一种用于PPU机械手的双横向滑轨滑块机构的制作方法
一种用于ppu机械手的双横向滑轨滑块机构
技术领域
1.本实用新型涉及ppu机械手的构造,特别涉及一种用于ppu机械手的双横向滑轨滑块机构。
背景技术:
2.ppu机械手,又称ppu取放机械手,是一种纯凸轮结构移栽机械手,在伺服或步进马达的驱动下,执行元件按预定的轨迹运行。主要用于在局促的空间内自动搬运零件。横向滑轨滑块的配合构造是ppu取放机械手的核心构造之一,通过其来对ppu机械手的横向移动进行导向,因此其稳定性、精确性是影响ppu机械手运行精度及寿命的因素之一。
3.东莞市禹瑞机电设备有限公司于2021-03-12日申请并于2021-11-02日公开的实用新型专利《一种用于ppu机械手的导轨滑块固定机构》,申请号202120523148.9,公开号cn 214569012 u;其所公开的一种用于ppu机械手的导轨滑块固定机构便涉及到横向导轨滑块构造。但是,上述实用新型专利中的横向导轨滑块构造采用的是单滑轨构造(即一条滑轨上排列设置两个滑块),于是在产品使用运行过程中发现,由于滑块与单滑轨配合的前后方向的刚性不足,容易产生前后方向的晃动,影响运行精度。而且,单滑轨构造,其负载能力也有所不足,一旦负载较重,横向滑块受到较重的负载力,容易产生倾斜偏离,进而影响其运行的顺畅性及使用寿命。
技术实现要素:
4.针对上述不足,本实用新型的目的在于,提供一种用于ppu机械手的双横向滑轨滑块机构,采用双横向滑轨构造,提高横向滑块的前后刚性,使得运行时前后方向的变形量减少,进而提高运行精度和使用寿命。
5.本实用新型采用的技术方案为:一种用于ppu机械手的双横向滑轨滑块机构,包括横向导轨及横向滑块,所述横向导轨设置在固定背板上,所述横向滑块设置在横向导轨上;
6.所述横向导轨包括两根,分别为第一横向导轨、第二横向导轨,所述第一横向导轨、第二横向导轨相互平行设置,横向滑块包括两个,分别为第一横向滑块、第二横向滑块,所述第一横向滑块、第二横向滑块分别对应设置在第一横向导轨、第二横向导轨上;还包括横向滑块连接件,所述横向滑块连接件盖设在第一横向滑块、第二横向滑块的顶部,将第一横向滑块与第二横向滑块连接固定起来。
7.进一步,所述固定背板上设置第一横向定位槽、第二横向定位槽,所述第一横向导轨、第二横向导轨分别对应设置在第一横向定位槽、第二横向定位槽上。
8.进一步,所述横向滑块连接件的中心位置沿横向设置有限位间隔肋条,所述限位间隔肋条卡入第一横向滑块、第二横向滑块之间的横向间隙中,且限位间隔肋条的上、下侧面分别与第一横向滑块下侧面、第二横向滑块上侧面的相互紧贴。
9.进一步,所述横向滑块连接件对应第一横向滑块、第二横向滑块的顶部分别设置有第一横向滑块安装位、第二横向滑块安装位,所述限位间隔肋条位于第一横向滑块安装
位、第二横向滑块安装位之间,将第一横向滑块安装位、第二横向滑块安装位间隔开来。
10.进一步,所述第一横向滑块包括排列设置的两个子横向滑块,所述第二横向滑块也包括两个排列设置的子横向滑块。
11.本实用新型具有以下优点:采用双横向滑轨配合双横向滑块,提高横向滑块的前后刚性,使得运行时前后方向的变形量减少,进而提高运行精度和使用寿命。第一横向导轨、第二横向导轨相互平行设置,且分别设置第一横向滑块、第二横向滑块,并通过横向滑块连接件将第一横向滑块与第二横向滑块连接固定起来,如此一来,两组横向导轨滑块相互加强、相互纠正,提高刚性及减少变形量。
12.下面结合附图说明与具体实施方式,对本实用新型作进一步说明。
附图说明
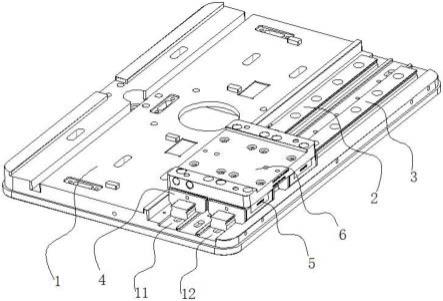
13.图1为双横向滑轨滑块机构的整体结构示意图;
14.图2为图1的拆分结构示意图;
15.图3为图2的拆分结构示意图;
16.图4为第一横向滑块、第二横向滑块与横向滑块连接件的配合结构示意图;
17.图5为横向滑块连接件的结构示意图;
18.图6为双横向滑轨滑块机构在pu机械手上的应用示意图;
19.图中:固定背板1;第一横向定位槽11;第二横向定位槽12;第一横向导轨2;第二横向导轨3;第一横向滑块4;第二横向滑块5;横向滑块连接件6;限位间隔肋条61;第一横向滑块安装位62;第二横向滑块安装位63。
具体实施方式
20.下面将结合附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.参见图1至6,本实施例所提供的用于ppu机械手的双横向滑轨滑块机构,包括横向导轨及横向滑块,所述横向导轨设置在固定背板1上,所述横向滑块设置在横向导轨上;
22.所述横向导轨包括两根,分别为第一横向导轨2、第二横向导轨3,所述第一横向导轨1、第二横向导轨2相互平行设置,横向滑块包括两个,分别为第一横向滑块4、第二横向滑块5,所述第一横向滑块4、第二横向滑块5分别对应设置在第一横向导轨2、第二横向导轨3上;还包括横向滑块连接件6,所述横向滑块连接件6盖设在第一横向滑块4、第二横向滑块5的顶部,将第一横向滑块4与第二横向滑块5连接固定起来。在此需要说明的是,第一横向滑块4可以包括分离设置的两个甚至三个子滑块。第二横向滑块5亦是如此。本实施例中,所述第一横向滑块4包括排列设置的两个子横向滑块,所述第二横向滑块5也包括两个排列设置的子横向滑块。
23.第一横向导轨2、第二横向导轨3相互平行设置,且分别设置第一横向滑块4、第二横向滑块5,并通过横向滑块连接件6将第一横向滑块4与第二横向滑块5连接固定起来,如此一来,两组横向导轨滑块相互加强、相互纠正,提高刚性及减少变形量。
24.具体地,所述固定背板1上设置第一横向定位槽11、第二横向定位槽12,所述第一横向导轨2、第二横向导轨3分别对应设置在第一横向定位槽11、第二横向定位槽12上。
25.更具体地,所述横向滑块连接件6的中心位置沿横向设置有限位间隔肋条61,所述限位间隔肋条61卡入第一横向滑块4、第二横向滑块5之间的横向间隙中,且限位间隔肋条61的上、下侧面分别与第一横向滑块4下侧面、第二横向滑块5上侧面的相互紧贴。
26.如此设置,可以很好地提高第一横向导轨、第二横向导轨、第一横向滑块、第二横向滑块的安装精度及强度。更重要的是,提高滑块与导轨的上下对应度,毕竟是两组横向导轨滑块相互配合,如果不能保证绝对的对应精度,容易产生干涉,影响运行。而横向定位槽、限位间隔肋条的设置,很好地解决了这个问题。
27.具体地,所述横向滑块连接件6对应第一横向滑块4、第二横向滑块5的顶部分别设置有第一横向滑块安装位62、第二横向滑块安装位63,所述限位间隔肋条61位于第一横向滑块安装位62、第二横向滑块安装位63之间,将第一横向滑块安装位62、第二横向滑块安装位63间隔开来。
28.如此设置,可以便于第一横向滑块4、第二横向滑块的安装固定(例如可以通过螺丝螺孔配合结构来进行安装固定),并且很好地利用限位间隔肋条61来进行限定,保证精度。
29.具体地,所述第一横向导轨2、第二横向导轨3的底部两侧皆设置有倒角。更具体地,所述第一横向滑块4、第二横向滑块5的顶部两侧皆设置有倒角。通过设置倒角,可以避免部件在直角安装时产生抵顶,提高装配的科学性。
30.本实用新型并不限于上述实施方式,采用与本实用新型上述实施例相同或近似的技术特征,而得到的其他一种用于ppu机械手的双横向滑轨滑块机构,均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1