一种基于惯性传感器的膝关节外骨骼运动监测方法与流程
1.本发明涉及一种基于惯性传感器的膝关节外骨骼运动监测方法,属于新型外骨骼设计领域。
背景技术:
2.轻负载助力型外骨骼,作为一种新型外骨骼以更高的机动性和更小的能量消耗逐渐受到各方的关注和研究。相比于传统的重载型外骨骼对于人体四肢提供全面的助力,轻负载助力外骨骼大多针对某个或某几个特定关节提供助力。为了降低外骨骼重量,提高系统机动性,轻负载外骨骼多以电机驱动,带动柔性或者轻刚性结构运动;同时降低电机的扭矩,不在以电机作为主要动力带动人体和外骨骼运动,而是以使用者动作作为主要动力,外骨骼在使用者肌肉发力时,为特定肌肉群提供辅助动力,从而提高使用者运动效果,降低使用者运动消耗。比起传统的重载外骨骼,轻负载外骨骼更注重控制系统对于人体运动的感知,控制系统需要在特定的时间对关节相关肌肉群提供相应的辅助扭矩。对于助力区间和助力大小的感知成为优化轻负载外骨骼助力效果重要因素,检测使用者的运动状态成为一个关键技术。
3.膝关节外骨骼作为针对某一特殊关节的轻负载外骨骼,可以为穿戴者在行走和攀登楼梯过程中提供助力。行走和上楼梯过程作为人类腿部行走主要面对情况,可以作为参考近似模拟人类大部分腿部活动情况。膝关节外骨骼未来可以应用于助老助残、野外行军、登山探险、消防救援。
4.目前现有的膝关节外骨骼感知方式主要是采用下肢外骨骼的感知方式,即在大腿、小腿和脚部安装惯性传感器,这种方式在实验室中证明是有效的,但是对于膝关节外骨骼需要额外安装脚部感知模块,这对膝关节产品化提出一定挑战,这种设计将会使得产品结构更加复杂。但如果不使用脚部传感器模块就会导致感知精度下降,从而在数据精度上影响控制算法的决策。
技术实现要素:
5.本发明解决的技术问题是:针对目前现有技术中,膝关节外骨骼运动监测方法的缺陷,提出一种基于惯性传感器的膝关节外骨骼运动监测方法。
6.本发明解决上述技术问题是通过如下技术方案予以实现的:
7.一种基于惯性传感器的膝关节外骨骼运动监测方法,步骤如下:
8.(1)将惯性传感器按指定安装方向安装于腿部外骨骼外侧;
9.(2)根据角度计测量腿部外骨骼大腿部分与小腿部分连接处角度,并测量穿戴者下肢尺寸,于矢状面上推算穿戴者下肢实时运动位置,生成穿戴者关节及腿部末端,即不包括脚掌的足踵处运动轨迹,根据所得运动轨迹生成连杆结构;
10.(3)通对小腿部分外骨骼传感器采集的加速度数据进行积分,获得小腿部分外骨骼运动轨迹,根据所得运动轨迹推算脚掌运动轨迹;
11.(4)将步骤(2)、步骤(3)所得运动轨迹进行合并处理,获取下肢整体运动轨迹。
12.所述惯性传感器三轴安装方向分别为:前进方向、垂直于矢状面方向、垂直于地面方向。
13.所述关节及腿部末端运动轨迹、脚掌运动轨迹的步态周期相同,一个单脚步态周期中:
14.根据惯性传感器垂直于矢状面的轴的角速度进行判断,确定分割腿部外骨骼的步态周期的分割时间点,在外骨骼单脚运动过程中,以支撑态中点为步态周期起点,于步态周期开始时,同时记录加速度数据积分数据、下肢末端位置数据;步态周期结束后,根据下肢末端最大距离、计算所得积分结果获取最终步幅长度。
15.所述积分数据由步态周期起点开始计算记录,直至脚掌无安全离开地面为止;步态周期结束前,根据记录的积分数据计算积分结果。
16.所述积分数据根据加速度积分计算获得,通过归零修正方法,于每个步态周期中选取特定时间段运动轨迹,根据传感器垂直于矢状面方向角速度进行近似转化,并于下一步态周期重新计算以避免步态周期误差的累计。
17.本发明与现有技术相比的优点在于:
18.本发明提供的一种基于惯性传感器的膝关节外骨骼运动监测方法,通过几何方法和运动学积分方式的结合,对下肢运动状态进行分析,合成精确度更高的步态数据,并利用多轴惯性传感器不同功能的复合使用,对人体行走步态周期中,各个时间点进行判断,可以在不增加脚部传感器的情况下,通过腿部传感器近似推测脚部运动,同时安装于外骨骼结构上,不需要添加额外结构。
附图说明
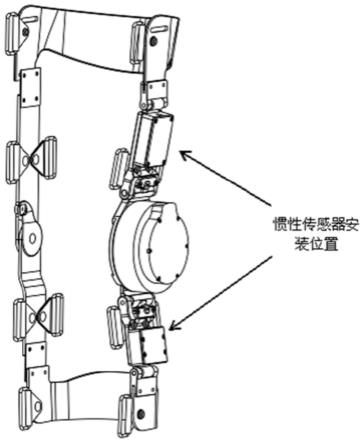
19.图1为发明提供的膝关节外骨骼惯性传感器安装示意图;
20.图2为发明提供的人体下肢运动解算图;
21.图3为发明提供的脚部运动解算于imu运动轨迹关系图;
22.图4为发明提供的行走中角速度曲线选取积分区间示意图;
23.图5为发明提供的上楼梯时角速度曲线选取积分区间示意图;
具体实施方式
24.一种基于惯性传感器的膝关节外骨骼运动监测方法,具体用于监测使用者在使用外骨骼过程中的运动数据采集和分析,可实现对步长、步频、步速和坡度等数据的测量,从而反馈给控制系统,具体监测流程如下:
25.(1)将惯性传感器按指定安装方向安装于腿部外骨骼外侧;
26.其中,惯性传感器三轴安装方向分别为:前进方向、垂直于矢状面方向、垂直于地面方向;
27.(2)根据角度计测量腿部外骨骼大腿部分与小腿部分连接处角度,并测量穿戴者下肢尺寸,于矢状面上推算穿戴者下肢实时运动位置,生成穿戴者关节及腿部末端运动轨迹,根据所得运动轨迹生成连杆结构;
28.(3)通对小腿部分外骨骼传感器采集的加速度数据进行积分,获得小腿部分外骨
骼运动轨迹,根据所得运动轨迹推算脚掌运动轨迹;
29.其中,关节及腿部末端运动轨迹、脚掌运动轨迹的步态周期相同,一个单脚步态周期中:
30.根据惯性传感器垂直于矢状面的轴的角速度进行判断,确定分割腿部外骨骼的步态周期的分割时间点,在外骨骼单脚运动过程中,以支撑态中点为步态周期起点,于步态周期开始时,同时记录加速度数据积分数据、下肢末端位置数据;步态周期结束后,根据下肢末端最大距离、计算所得积分结果获取最终步幅长度;
31.积分数据由步态周期起点开始计算记录,直至脚掌无安全离开地面为止;步态周期结束前,根据记录的积分数据计算积分结果;
32.积分数据根据加速度积分计算获得,通过归零修正方法,于每个步态周期中选取特定时间段运动轨迹,根据传感器垂直于矢状面方向角速度进行金丝转化,并于下一步态周期重新计算以避免步态周期误差累计;
33.(4)将步骤(2)、步骤(3)所得运动轨迹进行合并处理,获取下肢整体运动轨迹。
34.下面根据具体实施例进行进一步说明:
35.在当前实施例中,膝关节外骨骼由4个9轴惯性传感器组成,这9轴分别为三轴加速度,三轴角速度,三轴角度。在外骨骼行走中,将惯性传感器安装于腿部外侧,通过9轴数据的实时采集,可以使用矢状面的角度计搭建出人体行走的实时下肢杆状图。并通过角速度判断步态状态,并通过加速度积分计算由脚部运动引起的位移。
36.如图1所示,传感器分别安装与腿外侧外骨骼结构上,安装方式如图中箭头所指模块所示。传感器的三个轴有固定的安装方向,一个轴指向前进方向,一个轴垂直于矢状面,另一个轴垂直于地面。
37.安装不可避免的出现角度误差,所以本方法通过初始化算法对传感器坐标轴进行修正,目标是到达既定安装方向。
38.如图2所示,根据角度计测量的大腿与小腿处角度和穿戴者下肢尺寸,在矢状面上推算人体下肢实时运动位置,并生成关节及腿部末端运动轨迹,根据实验结果生成的连杆结构。
39.通过对特定时间点的监测,本方法可以判定两个步态周期间的分割点。如图4、5所示,根据惯性传感器垂直于矢状面的轴的角速度可以判断出使用者的行走过程中的某些特定时间点,并将其中一个时间点用于分割步态周期。
40.步态周期设定,对于单脚的周期,实时监控系统以支撑态中点作为起点,在这一时间点加速度为零。在一个步态周期开始时,同时记录积分数据和下肢末端位置数据。积分由周期起点开始计算,到脚掌完全离地为止,然后步态周期还未结束,在这段时间中,计算积分结果;当步态周期结束后,下肢末端最大距离加上转换后的积分结果,可认为是最终步幅长度。对于双脚周期,可通过设定,两脚的周期起点都可以作为双脚周期起点,另一只脚周期终点作为终点。
41.积分周期判定:根据图4角速度图像可以用找到用以推断脚部运动的积分周期,从黑色点(支撑态中点)开始,在红色星号(脚掌离地)时结束,通过积分可以获得惯性传感器运动轨迹。图5为上楼梯过程中设定的积分周期,与走路过程同理。
42.积分误差去除:由加速度积分所生成的运动轨迹有误差累计问题,随着积分长度
增加误差不断累计。为避免误差累计问题,采用归零修正方法,根据角速度在每一个步态周期中选取特定时间段运动轨迹进行近似转换,并在下一步态周期依照相同方式重新计算,避免以往步态周期误差累计。在步态周期的积分选取中,为了避免由初速度计算造成的累计误差,将总积分时间段初始点提前,由速度趋近于零的时间点开始积分,从而避免对于初速度的依赖从而避免累计误差。
43.如图3所示,可以根据脚踝部几何关系,近似将惯性传感器运动轨迹推算出踝关节运动(即脚部运动)轨迹。传感器位移与下肢末端关节位移转换关系:假设踝关节转动角度忽略不计,根据身体尺寸和外骨骼尺寸,可以获得传感器与脚趾关节(旋转轴)的位置,从而传感器位移和下肢末端位移变成角度相同而半径不同的比例弧长关系,从而根据身体尺寸可以推断出下肢末端的近似位移。
44.最终将有连杆结构推断出的腿部末端运动轨迹与近似脚部运动轨迹结合,就可以完整估算一个步态周期中下肢的运动距离即步幅,根据步态周期的时长可以推测出此步态周期的步速。同理可应用于上楼梯过程,可以获得迈步高度和楼梯斜率等数据。
45.本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
46.本发明说明书中未作详细描述的内容属于本领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1