一种力反馈可穿戴柔性外骨骼控制方法及装置与流程
1.本发明涉及外骨骼领域,尤其涉及一种力反馈可穿戴柔性外骨骼控制方法及装置。
背景技术:
2.在现代输电巡检维护工作当中,高压输电线路的巡检工作的重要性尤为突出,为保证输电线路和输电网络稳定、安全运行,必须对其进行周期性的检测和维护。在输电线路的巡检过程中,离不开人的参与,电网巡检依靠人工巡检为主,工作人员每天携带专业设备深入高山峡谷,甚至深山老林,徒步野外行走数十公里到达每一基铁塔下,完成巡检预定工作,碰上恶劣天气,依然要坚持在巡检一线,输电巡检维护是一个需要徒步行走的劳力活,长距离巡线是客观存在。
3.现有技术中存在有外骨骼装置,用于为使用者的步行提供助力,但一般是应用于医疗领域的康复治疗,其整体结构为刚性的,笨重且关节角度受限,活动不便,不适宜于长途步行和攀爬所用。以及,现有的外骨骼装置中,由于使用者的体重、肌肉强度和活动习惯原因,以及存在传动系统的摩擦力损耗,驱动系统的设定输出功率与实际作用到使用者的功率不一致,而在现有技术中并无应对方案。
技术实现要素:
4.鉴于以上技术问题,本发明的目的是提供一种力反馈可穿戴柔性外骨骼控制方法及装置。
5.本公开的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本公开的实践而习得。
6.根据本发明的一方面,公开一种力反馈可穿戴柔性外骨骼控制方法,所述方法包括:
7.获取基于设定值要求的电机转动而实际产生的实际扭矩值,并对所述实际扭矩值和所述设定值进行计算得到反馈值;
8.获取运动关节的在周期内的角加速度、摆动振幅和摆动频率,对所述角加速度、所述摆动频率和所述摆动振幅进行分析并根据分析结果生成所述设定值;
9.根据所述设定值和所述反馈值计算得到修正值,并根据所述修正值驱动所述电机转动,以使得所述实际扭矩值趋向所述设定值。
10.进一步的,所述实际扭矩值由为非接触式的扭矩传感器检测得到。
11.进一步的,所述对所述角加速度、所述摆动频率和所述摆动振幅进行分析并根据分析结果生成所述设定值,具体包括:计算所述角加速度的均方根值以及所述摆动频率和所述摆动振幅的平均值;获取用于控制所述电机转动的基准策略,将所述角加速度的均方根值以及所述摆动频率和所述摆动振幅的平均值代入至所述基准策略中,获得所述设定值。
12.进一步的,所述基准策略包括:所述电机的平均输出扭矩与所述角加速度的均方根的关系;所述电机的转动频率与所述摆动频率的关系;所述电机的转动圈数与所述摆动振幅的关系。
13.进一步的,所述根据所述设定值和所述反馈值计算得到修正值,包括:将所述反馈值与所述设定值叠加,得到所述修正值。
14.根据本发明的另一方面,公开一种力反馈可穿戴柔性外骨骼装置,包括呈c型的碳纤维连杆、设置于所述碳纤维连杆上的动力控制器、分别设置于所述碳纤维连杆两侧的两个驱动器,所述驱动器包括电机和齿轮组,所述齿轮组与一卷轮同轴设置,所述卷轮通过柔性绳索与一个或多个腿部绑带实现传动联接,所述腿部绑带上设置有运动传感模组,所述碳纤维连杆通过设置于其上的腰带固定在人体的腰部,还包括:扭矩传感器,所述扭矩传感器与所述卷轮同轴安装,所述扭矩传感器用于检测基于设定值要求的所述动力控制器控制所述电机转动而实际产生的实际扭矩值,并将所述实际扭矩值输送至所述动力控制器中,所述动力控制将所述实际扭矩值和所述设定值进行计算得到反馈值;运动传感模组,所述运动传感模组上设置于所述腿部绑带中,其至少包括角加速度传感器,所述运动传感模组用于测量自身的在周期内的角加速度、摆动振幅和摆动频率并传输至所述动力控制器,所述动力控制器对所述角加速度、所述摆动频率和所述摆动振幅进行分析并根据分析结果生成所述设定值;以及,所述动力控制器根据所述设定值和所述反馈值计算得到修正值,并根据所述修正值驱动所述电机转动,以使得所述实际扭矩值趋向所述设定值。
15.进一步的,所述扭矩传感器为非接触式的。
16.进一步的,所述动力控制器对所述角加速度、所述摆动频率和所述摆动振幅进行分析并根据分析结果生成所述设定值,具体包括:计算所述角加速度的均方根值以及所述摆动频率和所述摆动振幅的平均值;获取用于控制所述电机转动的基准策略,将所述角加速度的均方根值以及所述摆动频率和所述摆动振幅的平均值代入至所述基准策略中,获得所述设定值。
17.进一步的,所述基准策略包括:所述电机的平均输出扭矩与所述角加速度的均方根的关系;所述电机的转动频率与所述摆动频率的关系;所述电机的转动圈数与所述摆动振幅的关系。
18.进一步的,所述根据所述设定值和所述反馈值计算得到修正值,包括:将所述反馈值与所述设定值叠加,得到所述修正值。
19.本发明的技术方案具有以下有益效果:
20.本发明的控制方法通过实时计算电机带动转动系统的实际输出扭矩与设定值的差距,而计算出修正值并反馈到对电机的修正控制上,使得电机带动转动系统的实际输出扭矩与设定值缩小差距,使得整个助力过程更加贴合使用者的需求。另外,利用运动传感模组对活动部位的周期内的角加速度、摆动振幅和摆动频率进行检测,通过计算得到设定值,从而无需使用者频繁设定运动模式。
21.本发明的装置采用柔性腰带、柔性连接带和驱动器,利用电机带动卷轮旋转而使得腿部绑带上升,进而带动使用者的胯关节运动,提供工作人员步行、攀爬所需的助力,且拥有较轻的质量和较大的运动角度而便于工作人员爬山涉水。
附图说明
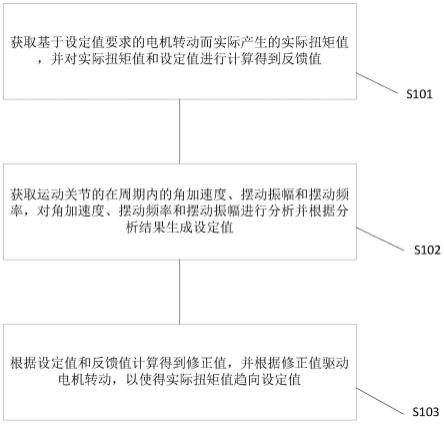
22.图1为本说明书实施例中力反馈可穿戴柔性外骨骼控制方法的流程图;
23.图2为本说明书实施例中力反馈可穿戴柔性外骨骼装置的结构示意图;
24.图3本说明书实施例中驱动器的局部视图。
25.其中,附图标记说明:
26.1、碳纤维连杆;2、动力控制器;3、驱动器;31、驱动电机;32、齿轮组;33、卷轮;4、柔性连接带;5、腿部绑带;6、腰带。
具体实施方式
27.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.如图1所示,本说明书实施例提供一种力反馈可穿戴柔性外骨骼控制方法,方法包括步骤s101-s103:
29.在步骤s101中,获取基于设定值要求的电机转动而实际产生的实际扭矩值,并对实际扭矩值和设定值进行计算得到反馈值。
30.其中,在外骨骼系统了,为了提升电机的输出扭矩,通常可以采用具有多组齿轮组合的传动系统,使得放大电机的输出扭矩,但是,由于有摩擦力的存在和加工精度问题,传动系统的输出扭矩与理论扭矩存在差异,以及由于转动系统与使用者传动关系,由传动系统作用到使用者的受驱动部位时也存在损耗,以及不同体型、不同的安装位置也会存在影响,这些影响无法统一量化,只能在实际使用中进行测量,因而,通过检测实际扭矩值后与理论上的设定值对比,即可获得反馈值。
31.在步骤s102中,获取运动关节的在周期内的角加速度、摆动振幅和摆动频率,对角加速度、摆动频率和摆动振幅进行分析并根据分析结果生成设定值。
32.其中,获得实际扭矩值主要是获得了传动系统的影响因素,而作用到人体上的,则需要从角加速度、摆动频率和摆动振幅中获得。
33.在步骤s103中,根据设定值和反馈值计算得到修正值,并根据修正值驱动电机转动,以使得实际扭矩值趋向设定值。
34.在分析出传动系统和人体所损耗的功率后,便可以针对性提高如电机的扭矩、转速和圈数等参数。
35.在一实施方式中,实际扭矩值由为非接触式的扭矩传感器检测得到。
36.在一实施方式中,对角加速度、摆动频率和摆动振幅进行分析并根据分析结果生成设定值,具体包括:计算角加速度的均方根值以及摆动频率和摆动振幅的平均值;获取用于控制电机转动的基准策略,将角加速度的均方根值以及摆动频率和摆动振幅的平均值代入至基准策略中,获得设定值。
37.作为补充的,基准策略包括:电机的平均输出扭矩与角加速度的均方根的关系;电机的转动频率与摆动频率的关系;电机的转动圈数与摆动振幅的关系。
38.作为补充的,根据设定值和反馈值计算得到修正值,包括:将反馈值与设定值叠加,得到修正值。
39.基于上述实施例中提供控制方法,本发明还提供本发明还提供一种力反馈可穿戴柔性外骨骼装置,如图2所示,包括呈c型的碳纤维连杆1、设置于碳纤维连杆1上的动力控制器2、分别设置于碳纤维连杆1两侧的两个驱动器3,驱动器3包括电机和齿轮组32,齿轮组32与一卷轮33同轴设置,卷轮33通过柔性绳索与一个或多个腿部绑带5实现传动联接,腿部绑带5上设置有运动传感模组,碳纤维连杆1通过设置于其上的腰带6固定在人体的腰部,还包括:扭矩传感器,扭矩传感器与卷轮33同轴安装,扭矩传感器用于检测基于设定值要求的动力控制器2控制电机转动而实际产生的实际扭矩值,并将实际扭矩值输送至动力控制器2中,动力控制将实际扭矩值和设定值进行计算得到反馈值;运动传感模组,运动传感模组上设置于腿部绑带5中,其至少包括角加速度传感器,运动传感模组用于测量自身的在周期内的角加速度、摆动振幅和摆动频率并传输至动力控制器2,动力控制器2对角加速度、摆动频率和摆动振幅进行分析并根据分析结果生成设定值;以及,动力控制器2根据设定值和反馈值计算得到修正值,并根据修正值驱动电机31转动,以使得实际扭矩值趋向设定值。
40.其中,扭矩传感器为非接触式的。
41.在一实施方式中,动力控制器2对角加速度、摆动频率和摆动振幅进行分析并根据分析结果生成设定值,具体包括:计算角加速度的均方根值以及摆动频率和摆动振幅的平均值;获取用于控制电机转动的基准策略,将角加速度的均方根值以及摆动频率和摆动振幅的平均值代入至基准策略中,获得设定值。
42.作为补充的,基准策略包括:电机的平均输出扭矩与角加速度的均方根的关系;电机的转动频率与摆动频率的关系;电机的转动圈数与摆动振幅的关系。
43.在一实施方式中,根据设定值和反馈值计算得到修正值,包括:将反馈值与设定值叠加,得到修正值。
44.由上述实施例得知,本发明的控制方法通过实时计算电机带动转动系统的实际输出扭矩与设定值的差距,而计算出修正值并反馈到对电机的修正控制上,使得电机带动转动系统的实际输出扭矩与设定值缩小差距,使得整个助力过程更加贴合使用者的需求。另外,利用运动传感模组对活动部位的周期内的角加速度、摆动振幅和摆动频率进行检测,通过计算得到设定值,从而无需使用者频繁设定运动模式。
45.本发明的装置采用柔性腰带6、柔性连接带4和驱动器3,利用电机带动卷轮33旋转而使得腿部绑带5上升,进而带动使用者的胯关节运动,提供工作人员步行、攀爬所需的助力,且拥有较轻的质量和较大的运动角度而便于工作人员爬山涉水。
46.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。此外,本领域的技术人员能够理解,尽管在此所述的一些实施例包括其它实施例中所包括的某些特征而不是其它特征,但是不同实施例的特征的组合意味着处于本发明的范围之内并且形成不同的实施例。例如,在上面的权利要求书中,所要求保护的实施例的任意之一都可以以任意的组合方式来使用。公开于该背景技术部分的信息仅仅旨在加深对本发明的总体背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1