一种刚柔耦合的爪刺抓附装置
1.本发明涉及一种刚柔耦合的爪刺抓附装置,属于机械技术领域。
背景技术:
2.随着科学技术的不断进步和发展,机械工程技术已经广泛应用于工业,农业和医疗等各个领域中。同时,在当前工作需求越来越多样化的情况下,例如灾难搜寻,岩壁攀爬,军事侦察等,工程研究的领域已经不再局限于结构环境下的定点作业。未来的技术不仅要可以正在在目前简单,结构化的环境中工作,而且也需要去适应复杂,非结构化的工作环境,但目前的技术很难做到在复杂的环境中稳定工作,所以,实现可以在非结构化环境中自主工作的三维无障碍工作将是未来研究的主要发展趋势之一。
3.近些年,国内外就开展了大量的研究工作,例如在美国darpa biodynotics program的支持下,路易克拉克大学,斯坦福大学,加利福尼亚大学伯克利分校,卡耐基梅隆大学,宾夕法尼亚大学以及美国波士顿动力公司组成rise项目组,联合开发rise爬壁机器人平台。斯坦福大学率先研制出爪刺抓附的爬壁机器人spinybotii,美国波士顿动力公司研制出了三代rise系列的仿生爪刺式爬壁机器人,从rise v1到rise v3。宾利法尼亚大学研发出dynoclimber平台,专注于刚性爪刺爬壁机器人,研发出icraos和bob等爬壁机器人。加利福尼亚大学伯克利分校在其研制的六足爬行机器人dash的基础上,研制了clash爬壁机器人。国内虽起步较晚但也有许多高校及研究所开展相应研究工作,如哈尔滨工业大学,南京邮电大学,南京航空航天大学,中国科学技术大学,中国科学院合肥物质科学研究所等。
技术实现要素:
4.本发明针对目前非结构化作业的空缺和不足,从抓取和抓附两个角度研究,克服结构化作业的缺点,只能抓取形状固定的物体或抓附特定粗糙的壁面,为了扩展更大作业范围,提出了一种刚柔耦合的爪刺抓附装置,增加其抓附性能。
5.为达到上述目的,本发明采用如下的技术方案:
6.一种刚柔耦合的爪刺抓附装置,包括固定外壳、刚柔耦合爪刺组、滑动导轨和驱动拉杆,所述固定外壳的下端固定安装滑动导轨,刚柔耦合爪刺组的中部与滑动导轨铰链而上端连接驱动拉杆,驱动拉杆安装在固定外壳腔内;所述固定外壳分为三部分:上部为握柄、中部为导轨壳、下部为底座,三者通过螺栓进行固连。
7.优选地,所述刚柔耦合爪刺片组与滑动导轨的滑动轴通过螺栓固连,爪刺片跟随滑动轴在导轨内做滑动,所述滑动导轨与固定外壳通过螺栓固连,所述驱动拉杆与固定外壳通过限位结构限制驱动拉杆的活动自由度,只能上下做滑动,所述驱动拉杆与滑动导轨的滑动轴的另一端通过坚韧的拉线以及弹簧做连接,拉伸驱动拉杆,滑动轴通过丝线和弹簧的牵引受力被拉动。
8.优选地,所述刚柔耦合爪刺片,包括三部分刚性结构、三部分柔性结构以及三枚爪
刺,刚性结构和柔性结构通过一体化打印进行连接,爪刺通过强力胶水固定于刚性结构的凹槽内。
9.优选地,所述滑动导轨包括导轨固定架、滑动轴座、滑动轴、滚轮,所述导轨固定架下端和滑动轴座通过螺栓连接,有相对的旋转自由度。所述导轨固定架上端和滚轮通过螺栓连接,滚轮可绕导轨固定架上端旋转。滑动轴两端有内螺纹孔,一端通过螺栓连接爪刺片组,另一端连接拉线和弹簧。
10.优选地,所述驱动拉杆一端为拉柄,另一端有多个内螺纹孔,连接弹簧和拉线,驱动拉杆为唯一驱动结构,通过手的拉动,驱动拉杆向上滑动,通过弹簧和拉线拉动爪刺片组收缩。
11.优选地,所述固定外壳分为三部分,下部底座、中部导轨壳和上部握柄,三部分通过螺栓固连。下部底座和滑动导轨通过螺栓固连。中部导轨壳与上部握柄共同约束驱动拉杆的自由度和工作空间。
12.优选地,所述爪刺抓附装置,驱动拉杆有一个自由度,滑动导轨有三个自由度,爪刺片组有一个自由度。
13.优选地,爪刺抓附装置设计了三组爪刺片组,但仍可以设计更多组的爪刺片组,如果扩大组数,固定外壳的整体尺寸需要按固定滑动导轨数量重新计算设计,但基本上只有尺寸上的修改,增加爪刺数量,可以增大爪刺装置的抓附性能。
14.与现有技术相比,本发明具有如下显而易见的突出实质性特点和显著的优点:
15.1、本发明采用刚柔耦合的爪刺片结构,解决了绝大多数抓附装置顺应性不够的问题;
16.2、本发明采用鱼钩作为爪刺尖端,小尺寸高强度使得可抓附面的粗糙度变小,提高了抓附的所允许的粗糙度范围;
17.3、本发明摒弃传统的单侧或对抓抓附,采用多组对称的爪刺组抓附,使得被抓物体或表面受到的爪刺的抓附力是完全对称平衡的,抓附无需如传统抓附需要考虑抓附角度和位置。
附图说明
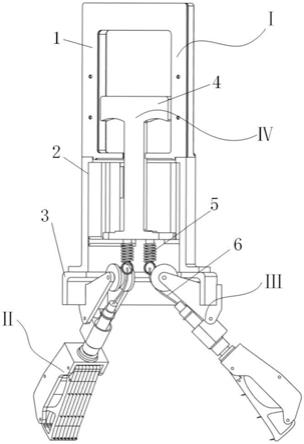
18.图1是本发明一种刚柔耦合的爪刺抓附装置结构示意图。
19.图2是本发明抓附装置剖面结构示意图。
20.图3是本发明的多个爪刺片组成的爪刺片组结构示意图。
21.图4是本发明滑动导轨结构示意图。
22.图5是本发明单片爪刺结构示意图。
23.图6是本发明抓附装置张开和抓取的示意图。
具体实施方式
24.下面结合附图进一步详细说明本发明优选实施例的具体结构和工作原理。
25.实施例一:
26.参见图1,一种刚柔耦合的爪刺抓附装置,包括固定外壳ⅰ、刚柔耦合爪刺组ⅱ、滑动导轨ⅲ和驱动拉杆ⅳ,所述固定外壳ⅰ的下端固定安装滑动导轨ⅲ,刚柔耦合爪刺组ⅱ的
中部与滑动导轨ⅲ铰链而上端连接驱动拉杆ⅳ,驱动拉杆ⅳ安装在固定外壳ⅰ腔内;所述固定外壳ⅰ分为三部分:上部为握柄1、中部为导轨壳2、下部为底座3,三者通过螺栓进行固连。
27.本实施例刚柔耦合的爪刺抓附装置扩展了更大作业范围,增加其抓附性能,在粗糙表面上具有很好的自适应性,抓附性能更加优越。
28.实施例二:
29.本实施例与实施例一进步相同,特别之处如下:
30.所述刚柔耦合爪刺组ⅱ的结构是:共有三个爪刺组,每个爪刺组有多个爪刺片9,通过3个安装孔8安装螺栓,固定在爪刺固定架7上边;刚柔耦合爪刺片9,由一体化3d打印制成,由三块刚性结构14、三块柔性结构15以及鱼钩16组成,刚性结构14和柔性结构15通过一体化打印粘合在一起,鱼钩16通过强力胶水固定于刚性结构14上的凹槽。
31.所述滑动导轨ⅲ包括导轨固定架10、滚轮11、滑动导轨座12、滑动轴13,滚轮11和滑动导轨座12安装在导轨固定架10上,滑动轴13安装在滑动导轨座12上。
32.所述驱动拉杆ⅳ滑配安装在固定外壳ⅰ内,通过固定外壳ⅰ限制活动自由度,只留一个上下移动的自由度,驱动拉杆4的底座固连弹簧5,以及弹簧5上连接拉线6;拉线6绕过滚轮11而连接滑动轴13的上端。
33.所述驱动拉杆ⅳ控制爪刺组ⅱ的抓附和张开:在未抓附时,驱动拉杆ⅳ未受到拉力,爪刺组ⅱ为张开状态;当抓附时,驱动拉杆ⅳ受到拉力的作用,向上拉伸,带动爪刺组ⅱ收缩,进而完成抓取动作。
34.本实施例采用刚柔耦合的爪刺片结构,解决了绝大多数抓附装置顺应性不够的问题;本实施例采用鱼钩作为爪刺尖端,小尺寸高强度使得可抓附面的粗糙度变小,提高了抓附的所允许的粗糙度范围;本实施例摒弃传统的单侧或对抓抓附,采用多组对称的爪刺组抓附,使得被抓物体或表面受到的爪刺的抓附力是完全对称平衡的,抓附无需如传统抓附需要考虑抓附角度和位置。
35.实施例三:
36.如图2所示,一种刚柔耦合的爪刺抓附装置,包括固定外壳ⅰ,刚柔耦合爪刺组ⅱ,和滑动导轨ⅲ,驱动拉杆ⅳ。固定外壳分ⅰ为三部分,为上部握柄1、中部导轨壳2、下部底座3,三者通过螺栓进行固连。驱动拉杆4的底座被中部导轨壳2限制自由度仅为上下的滑动自由度,并限制底部位移,驱动拉杆4的中轴被上部握柄1二次约束,防止倾斜,驱动拉杆4的顶部拉柄被上部握柄1限制顶部位移,通过固定外壳ⅰ的限制,驱动拉杆4为上下50cm内移动的活动范围。
37.如图3所示,为刚柔耦合爪刺组ⅱ,每个爪刺组有多个爪刺片9组成,通过3个安装孔8安装螺栓,固定在爪刺固定架7上边,限制爪刺片的大范围移动。
38.如图2、图3和图4所示,弹簧5一端通过螺栓固连在驱动拉杆4的底座上,弹簧5的另一点连接拉线6,拉线6的另一端连接滑动轴13,从驱动拉杆4到滑动轴13,形成一体拉伸结构,滑动导轨ⅲ中,导轨固定架10通过螺栓固定在下部底座3上,滚轮11通过螺栓固定在导轨固定架10上,可绕轴线转动,拉线6在拉伸时可在滚轮11上滑动,滑动导轨座12通过螺栓连接在导轨固定架上,滑动导轨座可绕轴线转动,有一个转动自由度,滑动轴13套在滑动导轨座12上,滑动轴13通过螺纹孔固连到爪刺固定架7上,所以当驱动拉杆4拉动时,滑动轴13会拉动爪刺组ⅱ整体往内侧收缩。
39.如图5所示,该结构为该发明的核心设计,刚柔耦合爪刺片9,由一体化3d打印完成,由三块刚性结构14、三块柔性结构15以及鱼钩16组成,刚性结构14和柔性结构15通过一体化打印粘合在一起,鱼钩16通过强力胶水固定于刚性结构14上的凹槽。
40.如图6所示,两张图片为爪刺抓附装置的使用过程,在未抓附时,驱动拉杆4未受到拉力,爪刺组ⅱ为张开状态,当抓附时,驱动拉杆4受到拉力的作用,向上拉伸,带动爪刺组ⅱ收缩,进而完成抓取动作。
41.本实施例表述了爪刺抓附装置的结构说明和运行机制,能够抓附在较大范围内粗糙度表面上,因爪刺刚柔耦合的设计机制,该发明能够自适应复杂的非结构化表面,提升抓附性能。设计添加了3组爪刺组,如果为了提高抓附性能,对尺寸进行调整,可以继续添加多个爪刺组。本实施例采用鱼钩作为爪刺尖端,小尺寸高强度使得可抓附面的粗糙度变小,提高了抓附的所允许的粗糙度范围。
42.上面对本发明实施例结合附图进行了说明,但本发明不限于上述实施例,还可以根据本发明的发明创造的目的做出多种变化,凡依据本发明技术方案的精神实质和原理下做的改变、修饰、替代、组合或简化,均应为等效的置换方式,只要符合本发明的发明目的,只要不背离本发明的技术原理和发明构思,都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1