一种管道内两栖通用型管道监测机器人的制作方法
[0001]
本实用新型涉及物联网技术领域,特别是一种管道内两栖通用型管道监测机器人。
背景技术:
[0002]
管道机器人是一种工作于管道内的的两栖作业机器人。管道内环境狭窄复杂多为爬行机器人,无法在水位较高的管道内进行作业,无法在两栖环境内长时间作业,续航能力差,结构运转不够灵活,无法对管道内的堵塞物进行有效避障以及爬行,容易因堵塞物而卡在管道中。
技术实现要素:
[0003]
实用新型目的:本实用新型所要解决的技术问题是针对现有技术的不足,提供一种管道内两栖通用型管道监测机器人。
[0004]
为了解决上述技术问题,本实用新型公开了一种管道内两栖通用型管道监测机器人,包括主框架以及设置在主框架内的机器人本体,主框架顶部设有垂直推进器,主框架两侧分别设有第一履带式推进器和第二履带式推进器,主框架底部设有一组水平推进器,机器人本体分别控制垂直推进器、第一履带式推进器、第二履带式推进器以及一组水平推进器。
[0005]
本实用新型中,一组水平推进器分别为第一水平推进器、第二水平推进器和第三水平推进器,第一水平推进器位于主框架底部前端,第二水平推进器和第三水平推进器分别位于主框架底部后端两侧。
[0006]
本实用新型中,所述主框架包括底板和两侧板,第一履带式推进器和第二履带式推进器分别设置在两侧板的外侧,一组水平推进器设置在底板的底部。
[0007]
本实用新型中,所述主框架顶部设有设备舱,设备舱前端为透明保护罩。
[0008]
本实用新型中,所述设备舱底部设有水位传感器,用于对管道内水位进行检测。
[0009]
本实用新型中,所述设备舱的外部前端设有超声波测距装置,可以实现自动转弯及对管道内堵塞物的主动避障。
[0010]
本实用新型中,所述设备舱内设有低光相机,低光相机通过云台设置在设备舱内,,可以对管道内环境进行实时监测,成像数据可通过标配的后拖零浮力电缆实时传输至地面。
[0011]
本实用新型中,所述设备舱内设有一组射灯,通过透明保护罩照向外侧。
[0012]
本实用新型中,机器人本体两侧分别通过伸缩杆连接转动轮,转动轮外圈设有用于陆地行走的履带。
[0013]
本实用新型中,转动轮上分别设有0
°
连接孔,15
°
连接孔,30
°
连接孔以及45
°
连接孔。
[0014]
有益效果:一种管道内两栖通用型管道监测机器人,具备两栖运动能力,可在不同
半径、不同水位的管道内灵活活动。在有堆积物的管道内,可以通过履带行走。在管道直径较小,履带抵住两侧管道的情况下,可以改变转动轮角度,从而改变履带角度,使得履带在管道两侧壁上行走。
附图说明
[0015]
下面结合附图和具体实施方式对本实用新型做更进一步的具体说明,本实用新型的上述和/或其他方面的优点将会变得更加清楚。
[0016]
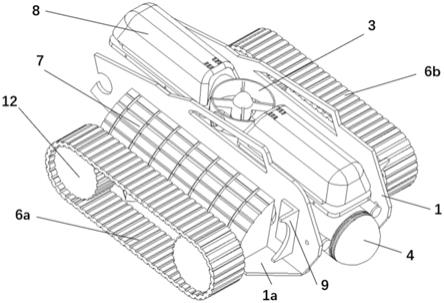
图1是本实用新型结构示意图;
[0017]
图2是本实用新型结构俯视图;
[0018]
图3是本实用新型结构正视图;
[0019]
图4是本实用新型结构侧视图;
[0020]
图5是转动轮示意图;
[0021]
图6是转动轮剖视图。
[0022]
图7是转动轮中部剖视图;
[0023]
图8是15
°
连接孔剖视图;
[0024]
图9是30
°
连接孔剖视图;
[0025]
图10是实施例2伸缩杆连接示意图;
[0026]
图11是实施例2底部示意图;
[0027]
图12是实施例2应用示意图。
[0028]
图中标记为:1、主框架:1a、主框架底板;1b、主框架侧板;2、水平推进器;3、垂直推进器;4、设备舱;5、射灯;6a、第一履带式推进器;6b、第二履带式推进器; 7、履带固定装置;8、保护罩;9、功能扩展装置。
具体实施方式
[0029]
实施例:
[0030]
本实施例提供的一种管道内两栖通用型管道监测机器人,包括1.主框架:1a.主框架底板;1b.主框架侧板;2.可收纳水平可收纳推进器;3.垂直推进器;4.设备舱;5.射灯; 6.可收纳水平履带式推进器;7.履带固定装置;8.保护罩;9.功能扩展装置。
[0031]
其中,主框架1为管道内两栖通用型管道监测机器人的骨架和支撑部件,主框架底板1a与主框架侧板1b通过电弧焊技术连接在一起,焊缝处贴有防水薄膜。
[0032]
水平可收纳推进器2共有三个,安装于机身后侧的两个角2b、2c和机身前部中央 2a,用于控制机器人在水位较高的管道内的活动;机身后侧两个角的水平可收纳推进器2b、2c为固定水平可收纳推进器,机身前部中央的水平可收纳推进器2a为可旋转水平可收纳推进器;当后侧的左右两个水平可收纳推进器2b、2c以相同转速同向转动且机身前部中央的水平可收纳推进器2a方向朝向正前方时,机器人可实现直线前进或后退;当后侧的左右两个水平可收纳推进器2b、2c以差速转动且机身前部中央的水平可收纳推进器2a朝向旋转方向作辅助旋转时,机器人可实现任意半径转弯;当管道内水位较低时,水平可收纳推进器2a、2b、2c收纳至主框架底板1a上方,停止运转。所述垂直推进器3共有一个,设置于主体框架的中间位置,可以控制机器人的沉浮。
[0033]
本实例可收纳水平推进器采用超小型qdt型潜水推进器,垂直推进器采用中型 qdt型潜水推进器。
[0034]
本实施例的机器人本体,控制系统包括微处理器和时钟电路,时钟电路与微处理器连接;所述时钟电路为12mhz的石英晶振,所述微处理器为stm32系列单片机或者stc52系列的单片机芯片。
[0035]
动力系统包括电机驱动电路、电机和扭矩传感器;所述电机驱动电路的输入端与控制器模块连接;所述电机驱动电路的输出端与电机连接;所述扭矩传感器的检测端与与电机连接,扭矩传感器的输出端与控制器模块连接。扭矩传感器为tq-660轴式扭矩传感器或者tq-660f扭矩传感器。电机驱动电路为3路继电器电路。
[0036]
自动避障采用espduino单片机,通过超声波测距系统判断前方障碍物的距离并与安全距离进行比较,并采取相应的避障策略,最后通过pwm驱动电路驱动电动机完成相应的转弯避障动作,实现机器人的自动转弯及自主避障。
[0037]
水平可收纳履带式推进器6共有两个,安装于左右主框架的侧板处的履带固定装置7上,由可伸缩金属杆连接,金属杆与履带连接处为圆柱体齿轮,金属杆内安装有电线控制圆柱体齿轮内电动机转速以控制履带运转速度,金属杆与履带固定装置连接处装有压力传感器,本实施例压力传感器采用蚌埠力业公司的pt301型号的产品,用于控制机器人在陆地上或是在水位较低的管道内进行探测时的进退和转弯。
[0038]
履带固定装置7为一圆弧柱体,底端固定于主框架底板1a上,侧端固定于主框架侧板上,有电线通过侧板预留的孔眼与机器人主控板相连,用于传输信号。履带的转动轮经可伸缩金属杆固定于履带固定装置上,连接处安装有压力传感器。
[0039]
如图5,转动轮12包括转动轮内固定轮12a和转动轮活动部分12b,转动轮内固定轮12a安装于转动轮活动部分12b内部,由输出轴16相连接,其余接触部分涂抹有润滑油,运行时转动部分12b带动履带14转动而固定轮12a固定不转;固定轮12a设有一组连接孔与机器人本体连接,固定轮轮内置电机13,通过电线15连接到机器人本体,通过输出轴16与转动轮活动部分12b的驱动柄17连接,转动轮12外侧与履带14 啮合。
[0040]
如图6和图7,伸缩金属杆11与转动轮连接处设有内伸的0
°
连接孔10a,15
°
连接孔10b,30
°
连接孔10c,45
°
连接孔10d,0
°
连接孔10a为水平横孔,15
°
连接孔 10b,30
°
连接孔10c,45
°
连接孔10d均为水平向下的角度孔,孔内附有固定金属杆的金属卡口,与齿轮内电动机连通,可根据不同半径人工改变金属杆与可收纳履带式推进器6之间的角度,左右两侧的履带式推进器6可以在运行过程中根据管道半径的不同由压力传感器参数自动设定伸缩长度,以适应在不同半径的管道内活动;当左右两侧的履带式推进器6以相同转速同向运转时,机器人可实现直线前进或后退;当左右两侧的履带式推进器6以差速运转时,机器人可实现任意半径转弯;当管道内水位较高时,可伸缩金属管收缩至最短处,即水平可收纳履带式推进器6收纳至紧贴履带固定装置7上,停止运转。图8为15
°
连接孔10b;图9为30
°
连接孔10c。电机13 的接电线穿过伸缩杆以及连接孔接电。
[0041]
为了避免在上升时,保护罩8的阻力,在本实施例中,保护罩8的顶部保护侧为弧面,减少在水中运动的阻力,本实施例保护罩采用低密度复合热塑性塑料。
[0042]
超声波测距装置安装于设备舱4外部前端,本实施例超声波测距装置采用特加特科技有限公司的hc-sr04型号的产品,可以实现自动转弯及对管道内堵塞物的主动避障。
[0043]
低光相机与云台通过固定支架安装在设备舱4内,安装位于设备舱4的前部,设备舱4的前端设有透明保护罩,透明保护罩为pc透明保护罩,pc透明保护罩空间利用率高,透光性好,透明保护罩下方左右两侧安装有射灯5,可以帮助低光相机及时记录近距离地环境,及时采相和记录,了解周围的环境。
[0044]
低光相机4为cmos摄像机,摄像机内配置a20双核处理器,a20处理器上搭载 linux操作系统,与cmos摄像机的系统相连,实现数据的快速传输和处理,监测数据可通过标配的零浮力缆实时传输至地面,便于寻找管道破裂点以降低泄露损失,零浮力缆安装于设备舱4后部,与主控板直接连接;设备舱4的后方设有电池装置,为低光相机和超声波测距装置供电。
[0045]
水位传感器7安装于设备舱4下方,本实施例水位传感器7采用神东工矿公司的 guy10型号的产品,用于对管道内水位进行检测,如果水位低于或高于一定限度,将会实现可收纳水平可收纳推进器和可收纳水平履带式推进器的使用切换。
[0046]
功能扩展装置9安装于左右主框架侧板1b前部,功能扩展装置9为功能扩展板,用于扩展机器人功能,通过螺栓连接或者焊接可安装机械臂、喷洒器、水质检测装置等。
[0047]
本实施例配合外部的两栖监测器、地面中继器、后拖零浮力缆、地面指挥工作。机身标配低光摄像机和3000流明的led光源,可供水下照明,监测数据可通过标配的后拖零浮力缆实时传输至地面。
[0048]
本实施例为实现管道内环境监测,搭载超声波测距装置,可实现自动转弯及自动避障。
[0049]
实施例2:
[0050]
如图10,本实施例将伸缩杆11插入45
°
连接孔10d,使得履带如图11,履带底部向两侧倾斜,在管道内如图12履带贴着管道两侧壁行进。
[0051]
本实用新型提供了一种管道内两栖通用型管道监测机器人的思路及方法,具体实现该技术方案的方法和途径很多,以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。本实施例中未明确的各组成部分均可用现有技术加以实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1