一种金属极板上下料精密定位装夹系统及方法与流程
1.本发明涉及电池配件加工技术领域,尤其涉及一种金属极板上下料精密定位装夹系统及方法。
背景技术:
2.化学电源的两个电极由活性物质和支撑及导电用的“集电体”组成,一般为片状多孔体,称为极板。
3.在当前极板平整度不足,翘曲形变量超过2mm的前提下,在对极板进行定位夹紧时,往往不能实现良好的稳定性,所以我们提出一种金属极板上下料精密定位装夹系统及方法,用于解决上述提出的问题。
技术实现要素:
4.基于背景技术存在当前极板平整度不足,翘曲形变量超过2mm的前提下,在对极板进行定位夹紧时,往往不能实现良好的稳定性的技术问题,本发明提出了一种金属极板上下料精密定位装夹系统及方法。
5.本发明提出的一种金属极板上下料精密定位装夹系统,包括安装箱,所述安装箱的顶部固定安装有支撑板,且支撑板的顶部对称滑动连接有u型夹板,u型夹板的数量为两个,u型夹板的底部固定安装有驱动杆,驱动杆的底端延伸至安装箱内并与安装箱的底部内壁滑动连接,驱动杆上连接有位于安装箱内的传动组件,传动组件与支撑板的底部相连接,两个传动组件上连接有同一个横杆,安装箱的底部内壁上安装有动力组件,所述动力组件上连接有驱动推杆,且驱动推杆固定安装在安装箱的底部内壁上,动力组件与横杆相连接,支撑板的底部安装有升降组件,升降组件顶部延伸至支撑板的上方并安装有推板,推板的顶部重量传感器,安装箱内安装有单片机,且单片机与升降组件相连接,升降组件包括电动推杆。
6.借由上述结构,可在将多个电极板叠放在推板上后,通过启动动力组件可带动横杆向上移动,在横杆向上移动时,能够带动两个传动组件进行运转,便可带动两个驱动杆相互靠近,以此能够使得两个u型夹板相互靠近,对多个电极板进行定位夹紧,之后可通过启动升降组件能够带动推板向上移动,以此可将叠装的电极板向上推动,使得多个电极板逐个与两个u型夹板解除夹紧制动,因此能够方便对电极板移出加工,直至重力传感器检测到托板上承载的重力为零,以此可停止升降组件进行工作。
7.加入公式:输入:重力传感器压力y,电动推杆的内径d,重力加速度g,电动推杆阻力系数m,a为电动推杆截面积,f为摩擦因数输出:电动推杆移动距离s
优选的,所述传动组件包括移动环、移动杆、连接罩和转动杆,移动环滑动套设在驱动杆上,移动杆固定安装在移动环的侧面,移动杆的一端延伸至连接罩内并与连接罩的内壁滑动连接,连接罩与横杆的一端固定连接,所述转动杆的底端与移动杆转动连接,所述转动杆的顶端与支撑板的底部转动连接。
8.进一步的,通过移动环与驱动杆进行滑动连接后,可在移动杆发生横向运动时,能够带动驱动杆进行横向移动,以此可使得u型夹板进行横向移动。
9.优选的,所述移动杆上套设有位于连接罩内的拉伸弹簧,拉伸弹簧的两端分别与移动杆的一端和连接罩的内壁固定连接。
10.进一步的,利用拉伸弹簧可在横杆向上移动时,可辅助拉动连接罩反向移动,使得u型夹板反向复位。
11.优选的,所述动力组件包括伸缩构件、拉绳和传动环,传动环滑动套设在横杆上,伸缩构件分别与安装箱的底部内壁、拉绳的一端、驱动推杆的输出轴和传动环的底部相连接。
12.进一步的,通过启动驱动推杆可带动伸缩构件进行运动,此时在拉绳的拉力作用下,能够使得伸缩组件向下收缩,便可方便对横杆提供向下的拉力。
13.优选的,所述伸缩构件包括移动罩、传动杆、连接板和复位件,移动罩滑动连接在安装箱的底部内壁上,驱动推杆的输出轴与移动罩的右侧底部固定连接,传动杆固定安装在传动环的底部,传动杆的底端延伸至移动罩内并与连接板固定连接,连接板与移动罩的内壁滑动连接,移动罩的左侧内壁上开设有滑孔,且连接板的左侧贯穿滑孔并延伸至安装箱内,连接板的左侧与拉绳的左端固定连接,传动杆的左侧开设有安装槽,复位件分别与移动罩的内壁和安装槽的内壁相连接。
14.进一步的,在移动罩随着驱动推杆进行移动时,可带动连接板横向移动,此时在拉绳的拉力的作用下,可带动传动杆向下移动,以此能使得横杆向下移动。
15.优选的,所述复位件包括支撑轴、齿轮、齿条和扭力弹簧,支撑轴转动连接在移动罩的内壁上,齿轮固定套设在支撑轴上,且齿条固定安装在安装槽的右侧内壁上,齿轮的右侧延伸至安装槽内并与齿条相啮合,扭力弹簧套设在支撑轴上,且扭力弹簧位于齿轮的后侧,扭力弹簧的前端和后端分别与齿轮的后侧和移动罩的后侧内壁固定连接。
16.进一步的,利用扭力弹簧的弹力能够在传动杆向上复位时,可提供必要的辅助力,使得传动杆能够稳定的向上移动。
17.优选的,所述升降组件还包括固定箱、油箱、活塞板、输油管、支撑箱和支撑构件,固定箱固定安装在支撑板的底部,电动推杆固定安装在固定箱的右侧,油箱滑动安装在固定箱内,电动推杆的输出轴延伸至油箱内并与活塞板固定连接,活塞板与油箱的内壁密封滑动连接,油箱内设有液压油,输油管固定安装在油箱的左侧底部内壁上,支撑箱固定安装在固定箱内,输油管的左端延伸至支撑箱内并与支撑箱的右侧底部内壁固定连接,支撑构件安装在支撑箱内,支撑构件的顶端延伸至支撑板的上方并与推板的底部相连接,电动推杆的输出轴与单片机电性连接。
18.进一步的,通过启动电动推杆可将液压油推送至支撑箱内,以此能够使得支撑构件进行运转,便可使得推板向上移动。
19.优选的,所述支撑构件包括支撑环、托环、移动箱、定位环、顶板和顶杆,支撑环固定安装在支撑箱内,托环密封滑动连接在支撑箱内,移动箱固定安装在托环的顶部,移动箱的底部内壁上开设有流动孔,定位环固定安装在移动箱内,顶杆固定安装在推板的底部,顶杆的底端延伸至移动箱内并与顶板固定连接,顶板与移动箱的内壁密封滑动连接。
20.进一步的,利用顶杆和支撑箱构成的伸缩结构,能够扩大推板向上移动的范围,所以能够将放置在最下方的电极板移出两个u型夹板的夹持范围,所以可方便将电极板移出加工;所述电动推杆根据公式移动距离s,其中,重力传感器压力y,电动推杆的内径d,重力加速度g,电动推杆阻力系数m,a为电动推杆截面积,f为摩擦因数。
21.本发明提出一种金属极板上下料精密定位装夹系统的使用方法,包括以下步骤:s1、首先将多个电极板整齐叠放在推板上;s2、启动驱动推杆,可使得两个u型夹板相互靠近,以此能够对多个叠放的电极板进行定位夹紧;s3、通过启动电动推杆可带动推板向上移动,可将多个电极板依次推出两个u型夹板的夹持区间,便可对电极板进行加工。
22.本发明的有益效果是:1、本发明中,将多个电极板叠放在推板上后,此时可启动驱动推杆拉动移动罩向右侧移动,在移动罩进行移动时,可在拉绳的拉动下,使得连接板向下移动,此时通过传动杆可带动传动环向下移动,在传动环向下移动时,可在与横杆的滑动连接下,能够带动两个连接罩向下移动,便可使得两个移动杆同步向下移动,在移动杆向下移动时,可带动转动杆向下转动,此时在转动杆的拉力作用下,可使得移动杆向连接罩内进行移动,以此可在移动环和驱动杆的滑动连接下可使得u型夹板进行横向移动,此时两个u型夹板会相互靠近,直至对电极板进行定位夹紧;2、本发明中,在启动电动推杆时,可带动活塞板向左侧移动,此时可将油箱内的液压油经过输油管输送至支撑箱内,以此可带动移动箱向上移动,此时在顶杆的推动下,可使得推板向上抬升,将电极板向上移动,以此可将多个电极板逐个移出两个u型夹板的夹持范围,可方便对电极板进行加工,并且在移动箱移动至最上方后,此时液压油可进入移动箱内,便可推动顶杆沿着移动箱继续向上移动,以此能够增大推板的升高范围,方便将夹持的电极板全部移出,进行加工;本发明结构合理,可在启动驱动推杆,能够使得两个u型夹板相互靠近,对电极板进行定位夹紧,并且在启动电动推杆后,可使得推板向上移动,依次可将叠放的多个电极板移出,便可方便对电极板加工,所以能够在对电极板进行夹紧定位时,能够保证电极板处于稳定状态,因此具有良好的使用稳定性。
附图说明
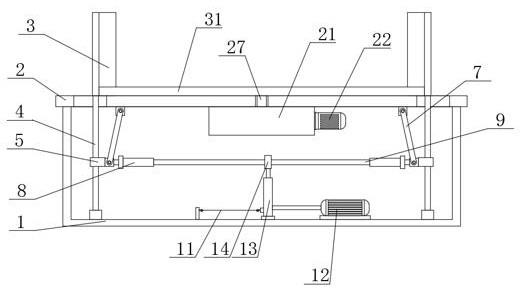
23.图1为本发明提出的一种金属极板上下料精密定位装夹系统的结构主视图;图2为本发明提出的一种金属极板上下料精密定位装夹系统的横杆和两个连接罩连接结构主视图;图3为本发明提出的一种金属极板上下料精密定位装夹系统的拉绳、连接板和传动杆连接结构主视图;图4为本发明提出的一种金属极板上下料精密定位装夹系统的扭力弹簧、支撑轴、齿轮和齿条连接结构三维图;图5为本发明提出的一种金属极板上下料精密定位装夹系统的固定箱内部结构主视图;图6为本发明提出的一种金属极板上下料精密定位装夹系统的附图5中a部分结构示意图;图7为本发明提出的一种金属极板上下料精密定位装夹系统的结构三维图;图8为本发明提出的一种金属极板上下料精密定位装夹系统的重力传感器、单片机和电动推杆连接结构框图。
24.图中:1、安装箱;2、支撑板;3、u型夹板;4、驱动杆;5、移动环;6、移动杆;7、转动杆;8、连接罩;9、横杆;10、拉伸弹簧;11、拉绳;12、驱动推杆;13、移动罩;14、传动环;15、传动杆;16、连接板;17、支撑轴;18、齿轮;19、齿条;20、扭力弹簧;21、固定箱;22、电动推杆;23、油箱;24、活塞板;25、输油管;26、支撑箱;27、移动箱;28、顶杆;29、顶板;30、定位环;31、推板;32、托环;33、支撑环。
具体实施方式
25.下面结合具体实施例对本发明作进一步解说。
26.参考图1-8,本实施例中提出了一种金属极板上下料精密定位装夹系统,包括安装箱1,安装箱1的顶部固定安装有支撑板2,且支撑板2的顶部对称滑动连接有u型夹板3,u型夹板3的数量为两个,u型夹板3的底部固定安装有驱动杆4,驱动杆4的底端延伸至安装箱1内并与安装箱1的底部内壁滑动连接,驱动杆4上连接有位于安装箱1内的传动组件,传动组件与支撑板2的底部相连接,两个传动组件上连接有同一个横杆9,安装箱1的底部内壁上安装有动力组件,动力组件上连接有驱动推杆12,且驱动推杆12固定安装在安装箱1的底部内壁上,动力组件与横杆9相连接,支撑板2的底部安装有升降组件,升降组件顶部延伸至支撑板2的上方并安装有推板31,推板31的顶部重量传感器,安装箱1内安装有单片机,且单片机与升降组件相连接,升降组件包括电动推杆22。
27.借由上述结构,可在将多个电极板叠放在推板31上后,通过启动动力组件可带动横杆9向上移动,在横杆9向上移动时,能够带动两个传动组件进行运转,便可带动两个驱动杆4相互靠近,以此能够使得两个u型夹板3相互靠近,对多个电极板进行定位夹紧,之后可通过启动升降组件能够带动推板31向上移动,以此可将叠装的电极板向上推动,使得多个电极板逐个与两个u型夹板3解除夹紧制动,因此能够方便对电极板移出加工,直至重力传感器检测到托板31上承载的重力为零,以此可停止升降组件进行工作。
28.本实施例中,传动组件包括移动环5、移动杆6、连接罩8和转动杆7,移动环5滑动套
设在驱动杆4上,移动杆6固定安装在移动环5的侧面,移动杆6的一端延伸至连接罩8内并与连接罩8的内壁滑动连接,连接罩8与横杆9的一端固定连接,转动杆7的底端与移动杆6转动连接,转动杆7的顶端与支撑板2的底部转动连接。
29.通过移动环5与驱动杆4进行滑动连接后,可在移动杆6发生横向运动时,能够带动驱动杆4进行横向移动,以此可使得u型夹板3进行横向移动。
30.本实施例中,移动杆6上套设有位于连接罩8内的拉伸弹簧10,拉伸弹簧10的两端分别与移动杆6的一端和连接罩8的内壁固定连接。
31.利用拉伸弹簧10可在横杆9向上移动时,可辅助拉动连接罩8反向移动,使得u型夹板3反向复位。
32.本实施例中,动力组件包括伸缩构件、拉绳11和传动环14,传动环14滑动套设在横杆9上,伸缩构件分别与安装箱1的底部内壁、拉绳11的一端、驱动推杆12的输出轴和传动环14的底部相连接。
33.通过启动驱动推杆12可带动伸缩构件进行运动,此时在拉绳11的拉力作用下,能够使得伸缩组件向下收缩,便可方便对横杆9提供向下的拉力。
34.本实施例中,伸缩构件包括移动罩13、传动杆15、连接板16和复位件,移动罩13滑动连接在安装箱1的底部内壁上,驱动推杆12的输出轴与移动罩13的右侧底部固定连接,传动杆15固定安装在传动环14的底部,传动杆15的底端延伸至移动罩13内并与连接板16固定连接,连接板16与移动罩13的内壁滑动连接,移动罩13的左侧内壁上开设有滑孔,且连接板16的左侧贯穿滑孔并延伸至安装箱1内,连接板16的左侧与拉绳11的左端固定连接,传动杆15的左侧开设有安装槽,复位件分别与移动罩13的内壁和安装槽的内壁相连接。
35.在移动罩13随着驱动推杆12进行移动时,可带动连接板16横向移动,此时在拉绳11的拉力的作用下,可带动传动杆15向下移动,以此能使得横杆9向下移动。
36.本实施例中,复位件包括支撑轴17、齿轮18、齿条19和扭力弹簧20,支撑轴17转动连接在移动罩13的内壁上,齿轮18固定套设在支撑轴17上,且齿条19固定安装在安装槽的右侧内壁上,齿轮18的右侧延伸至安装槽内并与齿条19相啮合,扭力弹簧20套设在支撑轴17上,且扭力弹簧20位于齿轮18的后侧,扭力弹簧20的前端和后端分别与齿轮18的后侧和移动罩13的后侧内壁固定连接。
37.利用扭力弹簧20的弹力能够在传动杆15向上复位时,可提供必要的辅助力,使得传动杆15能够稳定的向上移动。
38.本实施例中,升降组件还包括固定箱21、油箱23、活塞板24、输油管25、支撑箱26和支撑构件,固定箱21固定安装在支撑板2的底部,电动推杆22固定安装在固定箱21的右侧,油箱23滑动安装在固定箱21内,电动推杆22的输出轴延伸至油箱23内并与活塞板24固定连接,活塞板24与油箱23的内壁密封滑动连接,油箱23内设有液压油,输油管25固定安装在油箱23的左侧底部内壁上,支撑箱26固定安装在固定箱21内,输油管25的左端延伸至支撑箱26内并与支撑箱26的右侧底部内壁固定连接,支撑构件安装在支撑箱26内,支撑构件的顶端延伸至支撑板2的上方并与推板31的底部相连接,电动推杆22的输出轴与单片机电性连接。
39.通过启动电动推杆22可将液压油推送至支撑箱26内,以此能够使得支撑构件进行运转,便可使得推板31向上移动。
40.本实施例中,支撑构件包括支撑环33、托环32、移动箱27、定位环30、顶板29和顶杆28,支撑环33固定安装在支撑箱26内,托环32密封滑动连接在支撑箱26内,移动箱27固定安装在托环32的顶部,移动箱27的底部内壁上开设有流动孔,定位环30固定安装在移动箱27内,顶杆28固定安装在推板31的底部,顶杆28的底端延伸至移动箱27内并与顶板29固定连接,顶板29与移动箱27的内壁密封滑动连接。
41.利用顶杆28和支撑箱26构成的伸缩结构,能够扩大推板31向上移动的范围,所以能够将放置在最下方的电极板移出两个u型夹板3的夹持范围,所以可方便将电极板移出加工。
42.本实施例中,将多个电极板叠放在推板31上后,重力传感器可对多个电机板的重力进行检测,之后可启动驱动推杆12拉动移动罩13向右侧移动,在移动罩13进行移动时,可在拉绳11的拉动下,使得连接板16向下移动,此时通过传动杆15可带动传动环14向下移动,在传动环14向下移动时,可在与横杆9的滑动连接下,能够带动两个连接罩8向下移动,便可使得两个移动杆6同步向下移动,在移动杆6向下移动时,可带动转动杆7向下转动,此时在转动杆7的拉力作用下,可使得移动杆6向连接罩8内进行移动,以此可在移动环5和驱动杆4的滑动连接下可使得u型夹板3进行横向移动,此时两个u型夹板3会相互靠近,直至对电极板进行定位夹紧,在启动电动推杆22时,可带动活塞板24向左侧移动,此时可将油箱23内的液压油经过输油管25输送至支撑箱26内,以此可带动移动箱27向上移动,此时在顶杆28的推动下,可使得推板31向上抬升,将电极板向上移动,以此可将多个电极板逐个移出两个u型夹板3的夹持范围,可方便对电极板进行加工,直至重力传感器检测到推板31上承载的重力为零,便能够将电极板全部推出,并且在移动箱27移动至最上方后,此时液压油可进入移动箱27内,便可推动顶杆28沿着移动箱27继续向上移动,以此能够增大推板31的升高范围,方便将夹持的电极板全部移出,进行加工,所以能够在对电极板进行夹紧定位时,能够保证电极板处于稳定状态,因此具有良好的使用稳定性。
43.本发明提出一种金属极板上下料精密定位装夹系统的使用方法,包括以下步骤:s1、首先将多个电极板整齐叠放在推板31上;s2、启动驱动推杆12,可使得两个u型夹板3相互靠近,以此能够对多个叠放的电极板进行定位夹紧;s3、通过启动电动推杆22可带动推板31向上移动,可将多个电极板依次推出两个u型夹板3的夹持区间,便可对电极板进行加工;所述电动推杆根据公式移动距离s,其中,重力传感器压力y,电动推杆的内径d,重力加速度g,电动推杆阻力系数m,a为电动推杆截面积,f为摩擦因数。
44.本实施例根据重力传感器自动计算电动推杆移动距离,避免需要人工多次尝试移动电动推杆距离,节约人力且对电动推杆损耗降低。
45.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其
发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1