一种伸缩臂的制作方法
1.本实用新型涉及工程机械中的伸缩臂,尤其涉及一种伸缩臂。
背景技术:
2.目前,在工程机械中有多种机械的工作臂都有用到伸缩臂,如汽车吊、凿岩机、混凝土湿喷机等。传统伸缩臂均由内臂与外臂两大部分组成,内臂套设在外臂内,内臂的一端可伸出或回缩进外臂,且内臂的伸缩一般采用油缸推动。现有的伸缩臂只能内臂套进行移动,内臂与外臂叠加在一起的长度过长,使伸缩臂整体的结构显得笨重。因此对于一种伸缩臂,内臂与外臂叠加在一起的长度过长,使伸缩臂整体的结构显得笨重是我们要解决的问题。
技术实现要素:
3.为克服上述缺点,本实用新型的目的在于提供一种结构简单的伸缩臂。
4.为了达到以上目的,本实用新型采用的技术方案是:一种伸缩臂,包括固定座和滑动设置在固定座上的外臂,固定座上设置有电机,电机的输出轴通过传动轴与传输带的一端连接,传输带的另一端与外臂连接,外臂上转动设置有上转动轴和下转动轴,上转动轴和下转动轴之间套设有闭环链条且闭环链条能发生转动,闭环链条的一侧位于外臂外部且设置在固定座上的固定板套设在其上,外臂内部滑动设置有内臂,闭环链条的另一侧位于外臂内部且内臂与其连接。
5.本实用新型一种伸缩臂的有益效果是,将固定座进行固定后,开启电机,电机输出轴转动,带动传输带顺时针移动,传输带带动外臂下移。且由于固定座是固定不动的,闭环链条设置在外臂上,外臂下移时,闭环链条位于外臂内部的一侧在固定板处发生转动而且二者之间产生摩擦,产生的摩擦力使外臂上的闭环链条发生顺时针转动。内臂与闭环链条位于外臂内部的另一侧连接,闭环链条转动,带动闭环链条位于外臂内部的另一侧向下移动,进而带动内臂在外臂向下移动的同时也进行向下移动。同理可知,外臂上移时,闭环链条发生逆时针转动,内臂在外臂向上移动的同时也进行向上移动。这种结构的伸缩臂结构简单,且仅由一个电机作为驱动源,体积小。同时内臂在向上或向下移动时,外臂也在同时进行向上或向下移动,使工作时内臂和外臂叠加在一起长度减小,不会占用过多的空间。
6.作为本实用新型的进一步改进是,固定座上设置有外臂导轨,外臂外部设置有外臂滑块,外臂滑块嵌入外臂导轨且能滑动。使外臂在固定座上移动时保持稳定。
7.作为本实用新型的进一步改进是,内臂上设置有内臂导轨,外臂内部设置有内臂滑块,内臂滑块嵌入内臂导轨且能滑动。使内臂在外臂上移动时保持稳定。
8.作为本实用新型的进一步改进是,内臂滑块有多个。进一步使内臂在外臂上移动保持稳定。
9.作为本实用新型的进一步改进是,内臂上设置有内臂固定块,内臂固定块与闭环链条位于外臂内部的一侧连接。内臂固定块使内臂和闭环链条稳定连接,进一步使内臂在
外臂上移动时保持稳定。
10.作为本实用新型的进一步改进是,内臂固定块有多个。进一步使内臂在外臂上移动保持稳定。
11.作为本实用新型的进一步改进是,外臂上设置有多个开口。方便观察内臂在外臂内滑动的状况。
附图说明
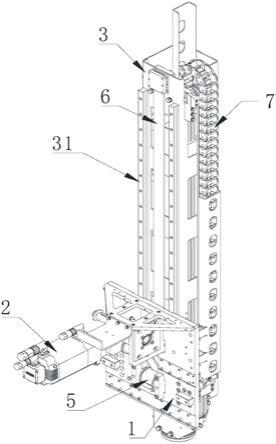
12.图1为本实施例的结构图;
13.图2为本实施例的仰视图。
14.图中:
[0015]1‑
固定座;2
‑
电机;3
‑
外臂;31
‑
外臂滑块;32
‑
内臂滑块;4
‑
内臂;41
‑
内臂导轨;5
‑
传动轴;6
‑
传输带;7
‑
闭环链条;8
‑
外臂导轨;9
‑
内臂固定块;10
‑ꢀ
下转动轴;11
‑
固定板。
具体实施方式
[0016]
下面结合附图对本实用新型的较佳实施例进行详细阐述,以使本实用新型的优点和特征能更易于被本领域技术人员理解,从而对本实用新型的保护范围做出更为清楚明确的界定。
[0017]
参见附图1
‑
2所示,本实施例一种伸缩臂,包括固定座1和滑动设置在固定座1上的外臂3,固定座1上设置有电机2,电机2的输出轴通过传动轴5与传输带6的一端连接,传输带6的另一端与外臂3连接,外臂3上转动设置有上转动轴和下转动轴10,上转动轴和下转动轴10之间套设有闭环链条7且闭环链条7能发生转动,闭环链条7的一侧位于外臂3外部且设置在固定座1上的固定板11套设在其上,外臂3内部滑动设置有内臂4,闭环链条7的另一侧位于外臂3内部且内臂4与其连接。
[0018]
将固定座1进行固定后,开启电机2,电机2输出轴转动,带动传输带6顺时针移动,带动外臂3在固定座1上进行下移。且由于固定座1是固定不动的,闭环链条7设置在外臂3上,外臂3下移时,闭环链条7位于外臂3内部的一侧在固定板11处发生转动而且二者之间产生摩擦,产生的摩擦力使外臂3上的闭环链条7发生顺时针转动。内臂4与闭环链条7位于外臂3内部的另一侧连接,闭环链条7转动,带动闭环链条7位于外臂3内部的另一侧向下移动,进而带动内臂4在外臂3向下移动的同时也进行向下移动。同理可知,外臂3上移时,闭环链条7发生逆时针转动,内臂4在外臂3向上移动的同时也进行向上移动。这种结构的伸缩臂结构简单,且仅由一个电机2作为驱动源,体积小。同时内臂4在向上或向下移动时,外臂3也在同时进行向上或向下移动,使工作时内臂4和外臂3叠加在一起长度减小,不会占用过多的空间。
[0019]
本实施例的固定座1上设置有外臂导轨8,外臂3外部设置有外臂滑块31,外臂滑块31嵌入外臂导轨8且能滑动。使外臂3在固定座1上移动时保持稳定。
[0020]
本实施例的内臂4上设置有内臂导轨41,外臂3内部设置有内臂滑块32,内臂滑块32嵌入内臂导轨41且能滑动。使内臂4在外臂3上移动时保持稳定。
[0021]
本实施例的内臂滑块32有多个。进一步使内臂4在外臂3上移动保持稳定。
[0022]
本实施例的内臂4上设置有内臂固定块9,内臂固定块9与闭环链条7位于外臂3内
部的一侧连接。内臂固定块9使内臂4和闭环链条7稳定连接,进一步使内臂4在外臂3上移动时保持稳定。
[0023]
本实施例的内臂固定块9有多个。进一步使内臂4在外臂3上移动保持稳定。
[0024]
本实施例的外臂3上设置有多个开口。方便观察内臂4在外臂3内滑动的状况。
[0025]
以上实施方式只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人了解本实用新型的内容并加以实施,并不能以此限制本实用新型的保护范围,凡根据本实用新型精神实质所做的等效变化或修饰,都应涵盖在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1