石墨接头机器人自动装卡簧、装栓机的制作方法
1.本发明石墨接头机器人自动装卡簧、装栓机涉及的是一种冶炼用的电极接头的装卡簧、装栓设备,属于冶金电极接头加工技术领域。
背景技术:
2.石墨电极电极接头两端均制有锥螺纹,石墨电极接头广泛应用于冶金行业。接头中的栓(销)和卡簧是由人工进行组装。实践中,随着科技的不断进步,人工搬运工件组装栓(销)、卡簧存在费时费力现象,从而导致加工时间过长,影响效率。
技术实现要素:
3.本发明目的是针对上述不足之处,提供一种石墨接头机器人自动装卡簧、装栓机,采取机器人组装销、卡簧来提高工作效率,降低人工体力劳动量。
4.石墨接头机器人自动装卡簧、装栓机是采取以下技术方案实现:石墨接头机器人自动装卡簧、装栓机包括栓(销)上料盘、卡簧振动盘、视觉相机、扫码系统、石墨接头搬运机器人、装栓卡簧机器人和装栓、装卡簧旋转工作台。
5.石墨接头搬运机器人设置在石墨接头自动加工线的石墨接头输送轨道前端部,装卡簧旋转工作台设置在石墨接头搬运机器人一侧,装栓卡簧机器人设置在石墨接头搬运机器人前部,栓(销)上料盘、卡簧振动盘分别设置在装栓卡簧机器人前侧两边。
6.石墨接头搬运机器人设置有石墨接头搬运机械手,石墨接头搬运机械手前端装有真空吸盘,用于吸取石墨接头,从石墨接头输送轨道搬运到装栓卡簧旋转工作台上。石墨接头搬运机械手上部装有扫码系统,用于扫码石墨接头上二维码,识别石墨接头信息,对石墨接头进行分类搬运、存放。所述的扫码系统采用采用二维码扫码器。
7.装栓、装卡簧旋转工作台上装有石墨接头夹具,通过气缸夹紧石墨接头。装栓、装卡簧旋转工作台下部装有伺服电机,伺服电机驱动装栓、装卡簧旋转工作台工位转动,便于石墨接头装栓、装卡簧。所述的装栓、装卡簧旋转工作台设有四个旋转工位。
8.装栓卡簧机器人设置有两组装栓卡簧机械手,装栓卡簧机械手上部装有视觉相机,用于识别石墨接头上栓(销)、卡簧孔位置,装栓卡簧机械手上部前端装有气动手指,用于夹取和安装栓、卡簧。
9.栓(销)上料盘上均布有多个栓(销)料孔,栓(销)料孔中装有栓(销)。
10.卡簧振动盘下部装有电磁振动器,卡簧振动盘上部设置有卡簧输出轨道,卡簧振动盘下部装有电磁振动器,卡簧振动盘中的卡簧经过电磁振动器振动,沿卡簧输出轨道输出,供装栓卡簧机械手的气动手指夹取。
11.石墨接头机器人自动装卡簧、装栓机配套有电器控制箱,装有plc可编程控制器,并装有机器人控制柜,控制石墨接头搬运机器人、装栓卡簧机器人按设定数控程序工作。
12.石墨接头机器人自动装卡簧、装栓机工作方法,按如下步骤进行:石墨接头搬运机器人的石墨接头搬运机械手前端装有的真空吸盘,吸取石墨接头,将石墨接头从石墨接头
输送轨道搬运到装栓卡簧旋转工作台上。在进行栓(销)、卡簧植入时,需在扫码系统对石墨接头进行读码以后,再搬运至装栓、装卡簧旋转工作台(四工位旋转系统),送入石墨接头搬运机器人抓取位,由石墨接头搬运机器人抓取石墨接头工件放入旋转工位。石墨接头上面圆型均布四个销、卡簧孔位,当石墨接头搬运机器人放置好石墨接头后,装栓卡簧机器人的装栓卡簧机械手再分别从栓(销)上料盘、卡簧振动盘上抓取栓(销)和卡簧,通过视觉相机找准石墨接头上销、卡簧孔位,然后对其进行栓(销)、卡簧的植入,石墨接头装好栓(销)、卡簧后,由石墨接头搬运机器人抓取装好栓(销)、卡簧的石墨接头产品放置到输送线体,流入下一个工站。
13.石墨接头机器人自动装卡簧、装栓机具有以下特点:1、结构布局设计、控制设计合理,运行平稳。
14.2、组装周期在120
‑
180秒之间,加工效率高。
15.3、传动简单可靠,移动轻便灵活,自动化程度高,产品质量稳定可靠。
16.4、控制系统完善,有反馈环节和安全措施,适合大批量加工。
17.5、采取机器人组装栓、卡簧来提高工作效率,降低人工体力劳动量。
18.附图说明
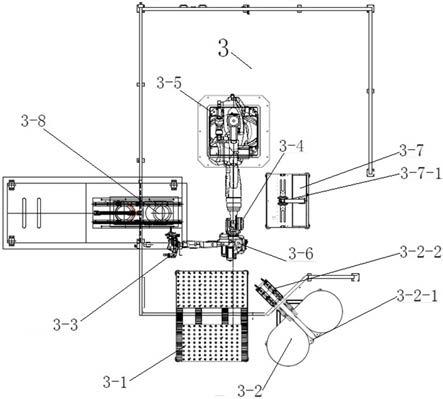
19.以下将结合附图对本发明作进一步说明:图1是石墨接头机器人自动装卡簧、装栓机结构示意图。
20.图中:3、石墨接头机器人自动装卡簧装栓、装栓机;3
‑
1、栓(销)上料盘,3
‑
2、卡簧振动盘,3
‑
3、视觉相机,3
‑
4、扫码系统,3
‑
5、石墨接头搬运机器人,3
‑
6、装栓卡簧机器人,3
‑
7、装栓、装卡簧旋转工作台;3
‑7‑
1、石墨接头夹具;3
‑2‑
1、电磁振动器,3
‑2‑
2、卡簧输出轨道。
具体实施方式
21.参照附图1,石墨接头机器人自动装卡簧装栓、装栓机3包括栓(销)上料盘3
‑
1、卡簧振动盘3
‑
2、视觉相机3
‑
3、扫码系统3
‑
4、石墨接头搬运机器人3
‑
5、装栓卡簧机器人3
‑
6和装栓、装卡簧旋转工作台3
‑
7。
22.石墨接头搬运机器人3
‑
5设置在石墨接头自动加工线的石墨接头输送轨道3
‑
8前端部,装卡簧旋转工作台3
‑
7设置在石墨接头搬运机器人3
‑
5一侧,装栓卡簧机器人3
‑
6设置在石墨接头搬运机器人3
‑
5前部,栓(销)上料盘3
‑
1、卡簧振动盘3
‑
2分别设置在装栓卡簧机器人3
‑
6前侧两边。
23.石墨接头搬运机器人3
‑
5设置有石墨接头搬运机械手,石墨接头搬运机械手前端装有真空吸盘,用于吸取石墨接头,从石墨接头输送轨道3
‑
8搬运到装栓、装卡簧旋转工作台3
‑
7上。石墨接头搬运机械手上部装有扫码系统3
‑
4,用于扫码石墨接头上二维码,识别信息后对石墨接头进行分类搬运、存放。所述的扫码系统3
‑
4采用二维码扫码器。
24.装栓、装卡簧旋转工作台3
‑
7上装有石墨接头夹具3
‑7‑
1,通过气缸夹紧石墨接头。装栓、装卡簧旋转工作台3
‑
7下部装有伺服电机,伺服电机传动装栓、装卡簧旋转工作台工位转动,便于石墨接头装栓、装卡簧。所述的装栓、装卡簧旋转工作台3
‑
7设有四个旋转工
位。
25.装栓卡簧机器人3
‑
6设置有两组装栓卡簧机械手,装栓卡簧机械手上部装有视觉相机3
‑
3,用于识别石墨接头上栓(销)、卡簧孔位置,装栓卡簧机械手上部前端装有气动手指,用于夹取和安装栓、卡簧。所述的视觉相机3
‑
3采用工业数码相机。
26.栓(销)上料盘3
‑
1上均布有多个栓(销)料孔,栓(销)料孔中装有栓(销)。
27.卡簧振动盘3
‑
2下部装有电磁振动器3
‑2‑
1,卡簧振动盘3
‑
2上部设置有卡簧输出轨道3
‑2‑
2,卡簧振动盘下部装有电磁振动器3
‑2‑
1,卡簧振动盘3
‑
2中的卡簧经过电磁振动器3
‑2‑
1振动,沿卡簧输出轨道3
‑2‑
2输出,供装栓卡簧机械手3
‑
6的气动手指夹取。
28.石墨接头机器人自动装卡簧、装栓机配套有电器控制箱,装有plc可编程控制器,并装有机器人控制柜,控制石墨接头搬运机器人、装栓卡簧机器人按设定数控程序工作。
29.石墨接头机器人自动装卡簧、装栓机工作方法,按如下步骤进行:石墨接头搬运机器人3
‑
5的石墨接头搬运机械手前端装有真空吸盘,用于吸取石墨接头,从石墨接头输送轨道3
‑
8搬运到装栓卡簧旋转工作台3
‑
7上。在进行栓(销)、卡簧植入时,需在扫码系统3
‑
4对石墨接头进行读码以后,再搬运至装栓、装卡簧旋转工作台3
‑
7(四工位旋转系统),送入石墨接头搬运机器人3
‑
5抓取位,由石墨接头搬运机器人3
‑
5抓取石墨接头工件放入旋转工位。石墨接头上面圆型均布四个销、卡簧孔位,当石墨接头搬运机器人3
‑
5放置好石墨接头后,装栓卡簧机器人3
‑
6的装栓卡簧机械手再分别从栓(销)上料盘1、卡簧振动盘3
‑
2上抓取栓(销)和卡簧,通过视觉相机3
‑
3找准石墨接头上销、卡簧孔位孔位,然后对其进行栓(销)、卡簧的植入,石墨接头装好栓(销)、卡簧后,由石墨接头搬运机器人3
‑
5抓取装好栓(销)、卡簧的石墨接头产品放置到输送线体,流入下一个工站。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1