一种轮驱组装系统的制作方法
1.本实用新型属于机械装配技术领域,尤其涉及一种轮驱组装系统。
背景技术:
2.电力机车厂组装车间针对于轮驱组装目前采用普通声响扳手进行作业,人员根据作业经验进行流程的作业工序的流程的控制,自动化程度不高,所有螺栓均为人工手动拧紧,人员作业强度高,并且采用传统的螺栓安装形式,无法获得安装过程中的真实扭矩,不便于进行数据追溯和结果分析。
3.为了提高电力机车厂组装车间针对于轮驱组装工序的卡控力度和实现手段,提高螺栓安装精度、防止扭矩漏打、实现数据自动记录,同时为了能实现指标量化、数据明确,可有效辅助操作人员提高作业质量,增强作业一致性和标准化,现研发设计一种轮驱组装智能防错系统。
技术实现要素:
4.鉴于上述的分析,本实用新型旨在提供一种轮驱组装系统,用以解决现有技术中轮驱组装劳动强度大,无法记录真是扭矩的难题。本实用新型的目的主要是通过以下技术方案实现的:
5.本实用新型提供了一种轮驱组装系统,该系统包括支撑单元、轴箱组装单元、电机组装单元、齿轮箱组装单元和升降台;
6.轴箱组装单元、电机组装单元、齿轮箱组装单元顺次吊装于支撑单元上;
7.升降台位于轴箱组装单元、电机组装单元、齿轮箱组装单元的下部;
8.轴箱组装单元用于组装轮驱的轴箱;
9.电机组装单元用于组装轮驱的电机;
10.齿轮箱组装单元用于组装轮驱的齿轮箱;
11.升降台用于放置轮驱,以及调整轮驱的高度。
12.进一步地,支撑单位为矩形框架结构,支撑单元包括至少6个立柱,立柱沿矩形框架的长边设置,立柱的顶部安装第一滑轨,第一滑轨的数量为2个,2个第一滑轨分别位于矩形框架的长边,第一滑轨上通过第一滑块依次安装第一主梁、第二主梁、第三主梁,轴向组装单元吊装于第一主梁上,电机组装单元吊装于第二主梁上,齿轮箱组装单元吊装于第三主梁上。
13.进一步地,轴箱组装单元包括2个结构相同、位置相对设置的螺栓紧固装置。
14.进一步地,电机组装单元包括1个螺栓紧固装置。
15.进一步地,齿轮箱组装单元1个螺栓紧固装置。
16.进一步地,螺栓紧固装置包括反力臂框架、显示器、反力臂、电控箱、扳手控制器和电动扳手;
17.电控箱安装于反力臂框架上,显示器吊装于反力臂框架上,反力臂的上端吊装于
反力臂框架上,反力臂的下端安装电动扳手,扳手控制器安装于反力臂上;
18.电控箱为显示器和扳手控制器提供电源,扳手控制器用于控制电动扳手。
19.进一步地,反力臂框架的上端面开设有第二滑轨,第二滑轨通过第二滑块与主梁装配;
20.反力臂框架的下端面开设有第三滑轨,第三滑轨通过第三滑块与反力臂装配。
21.进一步地,反力臂包括反力臂杆和反力臂套筒,反力臂杆的上端与反力臂套筒的下端通过弹簧连接,反力臂杆的下端安装电动扳手。
22.进一步地,轴箱组装单元、电机组装单元、齿轮箱组装单元分别安装不同规格的电动扳手。
23.进一步地,支撑单元的底部设有沿长方形框架长边方向的第四滑轨,升降台的底部设有第四滑块,升降台沿第四滑轨滑动。
24.与现有技术相比,本实用新型至少具有如下实用效果:
25.本实用新型的轮驱组装系统,提高电力机车厂组装车间针对于轮驱组装工序的卡控力度和实现手段,提高螺栓安装精度、防止扭矩漏打、实现数据自动记录,同时为了能实现指标量化、数据明确,可有效辅助操作人员提高作业质量,增强作业一致性和标准化。
26.本实用新型的其他特征和优点将在随后的说明书中阐述,并且,部分的特征和优点从说明书中变得显而易见,或者通过实施本实用新型而了解。本实用新型的目的和其他优点可通过在所写的说明书以及附图中所特别指出的结构来实现和获得。
附图说明
27.附图仅用于示出具体实施例的目的,而并不认为是对本实用新型的限制,在整个附图中,相同的参考符号表示相同的部件。
28.图1为轮驱组装系统的侧视图;
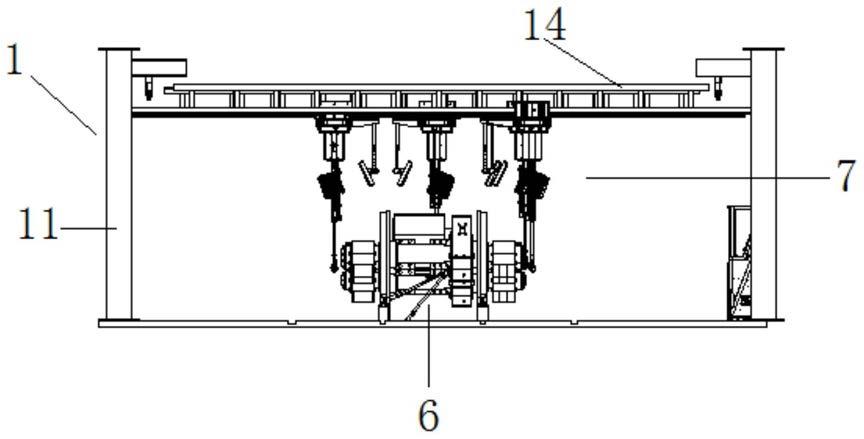
29.图2为轮驱组装系统的主视图;
30.图3为轮驱组装系统的结构示意图;
31.图4为轴箱组装单元的结构示意图;
32.图5为反力臂框架端面的局部放大图;
33.图6为作业顺序工位图;
34.图7为pad手持机模式下的作业流程示意图;
35.图8为作业过程异常情况处理流程图;
36.图9为作业人员使用pda手持机扫描信息流程图;
37.图10为软件控制架构及数据连接方式示意图。
38.图中:1
‑
支撑单元;11
‑
立柱;12
‑
第一滑轨;13
‑
第一滑块;14
‑
第一主梁;15
‑
第二主梁;16
‑
第三主梁;2
‑
轴箱组装单元;3
‑
电机组装单元;4
‑
齿轮箱组装单元;5
‑
升降台;51
‑
第四滑轨;52
‑
第四滑块;6
‑
轮驱;7
‑
螺栓紧固装置;71
‑
反力臂框架;711
‑
第二滑轨;713
‑
第三滑轨;72
‑
显示器;73
‑
反力臂;731
‑
反力臂杆;732
‑
反力臂套筒;74
‑
电控箱;75
‑
扳手控制器;76
‑
电动扳手。
具体实施方式
39.下面结合附图来具体描述本实用新型的优选实施例,其中,附图构成本实用新型一部分,并与本实用新型的实施例一起用于阐释本实用新型的原理,并非用于限定本实用新型的范围。
40.实施例1
41.一种轮驱组装系统,如图1
‑
10所示,该系统包括支撑单元1、轴箱组装单元2、电机组装单元3、齿轮箱组装单元4和升降台5。
42.轴箱组装单元2、电机组装单元3、齿轮箱组装单元4顺次吊装于支撑单元1上。
43.升降台5位于轴箱组装单元2、电机组装单元3、齿轮箱组装单元4的下部。
44.轴箱组装单元2用于组装轮驱6的轴箱。
45.电机组装单元3用于组装轮驱6的电机。
46.齿轮箱组装单元4用于组装轮驱6的齿轮箱。
47.升降台5用于放置轮驱6,以及调整轮驱6的高度。
48.具体的,支撑单元1为矩形框架结构,支撑单元1包括至少6个立柱11,立柱11沿矩形框架的长边设置,立柱11的顶部安装第一滑轨12,第一滑轨12的数量为2个,2个第一滑轨12分别位于矩形框架的2个长边,第一滑轨12上通过第一滑块13依次安装第一主梁14、第二主梁15、第三主梁16,轴箱组装单元2吊装于第一主梁14上,电机组装单元3吊装于第二主梁15上,齿轮箱组装单元4吊装于第三主梁16上。
49.轴箱组装单元2包括2个结构相同、位置相对设置的螺栓紧固装置7。
50.电机组装单元3包括1个螺栓紧固装置7。
51.齿轮箱组装单元4包括1个螺栓紧固装置7。
52.螺栓紧固装置7包括反力臂框架71、显示器72、反力臂73、电控箱74、扳手控制器75和电动扳手76。
53.电控箱74安装于反力臂框架71上,显示器72吊装于反力臂框架71上,反力臂73的上端吊装于反力臂框架71上,反力臂73的下端安装电动扳手76,扳手控制器75安装于反力臂73上。
54.电控箱74为显示器72和扳手控制器75提供电源,扳手控制器75用于控制电动扳手76。
55.反力臂框架71的上端面开设有第二滑轨711,第二滑轨711通过第二滑块与分别与第一主梁14、第二主梁15、第三主梁16装配。
56.反力臂框架71的下端面开设有第三滑轨713,第三滑轨713通过第三滑块与反力臂73装配。
57.反力臂73包括反力臂杆731和反力臂套筒732,反力臂杆731的上端与反力臂套筒732的下端通过弹簧连接,反力臂杆731的下端安装电动扳手76。
58.反力臂框架71将反力臂73的反力传递到第一主梁14,第二主梁15或第三主梁16上,并可以沿第一滑轨12在要求的范围内移动,反力臂73将电动76扳手的反力传递到主梁及第一滑轨上,也可根据作业情况实现在第一滑轨上移动。
59.轴箱组装单元2、电机组装单元3、齿轮箱组装单元4的下端分别安装不同规格的电动扳手76。
60.支撑单元1的底部设有沿长方形框架长边方向的第四滑轨51,升降台5的底部设有第四滑块52,升降台5沿第四滑轨51滑动。
61.轮驱组装系统还包括工控机、pda手持机、工具管理箱、服务器及作业管理软件。
62.具体的,工控机(含控制器)配置操作端电脑及软件,具有数据显示,卡控及记录功能,主要用于作业任务的下发,作业界面的显示,数据的本地查询,工控机放置于立柱一侧。
63.pda手持机具有rfid读取功能,可读取轮驱上的rfid标签,并具有作业数据实时显示功能,可将作业系统显示器上的关键作业信息进行显示。具有流程引导,数据显示和异常处理的功能。
64.工具管理箱:用于电动扳手、pda手持机的存放、充电及盘点、管理等,工具管理箱放置于立柱的另一侧。
65.服务器及作业管理软件:用于分析管理扭矩数据,可实时存储扭矩、人员等各类信息,在网页端运行,可实时形成分析图表,辅助质量分析和提高。服务器具有高可靠性磁盘阵列,确保数据安全。
66.操作者通过pda手持机实现与服务器及作业管理软件的交互,从而实现对操作者现场操作的指导;显示屏显示整个作业过程的指导界面;pda手持机具有rfid扫码功能,扭矩作业系统可连入主机厂内的条码管理系统并读取的rfid信息。
67.针对于空间狭窄,作业情况及角度复杂的环境,配合使用手动扳手完成扭紧作业,使作业更加灵活。
68.作业过程中,需使用现场现用的预紧扳手进行预紧,预紧后,采用电动扳手进行扭矩的卡控和目标值的扭紧。
69.轮驱组装系统,主要由三个作业工位,作业工位按照作业顺序排列,作业顺序如图6所示。
70.轮驱组装系统正常作业流程及作业内容,如图7所示:
71.系统作业过程,在终端进行任务的下发,任务下发完成后,整个作业过程依靠pda进行作业数据显示和流程的引导,若无流程变更,更易变更或相应的工作,则不进行终端操作。
72.相关人员工作时,首先需登录系统,身份验证后方可进行相应操作。
73.由工长,针对于当天作业任务进行下发,下发后,通过网络发放至手持机。
74.作业工人去往工具柜处领取pda手持机、扭矩扳手,领取后,关闭工具柜门,工具柜自动盘点。
75.作业人员登录手持机,接收任务,根据手持机提示,进行组装作业,并扫描相关rfid信息。
76.作业完成后,数据回传至服务器,关闭手持机,归还扳手及手持机。
77.当天作业任务完成。
78.异常故障处理流程及要求:
79.作业过程中,出现异常情况,例如:螺栓扭矩过大,登录异常,工具异常,数据读取操作失败等异常情况,需按照图8流程作业。
80.配件信息采集流程:
81.现场配备rfid标签及条码管理系统,可通过手持机扫描rfid信息,并通过开放的
接口,由扭矩管理系统软件调用条码管理信息数据,从而获取装配部件信息,将信息记录到作业数据内。
82.服务器及作业管理软件主要包括:服务器(后台管理)客户端、网页客户端、工作站(控制)客户端、手持机客户端四个模块。
83.服务器(后台管理)客户端包含三部分信息维护:
84.a.基础信息维护:用户信息维护、系统设置、职务设置、部门设置、角色设置。
85.b.通用基础信息维护:基础信息维护、机车—工作站信息维护、工作站—扳手配置维护、螺栓规格信息维护、套筒类型配置维护、工艺文件维护。
86.c.作业方案信息配置:零部件信息维护、组装类型信息维护、组装方案信息维护。
87.网页客户端包含:作业任务信息统计、作业结果统计与查询等功能。
88.扭矩工作站客户端包含:作业任务接收、螺栓拧紧控制、实时作业反馈、临时扭矩变更处理、安装结果查看和提交等。
89.手持机端包含:作业人员作业数据的显示,作业流程对的引导,作业结果的判断等。
90.与现有技术相比,本实用新型至少具有如下实用效果:
91.本实用新型的轮驱组装系统,提高电力机车厂组装车间针对于轮驱组装工序的卡控力度和实现手段,提高螺栓安装精度、防止扭矩漏打、实现数据自动记录,同时为了能实现指标量化、数据明确,可有效辅助操作人员提高作业质量,增强作业一致性和标准化。
92.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1