巡逻机器人的制作方法
1.本实用新型涉及停车管理技术领域,特别涉及一种巡逻机器人。
背景技术:
2.对于大型商业中心、写字楼的地下停车场或大型露天停车场,场地内虽然有监控,但还是需要保安对场地内定时进行巡逻,尤其是对于一些较大的多层停车场,人工巡逻人力成本高。因此,实现一种巡逻机器人是目前亟待解决的技术问题。
技术实现要素:
3.本实用新型提出一种巡逻机器人,解决现有技术中在大型停车场人工巡逻人力成本高的技术问题。
4.本实用新型的一种巡逻机器人,包括:底座,所述底座下方设有行走部,所述底座上方设有垂直于底座的第一隔板,所述第一隔板将所述底座划分为围绕底座中心的至少三个外围区域,每个所述外围区域内分别设有第一摄像头,所述第一摄像头不超出第一隔板顶部,所述底座内设有电池和主控板,所述第一摄像头连接所述主控板,所述主控板设有无线通信模块,所述电池为主控板、行走部和第一摄像头供电。
5.其中,所述第一隔板靠近底座中心一端到靠近底座边缘一端呈高度递减的趋势。
6.其中,每个所述外围区域顶部均设有第一透明罩,所述第一隔板支撑所述第一透明罩。
7.其中,还包括:第二隔板,所述第二隔板将所述底座中心围成中心区域,所述第一隔板位于中心区域外侧,将底座划分成围绕所述中心区域的至少三个所述外围区域,所述中心区域内设有镜头朝上的第二摄像头,所述第二摄像头不超出第二隔板顶部,所述第二摄像头连接所述主控板。
8.其中,所述第一隔板靠近所述中心区域一端到靠近底座边缘一端呈高度递减的趋势。
9.其中,每个所述外围区域顶部设有第一透明罩,所述中心区域顶部设有第二透明罩,所述第一隔板支撑所述第一透明罩,所述第二隔板支撑所述第二透明罩。
10.其中,所述底座为正方形或圆形底座,所述第一隔板将所述底座平均划分为四个外围区域。
11.其中,所述底座边缘设有雷达,所述雷达连接所述主控板。
12.其中,所述底座内还设有扬声器,所述扬声器连接所述主控板。
13.其中,所述底座边缘设有防撞条。
14.本实用新型的巡逻机器人,所述底座上方设有垂直于底座的第一隔板,所述第一隔板将所述底座划分为围绕底座中心的至少三个外围区域,每个所述外围区域内分别设有第一摄像头,至少三个摄像头便于在巡逻时360度拍摄周围环境图像,将拍摄的图像上传至监控中心,实现了大型停车场的无人巡逻,降低了人力成本。而且整个巡逻机器人呈一个扁
平的板状结构,能够在车下穿行,能躲避道路上的车辆。
附图说明
15.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
16.图1为本实用新型的一种巡逻机器人结构示意图;
17.图2为图1的巡逻机器人的侧视图;
18.图3为图1的巡逻机器人的俯视图;
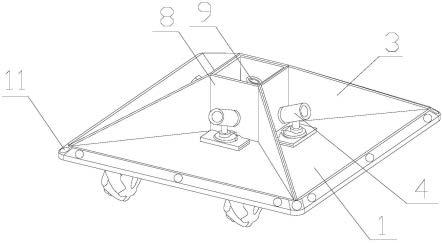
19.图4为本实用新型的另一种巡逻机器人结构示意图;
20.图5为图4的巡逻机器人的侧视图;
21.图6为图4的巡逻机器人的俯视图;
22.图7为图1和图4的巡逻机器人的仰视图。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.本发明第一实施例的巡逻机器人如图1~3和7所示,包括:底座1,所述底座1下方设有行走部2,所述底座1上方设有垂直于底座1的第一隔板3。所述第一隔板3将所述底座1划分为围绕底座1中心的至少三个外围区域,每个所述外围区域内分别设有第一摄像头4,所述第一摄像头4不超出第一隔板3的顶部。所述底座1内设有电池6和主控板5,所述第一摄像头4连接所述主控板5。所述主控板5设有无线通信模块,无线通信模块可以是4g或5g通信模块等,所述电池为主控板5、行走部2和第一摄像头4供电。
25.本实施例中,行走部2可以为履带或麦克纳姆轮等,由电机驱动履带或麦克纳姆轮,麦克纳姆轮便于机器人横移和转向,电池为电机供电。工作时,行走部2带动该巡逻机器人在停车场的道路边缘行走,其中,底座1上方设有垂直于底座1的第一隔板3,所述第一隔板3将所述底座1划分为围绕底座1中心的至少三个外围区域,每个所述外围区域内分别设有第一摄像头4,至少三个摄像头便于在巡逻时360度拍摄周围环境图像,将拍摄的图像发送至主控板5,主控板5通过无线通信模块将该图像传输至监控中心,实现了大型停车场的无人巡逻,降低了人力成本。而且整个巡逻机器人呈一个扁平的板状结构,能够在车下穿行,能躲避停车场道路上的车辆。
26.需要说明的是:主控板5通过无线通信模块接收监控中心的控制信号,以控制巡逻机器人行走(监控室内的工作人员通过巡逻机器人拍摄的图像进行遥控)。也可以是在主控板5内预设好路线,自动行走。两种行走技术均是成熟技术,此处不再赘述。
27.优选地,第一摄像头4为防雨防尘摄像头,便于在雨天作业。
28.本实施例的巡逻机器人,底座1上方设有垂直于底座1的第一隔板3,所述第一隔板
3将所述底座1划分为围绕底座中心的至少三个外围区域,每个所述外围区域内分别设有第一摄像头4,所述第一摄像头4的不超出第一隔板3的顶部,第一摄像头4被隔板3保护,使得巡逻机器人在车下穿行时,不会碰到车辆底盘而被刮坏。
29.本实施例中,第一隔板3靠近底座1中心一端到靠近底座1边缘一端呈高度递减的趋势,即第一隔板3呈楔形。每个所述外围区域内的第一摄像头4靠近所述底座1中心设置,即第一摄像头4设置在靠近第一隔板3最高的一端,这样保证第一摄像头4不超出第一隔板3顶部。而且第一隔板3高度逐渐降低,不遮挡第一摄像头4的视觉范围。
30.进一步地,每个所述外围区域顶部均设有第一透明罩7,所述第一隔板3支撑所述第一透明罩7。第一透明罩7起到防雨防尘的作用(这样第一摄像头4可采用成本较低的普通摄像头),而且使得每个外围区域顶部形成一个斜面,使得整个巡逻机器人呈类似减速带的形状,即底部大顶部小,这样在车辆不小心压到巡逻机器人时,车辆驾驶员有类似过减速带的感觉,而不会存在较大的颠簸,车辆轮胎在压到斜面时,巡逻机器人与车辆轮胎接触面更大,承压能力更强。
31.本发明第二实施例的巡逻机器人如图4~7所示,在第一实施例结构的基础上,还包括:第二隔板8,第二隔板8将所述底座1中心围成中心区域,第一隔板3位于中心区域外侧,将底座1划分成围绕所述中心区域的至少三个所述外围区域,所述中心区域内设有镜头朝上的第二摄像头9,所述第二摄像头9不超出第二隔板8的顶部,所述第二摄像头9连接所述主控板5。第二摄像头9用于拍摄车辆底盘图像,将车辆底盘图像发送至主控板5,主控板5的无线通信模块将底盘图像发送至监控中心,监控中心根据底盘图像发现有漏油或刮伤的情况时,根据停车位置信息查询车主信息,并通知车主。优选地,第二摄像头9为防雨防尘摄像头,便于在雨天作业。
32.本实施例中,第一隔板3靠近中心区域一端到靠近底座1边缘一端呈高度递减的趋势,即第一隔板3呈楔形。每个所述外围区域内的第一摄像头4靠近所述底座1中心设置,即第一摄像头4设置在靠近第一隔板3最高的一端,这样保证第一摄像头4不超出第一隔板3顶部。而且第一隔板3高度逐渐降低,不遮挡第一摄像头4的视觉范围。
33.进一步地,每个所述外围区域顶部均设有第一透明罩7,所述中心区域顶部设有第二透明罩10,所述第一隔板3支撑所述第一透明罩7,所述第二隔板8支撑所述第二透明罩10。第一透明罩7和第二透明罩10起到防雨防尘的作用(这样第一摄像头4和第二摄像头9均可采用成本较低的普通摄像头),而且使得每个外围区域顶部形成一个斜面,使得整个巡逻机器人呈类似减速带的形状,即底部大顶部小,这样在车辆不小心压到巡逻机器人时,车辆驾驶员有类似过减速带的感觉,而不会存在较大的颠簸,车辆轮胎在压到斜面时,巡逻机器人与车辆轮胎接触面更大,承压能更强。
34.上述两个实施例中,底座1可以为正方形或圆形底座,图1~7中示出了正方形底座的情况,所述第一隔板3将所述底座1平均划分为四个外围区域,每个外围区域均设置一个第一摄像头4,共四个第一摄像头4,使得巡逻机器人的前后左右都有第一摄像头4,每个第一摄像头4覆盖区域较小,可以采用较小广角的摄像头,尽量减小图像畸变。
35.上述两个实施例中,所述底座边缘设有雷达11,雷达11连接主控板5,雷达11用于该巡逻机器人在车底穿行或从车侧绕行时避开障碍(如:行人或其它车辆),增强避障能力。
36.上述两个实施例中,底座1内还设有扬声器12,所述扬声器12连接所述主控板5,用
于发出充电提示音或警告音,当有小孩靠近玩耍时或发现异常情况时发出警告音。
37.上述两个实施例中,底座1边缘设有防撞条13,防撞条13起缓冲作用,可以是橡胶条,防止碰到马路牙边缘对巡逻机器人造成损失,也防止巡逻机器人碰到行人或行人不小心踢到底座1边缘对行人造成伤害。
38.上述两个实施例中,底座1内还设有定位模块,定位模块连接所述主控板5,用于将位置信息通过主控板5的无线通信模块发送至监控中心,而且若巡逻机器人被盗时,可通过位置信息追回巡逻机器人。
39.基于该巡逻机器人的硬件结构,该巡逻机器人具有较强的扩展运用功能,例如:在主控板5中预先存储(可以是人为录入地图,还可以巡逻机器人识别车库中道路,自行创建地图)地下车库的地图及相应的定位导航程序,在巡逻时第一摄像头4拍摄车牌,主控板5记录被拍摄车牌的车辆在地图上的位置。车主到地下车库寻找车辆时,可通过手机登录车辆查询系统,输入车牌后,该车辆查询系统会分派一个巡逻机器人为车主导航至停车位置。又例如:巡逻机器人用于路侧停车收费,巡逻机器人在车下穿行,第一摄像头4用于拍摄车牌,将车牌发送至主控板5,主控板5将车牌和当前时间通过通信模块发送至收费管理系统。
40.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1