一种货到人仓储分拣系统的制作方法
1.本实用新型涉及仓储物流技术领域,特别是涉及一种货到人仓储分拣系统。
背景技术:
2.当前,基于移动货架的货到人式分拣系统已在大型电商公司的物流仓库中得到了广泛应用,其通过agv等运载工具将移动货架搬运至分拣工作站供人或分拣机器人拣选货物,可大大提升订单拣选效率。现有技术中,专利cn108527322a提供了一种拣选装置,其中,搬运机器人将储存有料箱的货架搬运到第一位置,取箱机器人从货架上取下目标货箱至拣货台,拣选机器人在拣货台处拣选货品。上述方案中,拣货台有两个拣货工位,取箱机器人每次在将货箱放置到一个拣选工位时,将另一个工位处拣选完成的货箱取走,如此循环作业,实现循环拣选,这种方案中,搬运机器人与拣选机器人往往难以得到协调,需要相互等待,如需要上的料箱较多时,取箱机器人需要等待拣选机器人将货物一个拣货工位的货箱拣选完成后才能取箱还回货架,另外有的时候,一个货架离开第一位置下一个货架还没到达第一位置时,则取箱机器人与拣选机器人都需要原地等待,会浪费时间。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本实用新型提供一种布局合理,使拣选作业更协调的货到人仓储分拣系统。
4.技术方案:为实现上述目的,本实用新型的货到人仓储分拣系统,其包括仓储区、分拣工作站及运载工具;
5.所述仓储区内用于存放移动货架,所述移动货架上装载有可取出的货物容器和/或货物;
6.所述分拣工作站具有第一停靠位、取货机器人以及分拣台;所述取货机器人能够对置于所述第一停靠位的所述移动货架进行取出、放回货物容器和/或货物的操作;
7.所述运载工具能够在所述仓储区及所述第一停靠位之间运载所述移动货架;
8.所述分拣台具有两条环形分拣线路,每条所述环形分拣线路上均具有第一输入位、分拣位以及返回位;所述第一输入位与所述返回位位于所述环形分拣线路的首尾两端,且两者位置相邻;
9.两条所述环形分拣线路对称布局,且两者上的两个所述分拣位位于两者对称中线的两侧。
10.进一步地,所述分拣台具有踢出位,两条所述环形分拣线路共用同一所述踢出位。
11.进一步地,所述分拣台包括第一线体及与所述第一线体平行设置的第二线体与第三线体;
12.所述第二线体与所述第三线体共线设置,且两者分别位于所述第一线体的对称中线的两侧;
13.所述第二线体的两端及所述第三线体的两端与所述第一线体之间均设置有转移
机构;
14.所述踢出位位于所述第一线体的一端。
15.进一步地,所述分拣台上方架设有第一缓存货架。
16.进一步地,还包括上架工作站,所述上架工作站包括第二停靠位、上架机器人以及上架工作台;
17.所述运载工具能够在所述仓储区及所述第二停靠位之间运载所述移动货架;
18.所述上架机器人用于对停靠在所述第二停靠位的所述移动货架进行上货作业。
19.进一步地,所述上架工作台具有主线体,所述主线体上依次具有上架操作位与第二接驳位;
20.所述上架机器人与所述第二停靠位置于所述第二接驳位旁。
21.进一步地,所述第二接驳位的上方具有第二缓存货架。
22.进一步地,所述上架操作位与所述第二接驳位之间设有剔除位,所述剔除位连接有支线体,且所述剔除位处设置有转移机构。
23.有益效果:本实用新型的货到人仓储分拣系统,通过设置两条环形分拣线路,并通过使两条环形分拣线路对称布局,使得两者的分拣位紧靠在一起,可方便人工或分拣机器人进行分拣,环形分拣线路上可缓存料箱,使得取货机器人与人工或分拣机器人不用相互等待,使得分拣过程更协调,可提高分拣效率。
附图说明
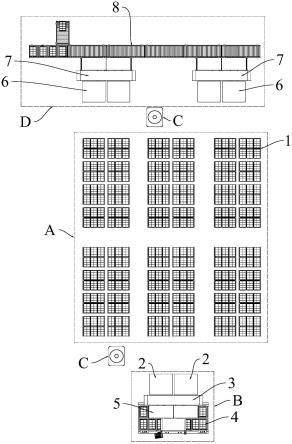
24.图1为货到人仓储分拣系统的构成图;
25.图2为分拣工作站的构成图;
26.图3为分拣台的俯视图;
27.图4为取货机器人的结构图;
28.图5为上架工作站的构成图;
29.图6为上架工作台的结构图。
30.图中:a-仓储区;1-移动货架;b-分拣工作站;2-第一停靠位;3-取货机器人;31-取货单元;32-双轴直角坐标机器人;33-框体;4-分拣台;41-第一输入位;42-分拣位;43-返回位;44-踢出位;l1-第一线体;l2-第二线体;l3-第三线体;5-第一缓存货架;c-运载工具;d-上架工作站;6-第二停靠位;7-上架机器人;8-上架工作台;81-主线体;82-上架操作位;83-第二接驳位;84-剔除位;85-支线体;9-第二缓存货架。
具体实施方式
31.下面结合附图对本实用新型作更进一步的说明。
32.如图1所示的货到人仓储分拣系统,其包括仓储区a、分拣工作站b、运载工具c及上架工作站d。
33.所述仓储区a内用于存放移动货架1,所述移动货架1上装载有可取出的货物容器和货物。其中,货物容器中用于存放货物,货物容器可以是专用的塑料料箱,也可以是货物出厂时自带的包装纸箱,塑料料箱或包装纸箱内容纳有特定数量的货物。对于大件货物,也可单独直接上架至移动货架1内。
34.如图2所示,所述分拣工作站b具有第一停靠位2、取货机器人3以及分拣台4;所述取货机器人3能够对置于所述第一停靠位2的所述移动货架1进行取出、放回货物容器和货物的操作。如图4所示,取货机器人3包括框体33,框体33内安装有取货单元31以及驱动取货单元31在竖直面内运动的双轴直角坐标机器人32,双轴直角坐标机器人32驱动取货单元31运动,以使取货单元31正对目标货位,取货单元31执行取出货物或放入货物的操作。本实施例中,框体33内具有两组取货单元31以及两组双轴直角坐标机器人32。在其他实施例中,取货机器人3也可以是带有机械爪手的工业机器人。
35.如图5所示,所述上架工作站d包括第二停靠位6、上架机器人7以及上架工作台8;所述上架机器人7用于对停靠在所述第二停靠位6的所述移动货架1进行上货作业。上架机器人7的结构与上述取货机器人3的结构一致,此处不复赘述。
36.所述运载工具c能够在所述仓储区a及所述第一停靠位2之间运载所述移动货架1,也能够在所述仓储区a及所述第二停靠位6之间运载所述移动货架1。本实施例中,运载工具c为潜伏式搬运agv。
37.具体地,如图3所示,所述分拣台4具有两条环形分拣线路,每条所述环形分拣线路上均具有第一输入位41、分拣位42以及返回位43;所述第一输入位41与所述返回位43位于所述环形分拣线路的首尾两端,且两者位置相邻;两条所述环形分拣线路对称布局,且两者上的两个所述分拣位42位于两者对称中线的两侧,且两个分拣位42相邻设置。
38.通过上述布局,由于两个分拣位42相邻设置,一个人工或分拣机器人可轮流对两条环形分拣线路上的货物进行分拣,如此可利用一个货物容器离开分拣位42且下一个货物或货物容器还没达到分拣位42之间的等待时间对另一条环形分拣线路上分拣台4处的货物进行分拣,提高分拣效率。此外,上述第一输入位41与所述返回位43位置相邻可方便取货机器人3拿走以及放回货物。
39.优选地,所述分拣台4具有踢出位44,两条所述环形分拣线路共用同一所述踢出位44。踢出位44用于将异常料箱与空料箱踢出至环形分拣线路之外。
40.具体地,所述分拣台4包括第一线体l1及与所述第一线体l1平行设置的第二线体l2与第三线体l3;所述第二线体l2与所述第三线体l3共线设置,且两者分别位于所述第一线体l1的对称中线的两侧;所述第二线体l2的两端及所述第三线体l3的两端与所述第一线体l1之间均设置有转移机构,转移机构采用现有技术,如可采用气缸推拉机构等现有的换线机构;所述踢出位44位于所述第一线体l1的一端。上述第一输入位41与返回位43均位于第一线体l1上,且返回位43紧靠第一线体l1的对称中线。两个环形分拣线路上的两个分拣位42分别位于第二线体l2与第三线体l3上,两个分拣位42处均具有转移机构。第一线体l1上其对称中线两侧的两部分可独立运转。
41.分拣时,取货机器人3将获取的货物或货物容器放置到第一输入位41,第一线体l1运转将货物或货物容器运送至转移机构所在位置,转移机构将货物或货物容器从第一线体l1推至第二线体l2,第二线体l2将货物或货物容器运送至分拣位42,人工或分拣机器人分拣完成后,转移机构将剩余的货物转移至第一线体l1上的返回位43,取货机器人3从返回位将剩余货物取走。
42.优先地,所述分拣台4上方架设有第一缓存货架5。第一缓存货架5用于放置热门货物,由于热门货物的调取频率高,将其放置在第一缓存货架5上,需要拣选时,取货机器人3
可直接从第一缓存货架5上获取货物或货物容器并将货物或货物容器运送至第一输入位41,分拣完成后,再从返回位43取走余下的货物并将余下的货物放回第一缓存货架5。当货物容器为空容器或货物容器存在异常,货物容器运行至第一线体l1上时,第一线体l1运转将有问题的容器向踢出位44输送。
43.进一步地,如图6所示,所述上架工作台8具有主线体81,所述主线体81上依次具有上架操作位82、剔除位84与第二接驳位83,第二接驳位83置于主线体81的侧边,主线体81上对应于第二接驳位83的位置设置有转移机构;所述上架机器人7与所述第二停靠位6置于所述第二接驳位83旁,上架机器人7从第二接驳位83获取货物或货物容器并上架至第二停靠位6处的货架上。
44.所述剔除位84连接有支线体85,且所述剔除位84处设置有转移机构。主线体81输送货物或货物容器时,若货物或货物容器存在异常,剔除位84处的转移机构将该货物或货物容器转移至支线体85。
45.优选地,所述第二接驳位83的上方具有第二缓存货架9。上架机器人7可将热门货物存储在第二缓存货架9上,上架机器人7也可以在货物对应的货架还未到达时,将该货物先存储到第二缓存货架9。
46.以上所述仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1