用于自卷钢管柱的自动埋弧焊装备的制作方法
1.本发明涉及一种焊接设备,特别涉及一种用于自卷钢管柱的自动埋弧焊装备。
背景技术:
2.随着城市现代化建设的持续推进,大型建筑越来越广泛的在城市基础设施的建设中普遍地采用,圆形钢管柱结构因其具有材料成本低、强度高、易加工、安装简单等诸多优势则作为主要的支撑构件得以广泛地应用与发展。
3.实际施工过程中,较多的情况下所采用的的圆形钢管柱为非标准件,则需工厂自行制作。现有技术中,卷制钢管柱一般是先将需要卷制的钢板切割成矩形状并机械卷制预成形,对预成形的钢管的纵向接口焊缝以及环接口焊缝进行焊接;经过探伤并滚圆后形成成品钢管柱。
4.而对于焊接工序,由于存在纵向焊缝和环焊缝,因此焊接在工艺上较为复杂,人工参与较多,特别是针对不同的管径的钢管柱来说,需要匹配不同的胎架,使得埋弧焊小车的焊丝与待焊焊缝间的相对位置,在焊接完成后,需先拆除胎架,才能吊装已完成焊接的圆管,这些工序整体上较为原始,大大增加了操作人员的劳动强度,降低了工作效率。
5.因此,需要对现有的圆管的埋弧焊方式进行改进,焊接设备具有通用性以及具有自动化功能,降低操作人员的劳动强度,制作用时短,提高工作效率。
技术实现要素:
6.有鉴于此,本发明的目的是提供一种用于自卷钢管柱的自动埋弧焊装备,焊接设备具有通用性以及具有自动化功能,降低操作人员的劳动强度,制作用时短,提高工作效率。
7.本发明的用于自卷钢管柱的自动埋弧焊装备,包括机架、工件支撑组件、焊接组件和自动控制系统;
8.所述工件支撑组件包括:
9.支撑座,固定设置;
10.支撑滚轮组件,包括若干沿工件的圆周方向布置于所述支撑座并用于支撑工件的滚轮,若干所述滚轮可与工件外表面在圆周方向相切转动的设置,至少一个滚轮设有驱动其转动的动力,从而带动工件沿圆周方向转动;
11.所述焊接组件包括:
12.焊接件基座,位于所述工件支撑组件的上部,以可被驱动的沿横向、纵向和上下方向移动的方式设置于机架;
13.焊丝输送件,固定设置于所述焊接件基座并设有将焊丝向下输送的焊丝通道,焊丝穿过所述焊丝通道并向下伸出;
14.焊剂输送件,固定设置于所述焊接件基座并具有一漏斗形储料腔和位于漏斗形储料腔底部的输料管,所述输料管的出口对应于焊丝的向下伸出的焊接位置;
15.所述自动控制系统包括:
16.焊缝位置检测单元,用于检测工件的焊缝所在位置;
17.中央处理单元,接收焊缝位置检测单元的焊缝位置信息,发出驱动焊接件基座移动的命令,带动所述焊丝输送件到达焊接位置完成焊接。
18.进一步,所述滚轮包括驱动滚轮和支撑滚轮,所述驱动滚轮和支撑滚轮分布位置在高度上不超出工件中心轴线,且驱动滚轮和支撑滚轮用于支撑工件的直径范围可调。
19.进一步,所述驱动滚轮设有滚轮驱动组件,所述滚轮驱动组件具有一转动动力输出端并用于驱动驱动滚轮转动,从而带动工件绕其中心轴线转动。
20.进一步,所述驱动滚轮为一个且与工件圆周方向最低点相对应向上支撑工件,所述支撑滚轮至少为两个且其中两个支撑滚轮的转动轴线与最小直径的工件的中心轴线平齐布置于工件的径向两侧;且支撑滚轮的横向位置可调使得驱动滚轮和支撑滚轮用于支撑工件的直径范围可调。
21.进一步,所述支撑滚轮为两个,两个支撑滚轮的转动轴线与最小直径的工件的中心轴线平齐布置于工件的径向两侧;
22.所述支撑滚轮设有支撑轮调节驱动装置,包括支撑滚轮安装座、支撑位置调节电机和支撑位置调节丝杆,所述支撑滚轮可转动的设置于支撑滚轮安装座,所述支撑位置调节电机为空心转子电机且安装于支撑座,与支撑位置调节电机的转子传动配合设有支撑位置调节螺母,所述支撑位置调节丝杆沿横向设置且一端固定于支撑滚轮安装座,另一端螺纹配合穿过支撑位置调节螺母螺纹配合以及穿入支撑位置调节电机的空心转子。
23.进一步,所述滚轮驱动组件包括滚轮驱动电机和滚轮传动副,滚轮驱动电机通过滚轮传动副驱动所述驱动滚轮。
24.进一步,所述支撑座包括至少两个且沿工件轴向并列布置,每个支撑座上均设有所述支撑滚轮组件。
25.进一步,还包括用于驱动所述焊接件基座沿横向、纵向和上下方向移动的方位驱动系统,所述方位驱动系统包括上下驱动组件、横向驱动组件和纵向驱动组件;
26.所述上下驱动组件包括上下驱动电机和由上下驱动电机驱动的上下移动的上下移动丝杆,所述上下驱动电机为空心转子电机,与上下驱动电机的转子传动配合设有上下驱动螺母,所述上下移动丝杆沿竖直方向设置且一端向下延伸固定于焊接件基座,另一端螺纹配合穿过上下驱动螺母以及穿入上下驱动电机的空心转子;
27.所述横向驱动组件包括横向驱动电机、横向驱动丝杆和横梁,所述横向驱动电机固定设置于横梁的一端,所述上下驱动电机以可单自由度往复横向移动的方式设置于所述横梁,所述横向驱动丝杆用于与上下驱动电机形成驱动配合且被所述横向驱动电机驱动转动,从而带动所述上下驱动电机沿横梁移动;
28.所述纵向驱动组件包括纵向驱动电机、纵向驱动丝杆和固定于机架的纵梁,所述横梁以可单自由度往复纵向移动的方式设置于所述纵梁;所述纵向驱动电机固定于纵梁并驱动所述纵向驱动丝杆转动并通过所述纵向驱动丝杆驱动所述横梁沿所述纵梁单自由度往复纵向移动。
29.进一步,所述上下驱动电机为两个沿纵向对应于焊接件基座的两端并列设置,所述上下移动丝杆对应的为两个,与每个上下驱动电机相对应设置两个并列的所述横梁,所
述上下驱动电机下部固定设有上下驱动电机座,所述驱动电机座以可单自由度往复横向移动的方式担在两个所述横梁,所述横向驱动丝杆螺纹配合穿过所述上下驱动电机座,且每个上下驱动电机座配合两个分列上下移动丝杆的两侧的所述横向驱动丝杆;
30.所述纵梁为两根且分别对应于横梁的两端设置,与每个上下驱动电机座所对应的两个所述横梁的两端分别固定设有一纵向滑梁形成矩形框架结构,所述矩形框架结构通过两个所述纵向滑梁单自由度往复纵向移动设置于对应的所述纵梁;
31.所述纵向驱动电机为两个分别对应固定于对应的所述纵梁的一端,所述纵向驱动丝杆为两个且分别螺纹配合顺序穿过两个上下驱动电机座所对应的矩形框架结构同侧的纵向滑梁。
32.进一步,所述焊接组件还包括转动设置于焊接件基座的焊丝盘,所述焊丝缠绕在所述焊丝盘并将焊丝输送至焊丝输送件的焊丝通道;
33.所述焊缝位置检测单元为固定于焊丝输送件的焊缝检测探头,所述焊缝检测探头的探测端部对应于焊丝的焊接位置;
34.所述自动控制系统还包括输入输出单元,所述输入输出单元用于向中央处理单元输入工件参数以及命令信息,并输出工作状态信息:
35.所述中央处理单元根据焊缝检测探头的探测信息和输入输出单元的工件参数以及命令信息,发出下列命令信息:
36.向支撑轮调节驱动装置发送命令以调整两个支撑滚轮的位置用于支撑不同管径的工件;
37.向滚轮驱动组件发送命令带动工件旋转,使得纵向焊缝位于焊接位置;
38.向方位驱动系统发出命令信息,带动焊接件基座运动使焊丝位于焊接位置。
39.本发明的有益效果:本发明的用于自卷钢管柱的自动埋弧焊装备,采用可驱动工件转动以及可移动方位的焊接组件的结构,可调整焊接位置,因而适应于不同尺寸的钢管柱工件,同时,通过焊缝定位实现自动焊接;使得焊接设备对于不同管径的钢管柱具有通用性和自动化功能,从而在焊接时降低操作人员的劳动强度,焊接制作用时短,提高工作效率,降低生产成本。
附图说明
40.下面结合附图和实施例对本发明作进一步描述。
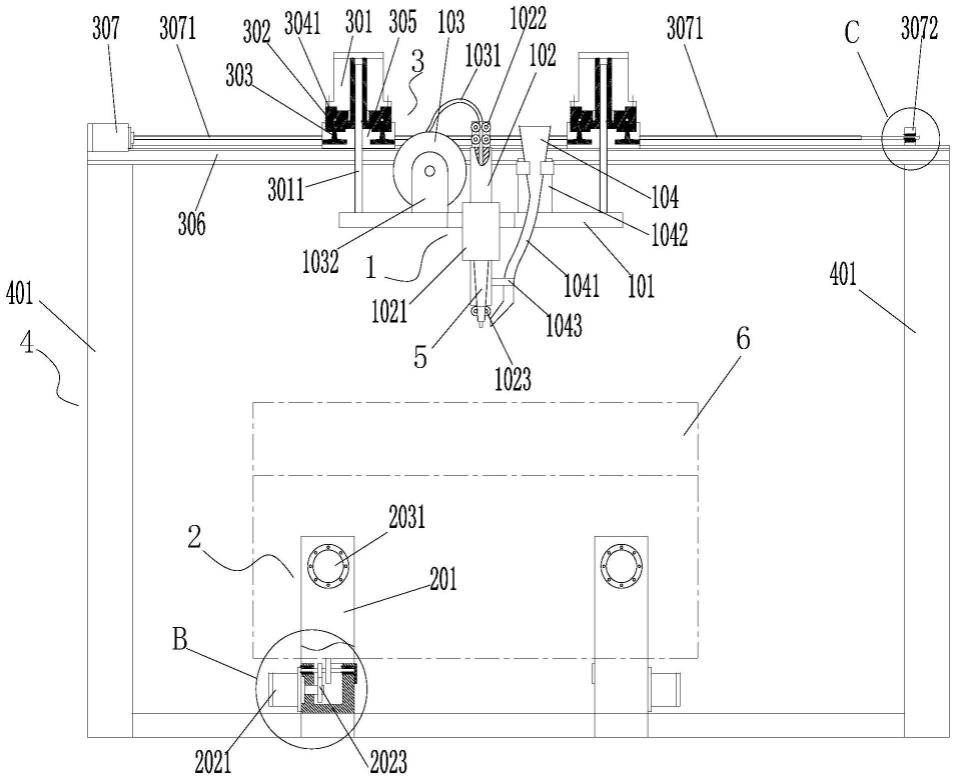
41.图1为本发明装备正视图(局部剖视);
42.图2为本发明装备侧视图(局部剖视);
43.图3为图2的a处放大图;
44.图4为图1的b处放大图;
45.图5为焊接组件正视图;
46.图6为焊接组件侧视图;
47.图7为图1的c处放大图;
48.图8为本发明的控制原理图。
具体实施方式
49.如图所示:本实施例的用于自卷钢管柱的自动埋弧焊装备,包括机架4、工件支撑组件2、焊接组件1和自动控制系统;
50.所述工件支撑组件2包括:
51.支撑座201,固定设置,一般固定设置于地面的基础,在此不再赘述;为了在结构上适应于工件6的外形,支撑座201整体上为u形结构,该u形结构在横向截面上的内侧面为上部开口的半圆弧形,用于对工件从下部形成包容,外侧面为上部开口的矩形或方形,底面和两侧的立面均为平面,利于形成稳定的支撑;
52.支撑滚轮组件,包括若干沿工件的圆周方向布置于所述支撑座并用于支撑工件的滚轮,若干所述滚轮可与工件外表面在圆周方向相切转动的设置,至少一个滚轮设有驱动其转动的动力,从而带动工件沿圆周方向转动;滚轮的转动轴线应平行于工件(焊接成形前的钢管柱)的轴线,滚轮的外圆相切支撑于工件外圆,从而形成支撑,同时滚轮被驱动转动时可带动工件转动;为增加摩擦力,滚轮的外圆应进行粗糙化处理,可采用硬橡胶等材料,在此不再赘述;
53.所述焊接组件1包括:
54.焊接件基座101,位于所述工件支撑组件2的上部,以可被驱动的沿横向、纵向和上下方向移动的方式设置于机架4;焊接件基座101用于安装埋弧焊的部件,比如焊丝、焊剂漏斗等;通过焊接件基座101横向、纵向和上下方向移动可针对不同的规格的工件6(钢管柱)进行位置的适应,从而实现通用性;横向指的是工件的横向,即水平面上的径向方向平行的方向,纵向指的是与工件的的轴线平行的方向,在此不再赘述;驱动焊接件基座横向、纵向和上下方向移动的方式可采用现有技术的机械驱动方式,比如电驱动或液压驱动的丝杠副、齿轮齿条副等,在此不再赘述;
55.焊丝输送件102,固定设置于所述焊接件基座101并设有将焊丝1031向下输送的焊丝通道,焊丝1031穿过所述焊丝通道并向下伸出;如图所示,焊丝输送件102为一通过固定座1021固定于焊接件基座101的空心柱,空心柱的空心即为焊丝通道,焊丝穿过焊丝通道形成规整的形状用于焊接;如图所示,位于焊丝输送件102的焊丝通道的焊丝1031进入端和输出端分别设有用于夹持焊丝的夹持滚轮组,夹持滚轮组至少包括一对相对设置的夹持滚轮,夹持滚轮外圆沿圆周方向形成内凹的滚道,该滚道的断面为弧形且径向尺寸小于焊丝的径向尺寸,从而使得相对的夹持滚轮能够对焊丝形成有效夹持,具有矫直焊丝的作用,特别是如图中所示,在焊丝进入端设置两对夹持滚轮1022,输出端设置一对夹持滚轮1023,进一步保证输送以及矫直效果;夹持滚轮通过夹持滚轮轴设置于固定在焊丝输送件端部的(进入端和输出端)的夹持滚轮座,在此不再赘述;为了保证对焊丝的充分接触夹持,还可对一对夹持滚轮中的一个施加朝向焊丝的预紧力,通过现有的机械结构即可实现,在此不再赘述;同时,为了保证焊丝的自动输出,还可对其中的一对夹持滚轮设置转动驱动力(较小的驱动电机即可),在此不再赘述;
56.焊剂输送件,固定设置于所述焊接件基座并具有一漏斗形储料腔104和位于漏斗形储料腔104底部的输料管1041,所述输料管1041的出口对应于焊丝1031 的向下伸出的焊接位置;如图所示,焊接件基座101上固定设有漏斗安装座 1042,漏斗安装座1042上固定设有开口卡环,漏斗形储料腔1041直接卡在开口卡环上,形成简单实用的安装结构;输料管
1041靠下还通过固定卡1043卡在焊丝输送件102上,形成稳固的连接,在此不再赘述;焊剂输送件设置漏斗形储料腔104,用于接收输送来的焊剂,一般采用设定量的连续输送机构,比如皮带输送并落入漏斗等方式,在此不再赘述;
57.所述自动控制系统包括:
58.焊缝位置检测单元,用于检测工件的焊缝所在位置;焊缝位置检测单元可在工件就位后扫描以获得焊缝位置,可以是红外检测、超声波检测等等现有技术存在的检测手段均可;
59.中央处理单元,接收焊缝位置检测单元的焊缝位置信息,发出驱动焊接件基座移动的命令,带动所述焊丝输送件到达焊接位置完成焊接;
60.中央处理单元指的是一般的控制器(cpu加上外围电路),应具有存储功能,一般的单片机即可实现,当然,也可采用配置较高的工业控制机,在此不再赘述。
61.本实施例中,所述滚轮包括驱动滚轮202和支撑滚轮203,所述驱动滚轮202 和支撑滚轮203分布位置在高度上不超出工件6中心轴线,且驱动滚轮202和支撑滚轮203用于支撑工件的直径范围可调;当驱动滚轮202和支撑滚轮203 的位置可调整时,则可形成对不同直径的工件进行全方位接触支撑,保证在驱动转动时以及支撑的稳定性,从而保证焊接质量;驱动滚轮和支撑滚轮的位置的调整可通过现有的机械调整结构,比如安装座采用可移动并可锁定的结构,从而实现调整,在此不再赘述。
62.本实施例中,所述驱动滚轮202设有滚轮驱动组件,所述滚轮驱动组件具有一转动动力输出端并用于驱动驱动滚轮转动,从而带动工件绕其中心轴线转动;滚轮驱动组件一般采用电机,以实现驱动转动,在此不再赘述。
63.本实施例中,所述驱动滚轮202为一个且与工件圆周方向最低点相对应向上支撑工件6,即驱动滚轮位于最低点,对于不同的直径的工件来说,支撑最低点可以不变,变化的仅仅是高度方向;所述支撑滚轮203至少为两个且其中两个支撑滚轮的转动轴线与最小直径的工件的中心轴线平齐布置于工件的径向两侧;且支撑滚轮203的横向位置可调使得驱动滚轮和支撑滚轮用于支撑工件的直径范围可调;
64.本实施例中,仅通过调整支撑滚轮203在横向的位置,可以适应不同直径的尺寸范围,对于不同尺寸的工件来说,放置于本实施例的工件支撑组件后,依然能够全面的与滚轮接触,仅仅在高度上具有变化,通过操作焊接件的高度即可完成焊接,整体上通用性较强。
65.本实施例中,所述支撑滚轮203为两个,两个支撑滚轮203的转动轴线与最小直径的工件6的中心轴线平齐布置于工件的径向两侧;在最小直径的工件来说,两侧的支撑点在横向尺寸最大处,而大于该直径的工件来说,支撑点位于横向尺寸最大处以下,具有较大的适应范围;同时,采用支撑滚轮的结构,利用工件本身的重力还利于纵焊缝的合拢,方便焊接;最小直径的工件指的是在本发明上进行焊接的工件中直径为最小的,在此不再赘述;
66.所述支撑滚轮203设有支撑轮调节驱动装置,包括支撑滚轮安装座2032、支撑位置调节电机2031和支撑位置调节丝杆2033,所述支撑滚轮203可转动的设置于支撑滚轮安装座2032,所述支撑位置调节电机2031为空心转子电机且安装于支撑座201,与支撑位置调节电机2031的转子传动配合设有支撑位置调节螺母,所述支撑位置调节丝杆2033沿横向设置且一端固定于支撑滚轮安装座2032,另一端螺纹配合穿过支撑位置调节螺母螺纹配合以及穿入支撑位置调节电机2031的空心转子;当然,形成上述结构,则支撑位置调节电机固定安
装于支撑座(支撑座为u形结构)横向的外侧,而支撑滚轮203用于支撑工件6 而位于内侧,支撑位置调节丝杆则穿过所述支撑座,在此不再赘述;支撑滚轮安装座则为u形开口槽结构,支撑滚轮通过支撑滚轮轴安装在u形开口槽内形成转动配合,在此不再赘述;
67.如图所示,为保证支撑滚轮的支撑强度,每个支撑滚轮203上位于支撑位置调节丝杆2033的上下两侧还分别设有导向杆2034,所述导向杆2034一端固定于支撑滚轮安装座,另一端可滑动的穿入支撑座201设置的导向孔或者固定设置的导向套内形成导向配合,并增强对支撑滚轮203的支撑。
68.本实施例中,所述滚轮驱动组件包括滚轮驱动电机2021和滚轮传动副2023,滚轮驱动电机2021通过滚轮传动副2023驱动所述驱动滚轮202;如图所示,支撑座201的内侧最低点开设驱动滚轮安装槽2011,所述驱动滚轮202通过驱动滚轮轴2022转动配合设置于驱动滚轮安装槽2011内;滚轮驱动电机2021 固定于支撑座且动力输出轴伸入驱动滚轮安装槽2011内并通过滚轮传动副 2023将动力传递至驱动滚轮轴2022从而带动驱动滚轮转动,并利用驱动滚轮的转动以及驱动滚轮与工件外表面之间的摩擦力带动工件转动,使得纵焊缝至设定的位置,以及并在焊接环焊缝时持续焊接,不需人工转动;滚轮传动副2023 可以为现有技术能够实现传动的任何传动副,比如链传动、皮带传动或者齿轮传动,本实施例为齿轮传动副,包括传动配合设置于动力输出轴(与电机转子传动配合)的主动齿轮和与主动齿轮啮合且传动配合设置于驱动滚轮轴的从动齿轮,在此不再赘述。
69.本实施例中,所述支撑座201包括至少两个且沿工件轴向并列布置,每个支撑座201上均设有所述支撑滚轮组件;本实施例采用两个支撑座在工件的长度方向上并列设置,利用支撑滚轮组件对工件形成支撑;支撑滚轮组件则与前述结构相一致,在此不再赘述;当然,两个支撑座201的内侧均对工件形成底部的部分包容,形成较为稳定的均衡的支撑,在此不再赘述
70.本实施例中,还包括用于驱动所述焊接件基座沿横向、纵向和上下方向移动的方位驱动系统3,所述方位驱动系统3包括上下驱动组件、横向驱动组件和纵向驱动组件;
71.所述上下驱动组件包括上下驱动电机301和由上下驱动电机301驱动的上下移动的上下移动丝杆3011,所述上下驱动电机301为空心转子电机,与上下驱动电机301的转子传动配合设有上下驱动螺母,所述上下移动丝杆3011沿竖直方向设置且一端向下延伸固定于焊接件基座101,用于带动焊接件基座101上下移动,以适应不同工件的焊缝的高度;另一端螺纹配合穿过上下驱动螺母以及穿入上下驱动电机301的空心转子的内部空间,形成利用丝杆副的上下移动驱动机构;
72.所述横向驱动组件包括横向驱动电机304、横向驱动丝杆3041和横梁303,所述横向驱动电机304固定设置于横梁303的一端,所述上下驱动电机301以可单自由度往复横向移动的方式设置于所述横梁303,如图所示,单自由度往复横向移动的方式利用燕尾槽和燕尾式导轨配合而成,在此不再赘述;所述横向驱动丝杆3041用于与上下驱动电机301形成驱动配合且被所述横向驱动电机 304驱动转动,从而带动所述上下驱动电机沿横梁移动;当然,横向驱动电机 304固定设置于横梁303的一端指的是设置方位,而并不必然固定于横梁,能够固定设置并能驱动横向驱动丝杆转动带动上下驱动电机即可,在此不再赘述;横向驱动丝杆303用于驱动上下驱动电机301的方式为上下驱动电机设有相应的内螺纹,即可以为固定连接设有螺母、设置有带有螺纹的电机座等,在此不再赘述;
73.所述纵向驱动组件包括纵向驱动电机307、纵向驱动丝杆3071和固定于机架4的纵梁306,所述横梁303以可单自由度往复纵向移动的方式设置于所述纵梁306;所述纵向驱动电机307固定于纵梁306并驱动所述纵向驱动丝杆3071 转动并通过所述纵向驱动丝杆3071驱动所述横梁303沿所述纵梁306单自由度往复纵向移动;纵向驱动电机307固定于纵梁306仅指设置方位且相对于纵梁固定,可以是通过其他部件直接固定于纵梁,也可以是固定于其他部件(比如机架)而相对于纵梁固定,通过纵向驱动丝杆3071驱动横梁303,则横梁需要设有与纵向驱动丝杆相配合的螺母、内螺纹或者其他设有螺纹并固定连接于横梁的部件,在此不再赘述;
74.由此,本发明中,利用上下驱动电机301驱动焊接件基座上下移动,利用横向驱动电机304驱动上下驱动电机和焊接件基座共同横向移动,达到带动焊接组件横向移动的目的,同理,纵向驱动电机307带动焊接组件纵向移动,从而实现在空间坐标系中的三维移动,结合支撑滚轮组件的运行,能够适应于工件的较大范围的尺寸变化以及焊缝的方位。
75.本实施例中,所述上下驱动电机301为两个沿纵向对应于焊接件基座101 的两端并列设置,所述上下移动丝杆3011对应的为两个,采用两个上下驱动电机301以及上下移动丝杆3011驱动焊接件基座101,易于保持平衡,从而稳定的上下移动;当然,与每个上下驱动电机301相对应设置两个并列的所述横梁 303,所述上下驱动电机301下部固定设有上下驱动电机座302,所述驱动电机座302以可单自由度往复横向移动的方式担在两个所述横梁303,所述横向驱动丝杆3041螺纹配合穿过所述上下驱动电机座302,且每个上下驱动电机座302 配合两个分列上下移动丝杆3011的两侧的所述横向驱动丝杆3041;
76.所述纵梁306为两根且分别对应于横梁303的两端设置,与每个上下驱动电机座302所对应的两个所述横梁303的两端分别固定设有一纵向滑梁305形成矩形框架结构,所述矩形框架结构通过两个所述纵向滑梁305单自由度往复纵向移动设置于对应的所述纵梁306,同理,采用燕尾滑槽和燕尾滑轨的方式形成配合,属于现有技术的单自由度往复滑动配合方式,在此不再赘述;即如图所示,每个上下驱动电机座302对应设置两个横梁303,两个横梁303的同一端部共同固定于同一纵向滑梁305,组成稳定的框架结构;同时,本结构中通过两根纵梁306支撑横梁303,形成较为稳定的支撑;由此,每个上下驱动电机座302对应采用一个矩形框架结构将两个横梁固定,从而使得结构更为稳定,利于保证最终的焊接质量;如图所示,机架4由四根立柱401组成,两根纵梁 306分别固定于沿纵向排列的两列立柱401之间,当然,为了保证稳定性,立柱下部固定于地面,且横向并列的立柱401之间还可设置横梁,以保证整体的机架形成稳定的框架;当然,纵向的两列立柱之间的距离应该足够焊接组件纵向移动完成工件纵焊缝的完全焊接,在此不再赘述;
77.所述纵向驱动电机307为两个分别对应固定于对应的所述纵梁306的一端,同理,所述纵向驱动丝杆3071为两个且分别螺纹配合顺序穿过两个上下驱动电机座302所对应的矩形框架结构同侧的纵向滑梁305,整体传动结构较为稳定,利于保证焊接质量;如图7所示,纵向驱动丝杆3071在长度上基本贯穿整个纵梁,因此,位于末端设有纵梁转座3072,并转动配合支撑在纵梁转座3072上,形成稳定的转动支撑。
78.本实施例中,所述焊接组件1还包括转动设置于焊接件基座的焊丝盘103,所述焊丝1031缠绕在所述焊丝盘103并将焊丝输送至焊丝输送件102的焊丝通道;焊丝盘103指的是用于缠绕焊丝的卷盘,通过盘座设置于焊接件基座,属于现有技术的结构,在此不再赘
述;
79.所述焊缝位置检测单元为固定于焊丝输送件的焊缝检测探头5,所述焊缝检测探头5的探测端部对应于焊丝的焊接位置;一般采用红外探测结构或者视频探测,本实施例为红外探测头;
80.所述自动控制系统还包括输入输出单元,所述输入输出单元用于向中央处理单元输入工件参数以及命令信息,并输出工作状态信息;本实施例中,输入输出单元可为具有输入功能和显示功能的触摸屏,也可以是利用键盘输入而通过显示屏输出的结构,在此不再赘述;
81.使用时,利用输入输出单元输入工件参数(包括直径和长度等)以及开始焊接或停止焊接(可以设为自动执行)的命令等;
82.所述中央处理单元根据焊缝检测探头的探测信息和输入输出单元的工件参数以及命令信息,发出下列命令信息:
83.向支撑轮调节驱动装置发送命令以调整两个支撑滚轮的位置用于支撑不同管径的工件;即根据工件参数,向支撑位置调节电机发送命令,驱动支撑滚轮至与工件直径相对应的位置,并将工件置于支撑滚轮组件;
84.向滚轮驱动组件发送命令带动工件旋转,使得纵向焊缝位于焊接位置,即向滚轮驱动电机发出驱动命令,驱动驱动滚轮转动利用摩擦力带动工件转动,同时,焊缝检测探头检测检测纵向焊缝到达设定位置后并向中央处理单元发送信息,中央处理单元向滚轮驱动电机发出停止命令;
85.向方位驱动系统发出命令信息,带动焊接件基座运动使焊丝位于焊接位置;即工件就位后,根据工件参数信息驱动上下驱动电机、横向驱动电机和纵向驱动电机移动至焊接位置;当然,在发出命令并使得上述电机运行的同时,上述各种电机还会向中央处理单元反馈运动的位置信息,在此不再赘述;
86.在焊接工序中,驱动纵向驱动电机带动焊接组件纵向移动,完成纵向焊缝的焊接,通过滚轮驱动电机驱动驱动滚轮转动旋转工件,完成环向焊缝的焊接。
87.本发明中,转动配合一般在转动副内设置轴承,为减小体积一般为滚针轴承或者自润滑滑动轴承,在此不再赘述;而单自由度往复滑动配合的结构则采用现有的燕尾滑槽和燕尾滑轨相配合的结构,在此不再赘述。
88.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1