一种爬升装置及具有该爬升装置的机器人的制作方法
1.本实用新型涉及机器人技术领域,特别是涉及一种爬升装置及具有该爬升装置的机器人。
背景技术:
2.当今世界人口激增,为了有效利用有限的地面空间,人们越来越往高处发展,各种高楼大厦、阶梯教室、会议厅、体育场看台等包括楼梯的建筑越来越常见,楼道清洁的工作明显增加,这方面的市场需求应运而生。另一方面,已走进人们日常生活的清洁机器人绝大多数是室内平地清洁机器人,因此有必要研究开发楼梯清洁机器人,目前能够爬楼梯的结构主要包括:轮式、履带式、腿式、翻滚式。其中履带式与翻滚式结构复杂,难以设计清洁装置,同时履带式爬升时接触受力点多在阶梯直角突出处,易损伤阶梯直角,且要求阶梯坡度相对低,不适合坡度较高的阶梯,易倾倒。轮式爬楼机器人较多采用行星轮或其它复合轮式,结构庞大复杂,成本高,也很少兼顾楼梯清扫功能,实用性大打折扣。
3.因此,亟需设计一种用于爬升装置及具有该爬升装置的机器人来克服现有技术的不足。
技术实现要素:
4.本实用新型为达到上述技术目的所采用的技术方案是:一种爬升装置,其特征在于,包括:支撑主体、第一爬升部、第二爬升部;所述第一爬升部滑动设于所述支撑主体的一侧,所述第二爬升部滑动设于所述支撑主体远离所述第一爬升部的一侧,所述支撑主体的两侧上分别设有爬升齿条,所述第一爬升部和所述第二爬升部内分别设有爬升电机,所述爬升电机的输出端分别与对应的所述爬升齿条传动连接,所述支撑主体内还设有前行机构,所述爬升齿条分别与所述前行机构固定连接,所述前行机构用于带动所述爬升齿条滑动。
5.在一个优选的实施例中,所述前行机构包括:第一支撑架、第二支撑架,所述第一支撑架和所述第二支撑架上下间隔设置于所述支撑主体内,所述第一支撑架的一端设有第一前行电机,另一端设有第一转轮,所述第一前行电机和所述第一转轮之间设有第一传动件;第二支撑架的一端设有第二前行电机,另一端设有第二转轮,所述第二前行电机和所述第二转轮之间设有第二传动件,所述第一传动件上固定设有第一滑块,所述第二传动件上固定设有第二滑块,所述第一滑块和所述第二滑块分别与对应的所述爬升齿条固定连接。
6.在一个优选的实施例中,所述第一支撑架的两侧上分别设有第一固定杆,所述第一滑块的两端分别与所述第一固定杆滑动连接,所述第二支撑架的两侧上分别设有第二固定杆,所述第二滑块的两端分别与所述第二固定杆滑动连接。
7.在一个优选的实施例中,每个所述爬升齿条上皆设有滑槽,所述第一爬升部和所述第二爬升部的底部分别设有卡块,所述卡块与所述滑槽配合,可在所述滑槽内滑动,所述爬升电机远离输出端的一端分别与对应的卡块固定连接。
8.在一个优选的实施例中,每个所述爬升齿条的两端上皆设有朝内的定位块。
9.在一个优选的实施例中,所述第一爬升部和所述第二爬升部皆呈矩形,所述第一爬升部和所述第二爬升部的长度等于或大于所述支撑主体的长度,所述第一爬升部和所述第二爬升部的底面及侧面皆设有清扫片。
10.在一个优选的实施例中,所述第一爬升部和第二爬升部内皆设有配重块。
11.在一个优选的实施例中,所述第一爬升部和第二爬升部的底面上分别还设有横向位移机构。
12.在一个优选的实施例中,所述第一爬升部和第二爬升部的一端上分别设有感应器。
13.本实用新型的第二方面提供一种机器人,所述机器人包括上述实施例中任一项所述的爬升装置。
14.本实用新型的有益效果是:本实用新型通过在支撑主体的两侧上分别设置爬升齿条,实现第一爬升部和第二爬升部的上升抬起动作;同时通过在支撑主体内设置前行机构,实现第一爬升部和第二爬升部的前进动作,通过爬升齿条和前行机构之间的相互配合,实现台阶的爬升,结构设计合理,简单,实施方便,生产成本低廉。
附图说明
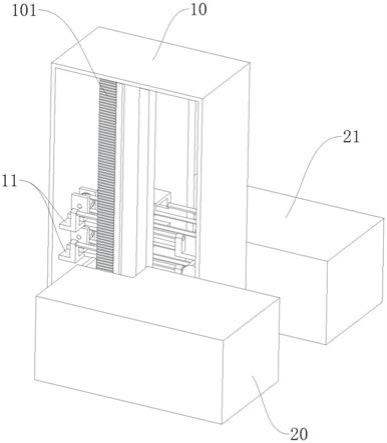
15.图1为本实用新型的结构示意图;
16.图2为本实用新型爬升齿条的结构示意图;
17.图3为本实用新型第一爬升部的结构示意图;
18.图4为本实用新型第一支撑架的结构示意图;
19.图5为本实用新型第二支撑架的结构示意图;
20.图6为本实用新型爬行状态示意图。
21.图中:
22.10、支撑主体;101、爬升齿条;102、滑槽;103、定位块;11、前行机构;111、第一支撑架;112、第二支撑架;113、第一前行电机;114、第二前行电机;115、第一传动件;116、第二传动件;117、第一转轮;118、第二转轮;119、第一滑块;120、第二滑块;121、第一固定杆;122、第二固定杆;20、第一爬升部;201、卡块;202、爬升电机;21、第二爬升部。
具体实施方式
23.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本实用新型。但是本实用新型能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似改进,因此本实用新型不受下面公开的具体实施例的限制。
24.如图1-图6所示,本实用新型提供了一种爬升装置,其特征在于,包括:支撑主体10、第一爬升部20、第二爬升部21;支撑主体10为两侧开口的矩形状,所述第一爬升部20滑动设于所述支撑主体10的一侧,所述第二爬升部21滑动设于所述支撑主体10远离所述第一爬升部20的一侧,所述支撑主体10的两侧上分别设有爬升齿条101,所述第一爬升部20和所
述第二爬升部21内分别设有爬升电机202,所述爬升电机202的输出端分别与对应的所述爬升齿条101传动连接,爬升电机202的输出端连接有齿轮,通过齿轮和爬升齿条101相啮合,电机转动时带动第一爬升部20和第二爬升部21沿爬升齿条101升降,所述支撑主体10内还设有前行机构11,所述爬升齿条101分别与所述前行机构11固定连接,所述前行机构11用于带动所述爬升齿条101滑动,前行机构11运行时,带动两侧的爬升齿条101沿支撑主体10的长度方向移动,同时带动与爬升齿条101连接的第一爬升部20和第二爬升部21沿支撑主体10的长度方向运动,实现第一爬升部20和第二爬升部21的抬起和前进动作,实现爬升的动作。
25.可以理解的,通过在支撑主体10的两侧上分别设置爬升齿条101,实现第一爬升部20和第二爬升部21的上升抬起动作;同时通过在支撑主体10内设置前行机构11,实现第一爬升部20和第二爬升部21的前进动作,通过爬升齿条101和前行机构11之间的相互配合,实现台阶的爬升,结构设计合理,简单,实施方便,生产成本低廉。
26.进一步的,在本实施例中,前行机构11包括:第一支撑架111、第二支撑架112,该第一支撑架111和第二支撑架112上下间隔设置在支撑主体10的内部,在第一支撑架111的一端上设有第一前行电机113,并于另一端上设有第一转轮117,第一前行电机113和第一转轮117之间设有第一传动件115,第一前行电机113和第一转轮117通过第一传动件115传动连接一起,第二支撑架112的一端上设有第二前行电机114,并于另一端上设有第二转轮118,第二前行电机114和第二转轮118之间设有第二传动件116,第二前行电机114和第二转轮118之间通过第二传动件116传动连接,同时在第一传动件115上固定设有第一滑块119,在第二传动件116上固定设有第二滑块120,第一滑块119的一端与一侧的爬升齿条101固定连接,第二滑块120的一端与另一侧的爬升齿条101固定连接,当第一前行电机113运行时,带动与其传动连接的第一传动件115转动,从而带动第一滑块119前后移动,进而带动与之固定连接的爬升齿条101前后运动,带动第一爬升部20前后运动,第二爬升部21与第一爬升部20同理,其中第一前行电机113和第二前行电机114皆为单独控制运行。
27.需要说明的是,第一支撑架111和第二支撑架112皆位于支撑主体10的下部,使重量皆处于支撑主体10的底部上,同时第一前行电机113和第二前行电机114为左右设置,避免支撑主体10的重心处于一侧。
28.进一步的,在本实施例中,为避免第一滑块119和第二滑块120在运动时出现晃动,于第一支撑架111的两侧上分别设有第一固定杆121,于第二支撑架112的两侧上分别设有第二固定杆122,第一滑块119的两端分别与两侧的第一固定杆121滑动连接,第二滑块120的两端分别与两侧的第二固定杆122滑动连接,第一固定杆121和第二固定杆122实现导向的同时还能避免第一滑块119和第二滑块120在运动时出现晃动偏位的情况。
29.进一步的,在本实施例中,每个爬升齿条101的一侧上皆设有滑槽102,第一爬升部20和第二爬升部21的底部上分别设有卡块201,该卡块201与滑槽102相配合,该卡块201插入滑槽102内,并可在滑槽102内滑动,爬升电机202远离输出端的一端与该卡块201固定连接,从而使爬升电机202在运行时能够带动第一爬升部20上升或下降。
30.进一步的,在本实施例中,为防止第一爬升部20或第二爬升部21在上升时,导致爬升齿条101出现倾斜或掉出支撑主体10的现象,于两侧的爬升齿条101的两端上分别设有朝内的定位块103,使爬升齿条101在第一爬升部20或第二爬升部21上升带动而倾斜时在定位
块103与支撑主体10的限制下无法掉出支撑主体10。
31.进一步的,在本实施例中,第一爬升部20和第二爬升部21皆呈矩形,第一爬升部20和第二爬升部21的长度可以等于或大于支撑主体10的长度,在本实施例中,第一爬升部20和第二爬升部21的长度大于支撑主体10的长度,并且在第一爬升部20和第二爬升部21的底面及侧面分别设有清扫片(图中未示出),用于对台阶进行清扫。
32.进一步的,在本实施例中,为避免在爬升时,重心偏移,导致倾斜,在第一爬升部20和第二爬升部21的一端上皆设有配重块(图中未示出),使第一爬升部20和第二爬升部21在爬升时,第一爬升部20和第二爬升部21的重量大于支撑主体10的重量,以此防止重心偏移导致支撑主体10倾倒。
33.需要说明的是,配重块设置于第一爬升部20和第二爬升部21的前行方向的一端上,且位于第一爬升部20和第二爬升部21的底部上使重心偏低,使在爬升时,前端的重量大于后端的重量,以此防止倾倒。
34.进一步的,在本实施例中,为实现爬升装置的平移功能,在第一爬升部20和第二爬升部21的底部上分别设有横向位移机构(图中未示出),两个横向位移机构为同步驱动的方式,使爬升装置在实现爬升,前进的同时还能横向平移运动。
35.需要说明的是,横向位移机构可以采用履带的方式或是滚轮的方式,且横向位移机构因设置成可升降的方式,当平移时,横向位移机构下沉与底面接触,并顶起第一爬升部20和第二爬升部21及支撑主体10,便于平移。
36.进一步的,在本实施例中,为便于控制爬升装置的爬升运动,在第一爬升部20和第二爬升部21前进方向的一端上,分别设有感应器(图中未示出),用于感应台阶,以便于将数据传送到后台,并控制相关运行动作。
37.工作原理,本实用新型在爬升时,一侧的爬升电机202驱动,抬升一侧的第一爬升部20,当第一爬升部20高于要上的台阶时,第一前行电机113运行,驱动第一爬升部20向前移动,使其位于要上的台阶的上方,随后爬升电机202反向运行,使第一爬升部20下降与台阶抵接,随后另一侧的爬升电机202驱动,抬升另一侧的第二爬升部21,并使第二爬升部21高于台阶,此时第二前行电机114运行,驱动第二爬升部21向前移动,使其位于台阶的上方,随后该侧的爬升电机202反向运行,使第二爬升部21下降与台阶抵接,最后,两侧的爬升电机202同步反向运行,第一爬升部20和第二爬升部21在台阶的抵触下,无法运动,使支撑主体10在爬升电机202的带动下上升,且由于第一爬升部20和第二爬升部21上皆设有配重块,第一爬升部20和第二爬升部21的重量大于支撑主体10的重量,因此支撑主体10的在上升时并不会现倾倒的情况,当支撑主体10的底部高于台阶时,第一前行电机113和第二前行电机114同步运行,第一爬升部20和第二爬升部21在台阶垂直面的限制下或者当第一爬升部20和第二爬升部21未抵触台阶垂直面时第一爬升20部和第二爬升部21与地面的摩檫力大于供给支撑主体10前进的推力,使第一爬升部20和第二爬升部21无法前进,使支撑主体10在第一前行电机113和第二前行电机114的驱动下支撑主体10向前运动,从而实现爬升并进行后续的台阶清洁。
38.本实用新型第二方面提供一种机器人,该机器人包括上述实施例中任一项所述的爬升装置。
39.综上所述,本实用新型通过在支撑主体10的两侧上分别设置爬升齿条101,实现第
一爬升部20和第二爬升部21的上升抬起动作;同时通过在支撑主体10内设置前行机构11,实现第一爬升部20和第二爬升部21的前进动作,通过爬升齿条101和前行机构11之间的相互配合,实现台阶的爬升,结构设计合理,简单,实施方便,生产成本低廉。
40.本实用新型并不仅仅限于说明书和实施方式中所描述,因此对于熟悉领域的人员而言可容易地实现另外的优点和修改,故在不背离权利要求及等同范围所限定的一般概念的精神和范围的情况下,本实用新型并不限于特定的细节、代表性的设备和这里示出与描述的图示示例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1