2中判断任意一个第二高度信息值h2≥y2的具体实现方式为:传感器实时获取判断各个送粉机构内的储放物料高度,当其中一个送粉机构内的储放物料高度大于等于该送粉机构中粉筒内设置的上限位,即到达预设的第一上限高度值y2时,传感器生成对应的感应信号发给控制器,控制器控制该送料结构与输送机构连接的第二控制阀以及相应的第一控制阀处于关闭状态,使得停止将物料运输至该送粉机构中的粉筒内。
[0081]
在步骤2中判断所有第二控制阀与第一控制阀都处于关闭状态时,生成第三控制指令,控制输送机构处于停止工作状态的具体实现方式为:当传感器获取到相应的送粉机构中粉筒内的储放物料高度大于等于设置的上限位时,表明相应的送粉机构中粉筒内的物料处于满状态,此时,控制器控制相应的送料机构与输送机构连接的第二控制阀以及对应的第一控制阀处于关闭状态,当控制器获取到所有第二控制阀以及对应的第一控制阀都处于关闭状态时,控制输送机构处于停止工作状态。
[0082]
在步骤2中判断至少有一个第一控制阀与相应的第二控制阀处于打开状态时,生成第七控制指令,控制输送机构处于工作状态。
[0083]
在步骤2中判断第一高度信息值h1位于预设的警戒高度值x和第二下限高度值z1之间,即x<h1<z1的具体实现方式为:当传感器获取到储料机构的物料储放高度位于针对该储料机构预设的下限位与警戒值之间时,此时,控制器,会判断输送机构是否处于工作状态,即输送电机是否运转;控制器获取信息显示输送电机在运转,则控制器控制负压装置处于停止工作状态以及储料机构的出料端处于开启状态;控制器判断输送电机已停转,则控制器控制储料机构的出料端处于关闭状态;同时,控制储料机构内的负压装置处于工作状态,使储料机构内产生负压,将外部物料吸入储料机构内,完成储料机构的自动加料过程。
[0084]
在步骤2中判断第一高度信息值h1大于等于预设的第二上限高度值z2,即h1≥z2时的具体实现方式为:当传感器获取到储料机构的物料储放高度大于等于预设的上限位,即第二上限高度值z2时,控制器控制负压装置处于停止工作状态,以停止继续加料,随后控制器控制储料机构的出料端处于开启状态。
[0085]
在步骤2中判断第一高度信息值h1小于等于警戒高度值x,即h1≤x时,的具体实现方式为:当传感器获取到储料机构的物料储放高度位于针对该储料机构预设的警戒值x时,则控制器控制储料机构的出料端处于关闭状态;同时,控制储料机构内的负压装置处于工作状态,使储料机构内产生负压,将外部物料吸入储料机构内,完成储料机构的自动加料过程。
[0086]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1