一种智能康养机器人的制作方法
1.本实用新型涉及机器人技术领域,尤其涉及一种智能康养机器人。
背景技术:
2.养老一般是指老年人居家休养,随着我国逐步进入老龄化社会,老年人数量越来越多,而子女由于工作的关系,难以进行长期陪伴照顾,老年人独自在家的情况越来越普遍,老年人独自在家容易导致诸多问题,一方面,当老年人跌倒之后,难以及时呼救,另一方面,老年人独自在家,精神上较为空虚,一般会选择购买相应的康养机器人来陪伴和为老人提供一定的服务;
3.现涉及一种智能康养机器人,现有的智能康养机器人大多只有语音协助功能,在使用时一般会进行语音协助和自动行走功能,功能单一,在不跟随老人或者老人处于实业盲区时,无法自动对老人进行观察,无法及时观察到老人的状态,而有些可自动转向的机器人则会使得面部始终面对老人,会增加老人的紧张感,实用性较低。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种智能康养机器人。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种智能康养机器人,包括机器人本体,所述机器人本体的顶端安装有头部,所述头部的顶部开设有凹槽,所述凹槽的内部安装有驱动机构,所述凹槽的内部安装有旋转监控机构,所述机器人本体的底部设有移动底座,所述机器人本体的底部对称开设有两个安装槽,两个所述安装槽的内部均安装有与移动底座相连接的升降机构,所述机器人本体的外表面前侧依次开设有第一收纳槽和第二收纳槽,所述第一收纳槽的内部安装有支撑机构,所述第二收纳槽的内部安装有收纳机构。
6.进一步的,所述驱动机构包括固定安装在凹槽的内部的第一电机,所述第一电机的输出轴固定连接有齿轮,所述齿轮的外表面啮合连接有齿圈。
7.进一步的,所述旋转监控机构包括支撑环,所述支撑环与凹槽的内壁转动连接,所述齿圈与支撑环的内壁固定连接,所述支撑环的顶端固定连接有顶盖,所述顶盖的内壁安装有摄像头,所述顶盖的外表面开设有与摄像头相配合的通孔。
8.进一步的,所述升降机构包括固定安装在安装槽内顶部的第二电机,所述第二电机的输出轴固定连接有第一螺杆,所述第一螺杆的外表面螺纹连接有与安装槽内壁滑动连接的支撑杆,且所述支撑杆的底端与移动底座的顶部固定连接。
9.进一步的,所述支撑机构包括对称固定安装在第一收纳槽内壁的两个第三电机,所述第三电机的输出轴固定连接有第二螺杆,两个所述第二螺杆的外表面螺纹连接有同一个放置板,且所述放置板与第一收纳槽内壁滑动连接。
10.进一步的,所述收纳机构包括对称安装在第二收纳槽内壁的两个电动推杆,所述
两个所述电动推杆的活动端固定连接有同一个收纳盒,且所述收纳盒与第二收纳槽的内壁滑动连接。
11.进一步的,所述机器人本体和头部的内部分别开设有第一安装腔和第二安装腔,所述第一安装腔和第二安装腔的内部分别安装有第一控制器和第二控制器,所述驱动机构和旋转监控机构均通过导线与第二控制器电性连接,所述升降机构、移动底座、支撑机构和收纳机构均通过导线与第一控制器电性连接,所述机器人本体的外表面嵌入安装有扬声器。
12.本实用新型的有益效果:
13.1、本实用新型在使用时,该智能康养机器人,通过设置的第二控制器、驱动机构和旋转监控机构,启动机构中的第一电机转动可以带动顶盖和摄像头转动,进而便于追踪人体,不用使得机器人始终面对使用者,从而可以减少使用者的紧张感。
14.2、本实用新型在使用时,该智能康养机器人,通过设置的第一控制器、控制升降机构、移动底座、支撑机构和收纳机构,可以实现机器人本体的升降、放置板与收纳盒的伸缩,以及机器人的自动移动,从而实现智能服务,具有一定的实用性。
附图说明
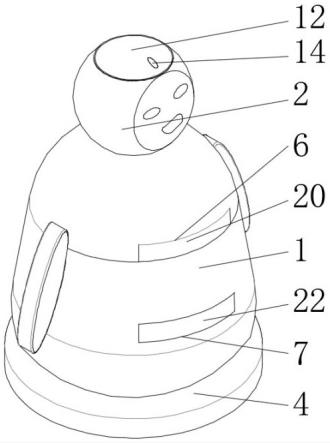
15.图1为本实用新型的立体图;
16.图2为本实用新型的整体结构示意图;
17.图3为本实用新型的头部的内部结构示意图。
18.图例说明:
19.1、机器人本体;2、头部;3、凹槽;4、移动底座;5、安装槽;6、第一收纳槽;7、第二收纳槽;8、第一电机;9、齿轮;10、齿圈;11、支撑环;12、顶盖;13、摄像头;14、通孔;15、第二电机;16、第一螺杆;17、支撑杆;18、第三电机;19、第二螺杆;20、放置板;21、电动推杆;22、收纳盒;23、第一安装腔;24、第二安装腔;25、第一控制器;26、第二控制器;27、扬声器。
具体实施方式
20.图1至图3所示,涉及一种智能康养机器人,包括机器人本体1,机器人本体1的顶端安装有头部2,头部2的顶部开设有凹槽3,凹槽3的内部安装有驱动机构,凹槽3的内部安装有旋转监控机构,机器人本体1的底部设有移动底座4,机器人本体1的底部对称开设有两个安装槽5,两个安装槽5的内部均安装有与移动底座4相连接的升降机构,机器人本体1的外表面前侧依次开设有第一收纳槽6和第二收纳槽7,第一收纳槽6的内部安装有支撑机构,第二收纳槽7的内部安装有收纳机构。
21.驱动机构包括固定安装在凹槽3的内部的第一电机8,第一电机8的输出轴固定连接有齿轮9,齿轮9的外表面啮合连接有齿圈10,第一电机8转动带动齿轮9转动,从而带动齿圈10转动。
22.旋转监控机构包括支撑环11,支撑环11与凹槽3的内壁转动连接,齿圈10与支撑环11的内壁固定连接,支撑环11的顶端固定连接有顶盖12,顶盖12的内壁安装有摄像头13,顶盖12的外表面开设有与摄像头13相配合的通孔14,齿圈10转动带动支撑环11转动,从而带动顶盖12和摄像头13转动,进而便于追踪人体。
23.升降机构包括固定安装在安装槽5内顶部的第二电机15,第二电机15的输出轴固定连接有第一螺杆16,第一螺杆16的外表面螺纹连接有与安装槽5内壁滑动连接的支撑杆17,且支撑杆17的底端与移动底座4的顶部固定连接,第二电机15转动带动第一螺杆16转动,从而通过螺纹带动支撑杆17移动,从而实现机器人本体1的升降。
24.支撑机构包括对称固定安装在第一收纳槽6内壁的两个第三电机18,第三电机18的输出轴固定连接有第二螺杆19,两个第二螺杆19的外表面螺纹连接有同一个放置板20,且放置板20与第一收纳槽6内壁滑动连接,第三电机18转动带动第二螺杆19转动,从而通过螺纹带动放置板20移出第一收纳槽6,从而便有放置物品。
25.收纳机构包括对称安装在第二收纳槽7内壁的两个电动推杆21,两个电动推杆21的活动端固定连接有同一个收纳盒22,且收纳盒22与第二收纳槽7的内壁滑动连接,电动推杆21可以自动带动收纳盒22推出和收纳,从而便于放置和收纳物品。
26.机器人本体1和头部2的内部分别开设有第一安装腔23和第二安装腔24,第一安装腔23和第二安装腔24的内部分别安装有第一控制器25和第二控制器26,驱动机构和旋转监控机构均通过导线与第二控制器26电性连接,升降机构、移动底座4、支撑机构和收纳机构均通过导线与第一控制器25电性连接,机器人本体1的外表面嵌入安装有扬声器27,便于实现智能自动控制。
27.在使用智能康养机器人时,当机器人不移动时,此时第二控制器26控制第一电机8转动,第一电机8转动带动齿轮9转动,从而带动齿圈10转动,齿圈10转动带动支撑环11转动,从而带动顶盖12和摄像头13转动,进而便于追踪人体,不用使得机器人始终面对使用者,从而可以减少使用者的紧张感,第一控制器25通过到导线可以分别控制升降机构、移动底座4、支撑机构和收纳机构启动,第二电机15转动带动第一螺杆16转动,从而通过螺纹带动支撑杆17移动,从而实现机器人本体1的升降,第三电机18转动带动第二螺杆19转动,从而通过螺纹带动放置板20移出第一收纳槽6,从而便有放置物品,电动推杆21可以自动带动收纳盒22推出和收纳,从而便于放置和收纳物品,移动底座4启动可以使得机器人可以自动移动,从而实现智能服务,具有一定的实用性。
28.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1