一种机械控制手臂
1.本实用新型涉及机械臂领域,特别涉及一种机械控制手臂。
背景技术:
2.机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统,因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用,与刚性机械臂相比较,柔性机械臂具有结构轻、载重/自重比高等特性,因而具有较低的能耗、较大的操作空间和很高的效率,其响应快速而准确,从而实现精确控制机械臂工作,具有较好的工作效率等优点;
3.根据中国专利申请号为cn201621174783.6,专利名称为《一种新型机械臂》中公开的机械臂存在一定的弊端,首先机械臂在转动停止时,基座与机械臂容易发生松动或者相对转动,使得工作时机械臂不能立刻停止运转,缺少将机械臂进行锁紧的机构,还有在机械臂需要进行急停时,机械臂和基座之间容易发生一些冲击,从而使得基座和机械臂之间的部件发生损坏。
技术实现要素:
4.本实用新型的主要目的在于提供一种机械控制手臂,可以有效解决背景技术中提出的技术问题。
5.为实现上述目的,本实用新型采取的技术方案为:
6.一种机械控制手臂,包括机械臂主体和固定底座,所述机械臂主体的底端设置有底板,所述底板的中间设置有驱动电机,且驱动电机贯穿底板与固定底座相连接,所述底板和固定底座相交处设置有锁合结构和缓冲结构;
7.所述锁合结构包括第一固定环,所述第一固定环焊接于固定底座的圆柱面,所述第一固定环的顶端设置有第二固定环,且第二固定环通过螺栓与第一固定环相固定,所述第一固定环和第二固定环的内壁开设有放置腔,所述放置腔的内壁设置有一圈组合板,所述第一固定环的底端边缘处设置有电动推杆,所述底板的圆柱面底端设置有一圈导向条,所述底板上且位于导向条处设置有固定齿轮,所述固定齿轮与电动推杆的端部相连接。
8.作为本实用新型优选的一种技术方案,所述组合板的内壁开设有与固定齿轮相配合的齿槽,所述固定齿轮与组合板相啮合,所述固定齿轮的内壁与导向条滑动连接。
9.作为本实用新型优选的一种技术方案,所述组合板的放置腔的深度大于等于组合板、固定齿轮和导向条的总宽度。
10.作为本实用新型优选的一种技术方案,所述缓冲结构包括弧形条,所述弧形条设置于组合板的外壁,所述第一固定环的内壁开设有一圈第一配合槽,所述第二固定环的内壁开设有一圈第二配合槽,所述弧形条位于第一配合槽与第二配合槽的内部,所述组合板的内部之间设置有连接环,所述连接环上且位于相邻的组合板之间设置有伸缩弹簧。
11.作为本实用新型优选的一种技术方案,所述连接环与组合板滑动连接,且弧形条与第一配合槽和第二配合槽均滑动连接。
12.作为本实用新型优选的一种技术方案,所述驱动电机的外壳与底板相固定,且固定底座与底板的底端转动连接。
13.与现有技术相比,本实用新型具有如下有益效果:本实用新型中设置有锁合结构,在机械臂主体与固定底座进行转动后,可以通过电动推杆带动固定齿轮沿着导向条滑动,进而将固定齿轮与组合板之间进行锁合,避免驱动电机带动机械臂主体转动,可以将底板和固定底座进行锁合后防止发生相对转动;
14.设置有缓冲结构,在机械臂主体和固定底座转动后需要进行急停时,固定齿轮与组合板接触会使得固定齿轮沿着连接环滑动,且第一配合槽和第二配合槽大于弧形条的长度可以提供缓冲行程,伸缩弹簧减小固定齿轮和组合板之间的冲击,防止固定齿轮和组合板损坏。
附图说明
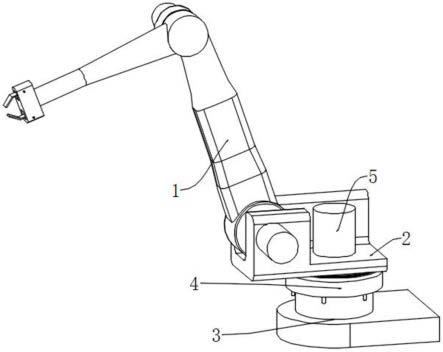
15.图1为本实用新型一种机械控制手臂的整体结构示意图;
16.图2为本实用新型一种机械控制手臂的底板和固定底座示意图;
17.图3为本实用新型一种机械控制手臂的锁合结构拆分示意图;
18.图4为本实用新型一种机械控制手臂的缓冲结构拆分示意图。
19.图中:1、机械臂主体;2、底板;3、固定底座;4、锁合结构;5、驱动电机;6、缓冲结构;401、第一固定环;402、第二固定环;403、固定齿轮;404、组合板;405、电动推杆;406、导向条;601、第一配合槽;602、第二配合槽;603、弧形条;604、连接环;605、伸缩弹簧。
具体实施方式
20.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
21.如图1-图4所示,一种机械控制手臂,包括机械臂主体1和固定底座3,机械臂主体1的底端设置有底板2,底板2的中间设置有驱动电机5,且驱动电机5贯穿底板2与固定底座3相连接,底板2和固定底座3相交处设置有锁合结构4和缓冲结构6;
22.锁合结构4包括第一固定环401,第一固定环401焊接于固定底座3的圆柱面,第一固定环401的顶端设置有第二固定环402,且第二固定环402通过螺栓与第一固定环401相固定,第一固定环401和第二固定环402的内壁开设有放置腔,放置腔的内壁设置有一圈组合板404,第一固定环401的底端边缘处设置有电动推杆405,底板2的圆柱面底端设置有一圈导向条406,底板2上且位于导向条406处设置有固定齿轮403,固定齿轮403与电动推杆405的端部相连接。
23.本实施例中,组合板404的内壁开设有与固定齿轮403相配合的齿槽,固定齿轮403与组合板404相啮合,固定齿轮403的内壁与导向条406滑动连接;组合板404的放置腔的深度大于等于组合板404、固定齿轮403和导向条406的总宽度,在机械臂主体1与固定底座3进行转动后,可以通过电动推杆405带动固定齿轮403沿着导向条406滑动,进而将固定齿轮403与组合板404之间进行锁合,避免驱动电机5带动机械臂主体1转动,可以将底板2和固定底座3进行锁合后防止发生相对转动。
24.本实施例中,缓冲结构6包括弧形条603,弧形条603设置于组合板404的外壁,第一
固定环401的内壁开设有一圈第一配合槽601,第二固定环402的内壁开设有一圈第二配合槽602,弧形条603位于第一配合槽601与第二配合槽602的内部,组合板404的内部之间设置有连接环604,连接环604上且位于相邻的组合板404之间设置有伸缩弹簧605;连接环604与组合板404滑动连接,且弧形条603与第一配合槽601和第二配合槽602均滑动连接,在机械臂主体1和固定底座3转动后需要进行急停时,固定齿轮403与组合板404接触会使得固定齿轮403沿着连接环604滑动,且第一配合槽601和第二配合槽602大于弧形条603的长度可以提供缓冲行程,伸缩弹簧605减小固定齿轮403和组合板404之间的冲击,防止固定齿轮403和组合板404损坏。
25.此外,驱动电机5的外壳与底板2相固定,且固定底座3与底板2的底端转动连接。
26.需要说明的是,机械臂在工作时会绕着不同转轴进行转动,其中需要底板2与固定底座3发生相对转动,启动驱动电机5使得底板2与固定底座3发生转动,使得机械臂端部的机械手进行移动位置,在机械臂停止转动时,为了防止底板2与固定底座3发生相对转动,此时可以通过锁合结构4来防止底板2和固定底座3发生相对转动,具体为,在底板2和固定底座3停止转动时,通过电动推杆405带动固定齿轮403沿着导向条406向下移动,直至将固定齿轮403移动到与组合板404处,此时固定齿轮403和组合板404相啮合,可以将导向条406上的固定齿轮403与组合板404相卡合,避免底板2和固定底座3发生相对转动,且在转动时,将固定齿轮403推送至底板2的光滑区域即可正常转动,在机械臂主体1转动后需要进行急停时,此时会将固定齿轮403卡在组合板404之间,此时可以通过固定齿轮403推动组合板404沿着第一配合槽601和第二配合槽602转动,且组合板404沿着连接环604转动,且通过组合板404之间的伸缩弹簧605减小固定齿轮403对组合板404的冲击,且第一配合槽601和第二配合槽602大于弧形条603的长度可以提供缓冲行程,在急停时减小对锁合结构4造成损坏。
27.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1