具有双运动基片承载件的系统的制作方法
1.本公开总体上涉及基片处理领域,例如基片的薄膜涂覆。
背景技术:
2.基片的真空处理在本领域中是众所周知的,并且有时被称为薄膜处理。通常,薄膜处理系统可在以下三种架构中的一种下进行划分:批量处理、集群系统和在线系统。这些架构中的每一种的优点和缺点在本领域中是众所周知的。
3.在一些系统架构中,尤其是在那些用于制造微芯片的系统架构中,基片单独输送到处理腔室中,并放置在卡盘或基座上。相反,在其他系统中,例如在那些用于硬盘驱动器或太阳能电池制造的系统中,基片在被定位在基片承载件上的同时被输送和处理。
4.本领域需要改进的系统架构,其可用于在不同类型的基片上形成薄膜。此外,在本领域中需要能够以高产量和商业上可接受的成本形成薄膜涂层的机械。
技术实现要素:
5.包括对于公开内容的以下概述以提供对于本发明的一些方面和特征的基本理解。该概述并不是对本发明的广泛概述,并且照这样,它并不旨在具体确定本发明的关键的或必不可少的元件或描绘本发明的范围。其唯一目的是以简化形式呈现本发明的一些概念,作为下面呈现的更为详细描述的说明。
6.所公开的实施例提供了一种系统,该系统被专门设计成批量制造并以可接受的商业成本形成改进的薄膜涂层。
7.在所公开的实施例中,真空外壳具有与其附接的多个处理腔室。在处理期间,承载件在真空外壳内同时移动以由处理腔室进行处理。装载锁定站(loadlock)区段被附接到真空外壳并且可以具有加载侧和卸载侧,该加载侧和卸载侧可以共享或具有独立的真空环境。闸阀将装载锁定站区段与真空外壳分隔开。轨道交换器被定位在真空外壳内。轨道交换器可在第一位置和第二位置之间移动,在第一位置中,承载件在真空外壳内连续移动,在第二位置中,使得承载件在真空外壳和装载锁定站区段之间移动。
8.根据一般方面,提供了一种处理系统,包括:真空外壳,其具有多个处理窗口并且其中定位有连续轨道;多个处理腔室,其附接到真空外壳的侧壁,每个处理腔室对应其中一个处理窗口;装载锁定站,其被附接于真空外壳的一端并在其中定位有加载轨道;至少一个闸阀,其将装载锁定站与真空外壳分隔开;多个基片承载件,其被配置成在连续轨道和加载轨道上行进;至少一个轨道交换器,其被定位在真空外壳内,轨道交换器可在第一位置和第二位置之间移动,在第一位置中,使得基片承载件在连续轨道上连续地移动,在第二位置中,使得基片承载件在连续轨道和加载轨道之间转移。
9.在其他方面中,提供了一种基片处理系统,包括:
10.装载锁定站区段,其具有第一侧和与第一侧相反的第二侧;
11.大气区段,其被耦接到装载锁定站区段的第一侧;
12.真空区段,其被附接到装载锁定站区段的第二侧并且其上附接有多个处理腔室;
13.承载件输送机构,包括:
14.i.单轨,其被形成为:第一单轨区段,其被成形为跑道并被定位在真空区段内;第二单轨区段,其具有两个平行的直线单轨,这些直线单轨被定位在装载锁定站区段内并具有延伸到大气区段和真空区段中的延伸部;以及第三单轨区段,其被定位在大气区段中并被成形为曲线,该曲线的一端与直线单轨中的一个的延伸部相交会,另一端与直线单轨中的另一个的延伸部相交会,
15.ii.被定位于跑道的动力元件,
16.iii.被沿着第二单轨区段定位的多个电动轮,
17.iv.两个轨道交换器,其被定位于第一单轨区段的一端,每个轨道交换器包括可移动工作台、被定位在该工作台上的直单轨区段和被定位在该工作台上的弯曲单轨区段,以及
18.多个承载件,其具有多个轮子并被配置成接合单轨,以使承载件跨骑在该单轨上。
19.在一个实施例中,该系统由下列构成:具有第一侧和与第一侧相反的第二侧的装载锁定站区段;大气区段,其被附接于装载锁定站区段的第一侧;真空区段,其被附接于装载锁定站区段的第二侧并且其上附接有多个处理腔室;承载件输送机构,包括:
20.i.单轨,其被形成为:第一单轨区段,其被成形为跑道并被定位于真空区段内;第二单轨区段,其具有两个平行的直线单轨,这些直线单轨被定位在装载锁定站区段内并具有延伸到大气区段和真空区段中的延伸部;以及第三单轨区段,其被定位在大气区段中并被成形为曲线,该曲线的一端与直线单轨中的一个的延伸部相交会,另一端与直线单轨中的另一个的延伸部相交会,
21.ii.环形带,其被定位于跑道并且其上附接有多个驱动叉,
22.iii.驱动轮,其被定位于大气区段中并且其上附接有多个驱动叉,iv.被沿着第二单轨区段定位的多个电动轮,
23.v.两个轨道交换器,其被定位于第一单轨区段的一端,每个轨道交换器包括可移动的工作台、被定位于工作台上的直线单轨区段和被定位于工作台上的弯曲单轨区段,以及
24.多个承载件,每个承载件具有:基座;多个轮子,其附接于基座并被配置成接合单轨以使承载件自由地跨骑在单轨上;附接于基座的驱动杆,该驱动杆被配置成接合多个电动轮,以使承载件在跨骑在第二单轨区段上的同时移动;以及驱动销,其被附接于基座并被配置成接合驱动叉,以使承载件在处于第一或第三单轨区段中的同时移动;并且其中,当轨道交换器处于第一位置中时,弯曲单轨区段与第一单轨区段对齐,从而致使承载件由驱动叉沿着第一单轨区段连续地移动,并且当轨道交换器处于第二位置中时,直线单轨区段将第一单轨区段连接到第二单轨区段,从而致使在装载锁定站区段和真空区段之间交换承载件。
附图说明
25.本发明的其他方面和特征将从参考以下附图进行的详细描述中变得明显。应当理解,详细描述和附图提供了本发明的各种实施例的多种非限制性示例,其由所附权利要求
限定。
26.结合在本专利说明书中并构成本专利说明书的一部分的附图例示了本发明的实施例,并且与说明书一起用于解释和说明本发明的原理。附图旨在以图解的方式图示出示例性实施例的主要特征。附图并非旨在描绘实际实施例的每个特征或所描绘元件的相对尺寸,并且并未按比例绘制。
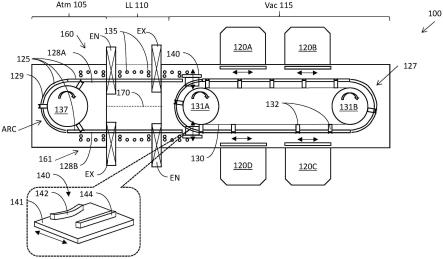
27.图1、图1a和图1b图示了用于使用双运动承载件形成薄膜涂层的模块化系统的实施例。
28.图2a图示了双运动基片承载件的一个实施例,而图2b图示了用于圆形基片的基片保持器。
具体实施方式
29.现在将参考附图描述本发明的用于制造薄膜涂层的系统及其双运动基片承载件的实施例。不同的实施例或它们的组合可用于不同的应用或实现不同的益处。根据寻求实现的结果,本文中公开的不同特征可以被部分地或完全地、单独地或与其他特征组合使用,从而平衡优势与要求和约束。因此,将参考不同的实施例强调某些益处,但并不限于所公开的实施例。即,本文公开的特征不限于描述它们的实施例,而是可以与其他特征“混合和匹配”并且被结合到其他实施例中。
30.所公开的实施例提供了一种系统架构和一种机构,该系统架构能够使用第一承载件运动模式在真空腔室内连续处理基片,该机构用于使用第二承载件运动模式将承载件输送出该真空腔室。在任一承载件运动模式中,承载件自由地跨骑在轨道上,但是施加到承载件以使其跨骑在轨道上的动力在承载件运动模式中的每一种模式中是不同的。尽管在真空腔室内,所有的承载件都被同时移动,但是当离开该真空腔室时,承载件可以被单独移动。
31.现在将参考图1并结合图2a和图2b来描述第一实施例。图1图示了该系统的俯视示意图,而图2a图示了承载件并且图2b图示了用于图2a的承载件的替换基片保持器。
32.在图1中,系统100由大气区段105、装载锁定站区段110和真空区段115构成。承载件在大气区段105中进行加载和卸载,并在大气区段105和真空区段115之间经由装载锁定站区段110传递。在真空区段115内对基片进行处理。在该示例中,示出了四个处理腔室120a-120d,但是可以设置任意数量的处理腔室,如下文将进一步示出的那样。处理腔室120a-120d中的每一个可以是蚀刻腔室、溅射腔室、离子植入腔室等。如所示,在该实施例中,处理腔室被连接到共同真空氛围,它们之间没有闸阀。
33.单轨节段125被设置成三个区段105、110和115,使得基片承载件能够横穿所有三个区段。单轨节段在真空区段内形成跑道单轨127,形成横穿装载锁定站区段并部分地延伸到大气区段且部分地延伸到真空区段中的直线轨道128a和128b,并在大气区段中形成弯曲的新月形旋转轨道129。环形带130设置在真空区段115内的旋转滚筒131a和131b上,环形带130上附接有多个动力叉132。多个通电轮子135设置在直线轨道的旁边,并且在大气区段中设置有具有动力叉132的旋转轮137。
34.两个轨道交换器140设置在真空区段内,其放大图在插图中提供。轨道交换器包括工作台141,其上设置有两个轨道节段——弯曲轨道节段142和直轨道节段144。如由图1中的双向箭头所示,轨道交换器可移动到两个位置中的一个。在一个位置中,弯曲轨道节段完
成跑道127,使得真空区段内的承载件沿着跑道连续移动以通过腔室120a-120d连续地处理基片。当在真空腔室内完成对基片的处理时,轨道交换器被移动到第二位置,其中,直线轨道在直线轨道128a和128b与跑道127的直线节段之间形成连接,使得真空腔室内的承载件退出到装载锁定站,而装载锁定站内的承载件进入真空区段。
35.基片承载件150的实施例在图2a中示出。在该实施例中,承载件150具有基座152和基片保持器154。基片保持器154可从基座卸下以便能够处理不同形状和数量的基片。例如,图2a中所示的保持器154将正方形或矩形基片保持在三个高度中,而图2b中所示的保持器154’保持圆形基片。
36.如图2a中所示,基座152包括与单轨125接合并跨骑在该单轨125上的滚轮装置153。该滚轮装置并不是电动的并且可以包括多个自由旋转的轮子,使得基座可以自由地跨骑在该单轨上。动力来自于与驱动杆156接合的轮子135或与驱动销158接合的叉132中的一个。
37.现在将描述在系统100中执行的过程的示例。空的承载件被驱动到加载站160并且基片被加载到承载件上,在那里,滚轮装置153与直线轨道1a接合并且电动轮135与驱动杆156接合。新的基片被加载到基片保持器154上。同时,经处理的基片可被从位于卸载站161处的另一承载件移除。一旦完成加载和卸载,加载区段160中的装载锁定站的入口闸阀en就被打开。可选择地,卸载区段161的装载锁定站的出口闸阀ex被打开。加载用装载锁定站的出口闸阀ex保持关闭。此外,如果卸载区段的出口闸阀被打开,则其入口闸阀被关闭。在一些实施例中,两个装载锁定站是独立的,如由虚线的间隔件170所例示的那样,使得每个加载所均可以彼此无关地维持真空。在这种情况下,当新的承载件被加载到加载用装载锁定站中时,经处理的承载件可被从真空区段加载到卸载用装载锁定站161中。注意,入口闸阀和出口闸阀被相对于承载件行进方向标识出,尽管入口闸阀和出口闸阀的结构是相同的。也就是说,如果行进方向将会被翻转,入口闸阀和出口闸阀的指定也将被翻转。
38.在这种情况下,电动轮135被通电,使得加载站中的承载件被转移到相应的装载锁定站,而另一装载锁定站内的承载件可被移动到大气区段105和/或经处理的承载件可被移动到卸载装载锁定站中。然而,请注意,同时执行这些操作并不是强制性的。作为选择,加载可以在时间上单独进行,使得只有带有新的基片的承载件的入口阀被打开并且该承载件被移动到装载锁定站中,而卸载区段中的电动轮并未通电。即,直线轨道区段中的电动轮可被单独或成组地通电,使得仅电动轮的一个子组被通电。此外,当装载锁定站是独立的,即,具有独立的专用泵送装置时,各个闸阀也可被单独通电,使得加载和卸载无需同步。当然,为了操作效率,同步操作是有好处的。
39.在装载锁定站维持共同真空氛围并且被共同泵送的实施例中,例如,当没有间隔件170时,闸阀同步操作。例如,加载用装载锁定站的闸阀en将会与卸载用装载锁定站的ex闸阀一起操作,并且加载用装载锁定站的ex闸阀将会与卸载用装载锁定站的en闸阀一起操作。
40.当承载件进入该装载锁定站时,入口闸阀被关闭并抽真空。如果经处理的承载件已经从出口装载锁定站中取出,那么它也被泵送到真空状况。当已经达到适当的真空度时,加载用装载锁定站的出口闸阀ex被打开,并且适当的电动轮被通电以将承载件移动到真空区段115中。此时,轨道交换器140被移动到呈现出直线轨道区段144与跑道单轨127的直线
区段对齐的位置。因此,当轮子被通电以将承载件移动到真空区段中时,承载件进入跑道回路,并且动力叉中的一个接合驱动销158。然后轨道交换器140被移动以呈现弯曲轨道区段142与跑道单轨127的直线区段对齐的位置。在该位置中,承载件由环形带130移动,而非由电动轮135移动。此外,在这种情况下,随着环形带旋转,承载件将会沿着跑道行进与所需一样多的回路,直到它准备好退出处理区段为止。因此,承载件上的基片可以由每个腔室120a-120d反复处理与所需一样多的次数。
41.当处理完成时,卸载区段的轨道交换器140被移动以呈现直线轨道区段144与跑道单轨127的直线区段对齐的位置。随着环形带继续旋转,承载件被移动到轨道交换器中并与动力叉脱离,同时驱动杆156与电动轮135接合。电动轮然后可被通电以将承载件驱动出跑道回路。
42.如可见,在所述实施例中,承载件具有两种动力模式,接合直线轨道上的电动轮,同时接合跑道和大气返回回路arc中的动力叉。在跑道上,叉被附接于环形带,而在大气返回回路中,叉被附接于驱动轮。此外,轨道交换器用于将承载件引入/移出跑道。在一个位置中,轨道交换器能够围绕跑道不断地驱动该承载件,而在其第二位置中,它能够将承载件引入或移出跑道。
43.如前所述,该系统可改型以包括与所需一样多的处理腔室。示例示于图1a中。图1a中所示的示例与图1中所示的示例相似,并且相似的元件由相同的附图标记指示。主要区别在于该示例的系统包括六个处理腔室,120a-120f。否则,所有元件都会与图1中的元件相同,这图示了该架构的多功能性。
44.图1b提供了具有六个处理腔室的实施例的外部视图,在该透视图中可以看到处理腔室120a-120c。同样,该系统由三个区段构成:大气区段105、装载锁定站110和真空区段115,该真空区段115包括真空外壳163,处理腔室附接到该真空外壳163上。在图示中,服务访问窗口166、167和168被示出为是打开的,以实现真空外壳的内部的可视化。例如,可以分别从服务访问窗口166和168看到旋转鼓131a和131b。跑道单轨127和环形带130的多个部分是通过服务访问窗口167可见的。
45.在该示例中,腔室120b被示出为处于打开位置,从而经由处理窗口172轻松访问处理腔室和真空外壳的内部。具体而言,在该示例中,处理腔室120a-120c被经由可旋转铰链170(从图1b中的视图中看不清,但在图1a中示出)附接到真空外壳163。当腔室120b在其铰链上旋转时,它暴露出真空外壳163的内部,其中,示出了具有四个基片的承载件150。
46.迄今为止公开的架构提供了一种基片处理系统,该基片处理系统具有大气区段105;装载锁定站区段110;以及真空区段115,其上附接有多个处理腔室120。承载件输送机构包括单轨、环形带130、驱动轮137、多个电动轮135和两个轨道交换器140,该单轨被形成为:第一单轨区段127,其被成形为跑道并被定位在真空区段内;第二单轨区段,其具有两个平行的直线单轨128a和128b,这两条直线单轨被定位在装载锁定站区段内并具有延伸到大气区段中和真空区段中的延伸部;以及第三弯曲单轨区段,其呈月牙形旋转轨道129的形式,被定位在大气区段中并且一端与直线单轨中的一条的延伸部相交,另一端与直线单轨中的另一条的延伸部相交,环形带130位于跑道并附接有多个驱动叉132,驱动轮137位于大气区段中并附接有多个驱动叉132,多个电动轮135被沿着第二单轨区段定位,两个轨道交换器140位于第一单轨区段的一端,每个轨道交换器140具有可移动的工作台141、定位在工
作台上的直线单轨区段144和定位在工作台上的弯曲单轨区段142。
47.多个承载件支撑待处理的基片,每个承载件具有:基座152;多个自由旋转轮153,其附接到基座并被配置成接合单轨以使承载件自由地跨骑在该单轨上;驱动杆156,其被附接于基座,该驱动杆被配置成接合多个电动轮135,以使该承载件在跨骑在第二单轨区段上的同时移动;以及驱动销158,其被附接与基座并被配置成接合驱动叉132,以使该承载件在处于第一单轨区段或第三单轨区段中的同时移动。
48.当轨道交换器处于第一位置中时,弯曲单轨驱动与第一单轨区段对齐,从而致使承载件由驱动叉沿着第一单轨区段连续地移动,并且当轨道交换器处于第二位置中时,直线单轨区段将第一单轨区段连接到第二单轨区段,从而在装载锁定站区段和真空区段之间交换该承载件。
49.在所公开的处理系统中处理基片的方法可以包括以下步骤:将基片加载到承载件上;将承载件通过输送轨道输送到装载锁定站中;在该装载锁定站内抽送真空;将输送轨道上的承载件输送到处理外壳中,该处理外壳附接有多个处理腔室;操作轨道交换器以呈现第一位置,从而在输送轨道和处理轨道之间形成连接,并且使承载件在轨道交换器上移动,并随后移动到处理外壳内的处理轨道;操作轨道交换器以呈现第二位置,从而将处理轨道与输送轨道分离开;在为处理腔室通电的同时,使承载件在处理轨道上连续移动;并且,当完成处理时,操作轨道交换器以呈现第一位置并将承载件从处理轨道输送到输送轨道上。使承载件连续移动可以包括例如通过将多个承载件耦接到环形带而使多个承载件同时连续移动。
50.这里描述的过程和技术与任何特定设备并不固有相关,并且可以通过任何适用的部件组合来实现。此外,可以根据这里描述的教导使用多种类型的通用装置。已经关于特定示例描述了本发明,这些示例在所有方面都意在是说明性的而非限制性的。本领域技术人员将理解,许多不同的组合都将适用于实践本发明。
51.此外,考虑到本文公开的本发明的专利说明书和实践,本发明的其他实施方案对于本领域技术人员来说都将是显而易见的。所描述的实施例的各个方面和/或部件都可以被单独使用或以任何组合使用。目的是,本专利说明书和实施例仅被视为是示例性的,本发明的真正范围和精神由由以下权利要求指示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1