一种运动空间可调的串联机器人负载辨识方法与流程
本发明涉及工业机器人控制,特别是涉及一种运动空间可调的串联机器人负载辨识方法。
背景技术:
1、在机器人控制过程中,负载辨识作为机器人最重要功能之一,是碰撞检测、拖拽示教以及控制增益自整定等的前提条件,其对于机器人的运动控制、安全交互等多方面均具有重要影响。然而,现有的机器人负载辨识机器人方法普遍存在以下缺点:(1)通常需要在机器人各关节轴协同运动的情况下进行负载辨识,其对于机器人的运动范围要求较高,在一些运动空间受限的情况下,负载辨识的结果不准确;(2)由于实际应用中的机器人负载具有复杂性和时变性,现有的负载辨识方法难以准确跟踪和预测负载变化,从而导致负载辨识精度较低,限制了机器人在实际应用中的性能;(3)现有负载辨识方法的辨识过程时间较长,难以保证机器人动作的实时性。
2、因此,亟需开发一种运动空间可调、辨识精度高、耗时少的机器人负载辨识方法。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种运动空间可调的串联机器人负载辨识方法,以解决现有技术中机器人在负载辨识过程中运动空间受限、辨识精度低以及辨识时间较长的问题。
2、为达到上述目的,本发明提供一种运动空间可调的串联机器人负载辨识方法,包括以下步骤:
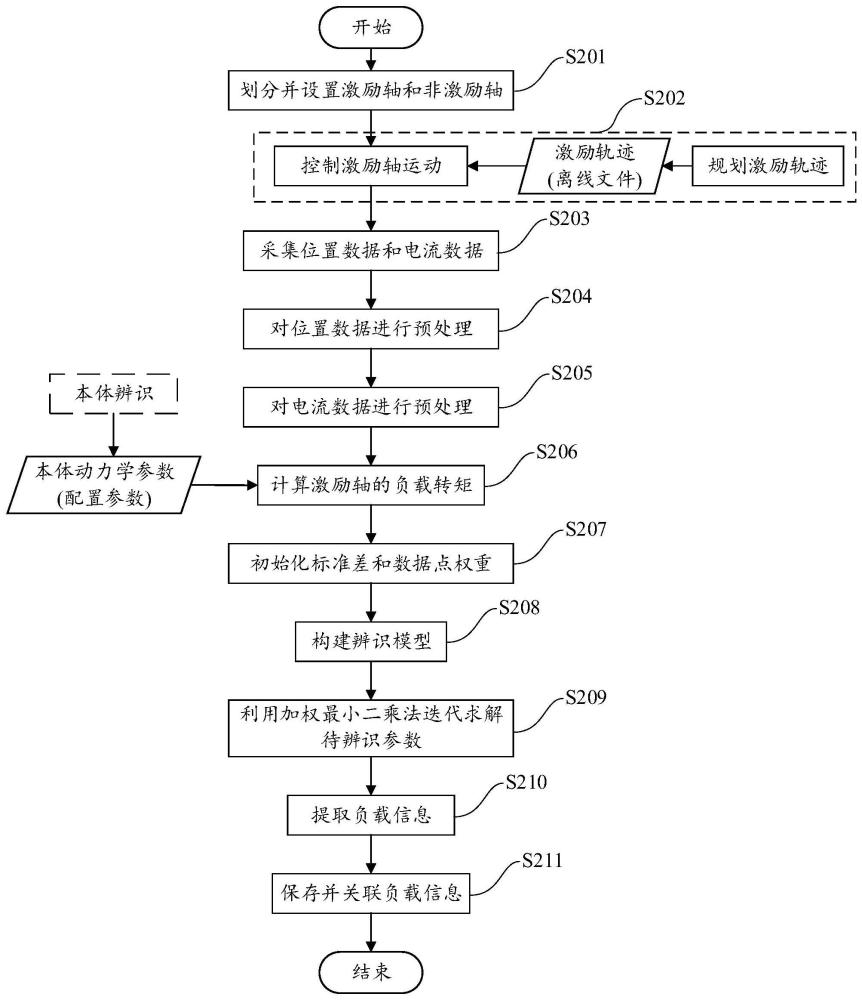
3、将机器人的轴划分为激励轴和非激励轴,并设定各激励轴和各非激励轴的初始参数;
4、控制激励轴按照预设激励轨迹运动,采集各激励轴的位置数据和电流数据并对位置数据及电流数据进行预处理,得到激励轴的关节位置、关节速度和关节加速度以及连杆侧转矩;
5、基于机器人的本体动力学参数以及关节位置、关节速度和关节加速度和连杆侧转矩计算各激励轴的负载转矩;
6、根据所述负载转矩构建辨识模型,基于所述辨识模型计算并提取负载信息。
7、进一步的,在控制激励轴按照预设激励轨迹运动,采集各激励轴的位置数据和电流数据并对位置数据及电流数据进行预处理,得到激励轴的关节位置、关节速度和关节加速度以及连杆侧转矩的步骤中,包括以下子步骤:
8、设置各激励轴的激励轨迹,并控制各激励轴按照对应的激励轨迹持续运动预设时间;
9、按照预设采样频率在所述预设时间内分别采集各激励轴在对应关节位置处的位置数据和电流数据;
10、对位置数据进行预处理得到激励轴的关节位置、关节速度和关节加速度;
11、对电流数据进行预处理得到激励轴的连杆侧转矩。
12、进一步的,在对位置数据进行预处理得到激励轴的关节位置、关节速度和关节加速度的步骤中,对位置数据进行预处理的具体方法为:
13、获取采集到的位置数据,对各位置数据对应的关节位置在预设截止频率下进行滤波得到滤波后的关节位置信号;
14、对所述关节位置信号进行差分处理得到对应关节位置的关节速度信号和关节加速度信号;
15、按照第一预设比率对所述关节位置信号、关节速度信号和关节加速度信号进行下采样处理得到各激励轴的关节位置、关节速度和关节加速度。
16、进一步的,在对电流数据进行预处理得到激励轴的连杆侧转矩的步骤中,对电流数据进行预处理的具体方法为:
17、获取采集到的电流数据,并按照第二预设比率对所述电流数据进行下采样得到采样后的电流数据;
18、根据采样后的电流数据计算得到各激励轴在对应关节位置的连杆侧转矩。
19、进一步的,在基于机器人的本体动力学参数以及关节位置、关节速度和关节加速度和连杆侧转矩计算各激励轴的负载转矩的步骤中,计算负载转矩的具体方法为:
20、根据各激励轴在对应关节位置的位置数据确定机器人的运动状态;
21、根据关节位置及运动状态,利用机器人动力学方程并基于机器人的本体动力学参数对所述动力学方程进行求解,计算得到各激励轴的无负载转矩;
22、根据所述机器人的运动状态、无负载转矩和连杆侧转矩计算得到各激励轴在对应关节位置处的负载转矩。
23、进一步的,在基于机器人的本体动力学参数以及关节位置、关节速度和关节加速度和连杆侧转矩计算各激励轴的负载转矩的步骤中,所述激励轴的负载转矩表示为:
24、τeij=τsij-aijπ;
25、其中,τeij为第i个激励轴在第j个关节位置处的负载转矩,i=1,2,...,i,i为激励轴的数量,j=1,2,...,j,j为采样点的数量,τsij为第i个激励轴在第j个采样点的连杆侧转矩,aij为基于位置数据计算得到的第i个激励轴在第j个采样点的回归矩阵,π为机器人的本体动力学参数。
26、进一步的,在根据所述负载转矩构建辨识模型,基于所述辨识模型计算并提取负载信息的步骤中,包括以下子步骤:
27、初始化各激励轴的负载转矩的标准差以及数据点权重;
28、根据所述负载转矩及其标准差和数据点权重构建辨识模型;
29、基于所述辨识模型迭代求解待辨识参数并更新标准差及数据点权重直至标准差及数据点权重收敛,得到最优待辨识参数;
30、从所述最优待辨识参数中提取负载信息。
31、进一步的,在根据所述负载转矩及其标准差和数据点权重构建辨识模型的步骤中,所述辨识模型表示为:
32、
33、其中,τeij为第i个激励轴在第j个采样点的负载转矩,i=1,2,...,i,i为激励轴的数量,j=1,2,...,j,j为采样点的数量,wij为第i个激励轴对应的第j个采样点的权重,σi为第i个激励轴对应的负载转矩的标准差,bij为第i个激励轴在第j个采样点与负载相关的回归矩阵,p为与负载相关的待辨识参数。
34、进一步的,在从所述最优待辨识参数中提取负载信息的步骤中,提取负载信息的具体方法为:
35、在所述最优待辨识参数中提出与负载相关的辨识参数,根据各辨识参数与负载动力学参数及连杆动力学参数的关系,分别计算得到各辨识参数的辨识值,确定机器人的负载信息。
36、进一步的,在根据所述负载转矩构建辨识模型,基于所述辨识模型计算并提取负载信息的步骤之后,还包括以下步骤:
37、保存负载信息,并将所述负载信息与机器人坐标系进行关联。
38、本发明将机器人的轴划分成激励轴和非激励轴,通过非激励轴调整机器人的运动空间,使其离开干涉空间,从而避免机器人与周围物体发生干涉,如此,在执行负载辨识时,可根据实际需要调整机器人的运动空间,不受限于在固定空间;同时,通过控制激励轴按照预先规划的激励轨迹运动,并在激励轴运动过程中实时采集激励轴的位置数据及电流数据,结合机器人本体动力学参数计算各激励轴的负载转矩,充分激发负载的动力学特性,可以准确计算出负载信息,从而提高负载的辨识精度;并且,激励轴的数量可以自定且通常较少,辨识过程耗时较少,利用迭代加权最小二乘法计算负载相关的待辨识参数,可以更快收敛以得到最优的辨识参数,以简化计算过程,提高计算效率,能够进一步缩短辨识时长。
- 还没有人留言评论。精彩留言会获得点赞!