芯片打磨系统的制作方法
1.本发明涉及一种芯片打磨系统。
背景技术:
2.在现有技术中,为了调整芯片的一些参数值,例如,芯片的电阻值,有时需要对芯片进行打磨和抛光处理。在打磨的过程,通过去除芯片上的部分材料来调整芯片的参数值,例如,芯片的电阻值,使得被打磨后的芯片的参数值等于预定值。
3.但是,芯片通常非常小,有时芯片上还连接有柔软的导线,因此,夹持芯片、控制抛光量和形状是一项挑战。目前,此工作通常由人工操作员手动完成,但是手工打磨的效率低,而且打磨质量差。
技术实现要素:
4.本发明的目的旨在解决现有技术中存在的上述问题和缺陷的至少一个方面。
5.根据本发明的一个方面,提供一种芯片打磨系统,包括:托盘,用于装载待打磨的芯片;打磨装置,用于对装载在所述托盘上的芯片进行打磨;检测装置,用于实时检测当前被打磨的芯片的参数值;和控制装置,适于根据检测到的所述参数值控制所述打磨装置对所述芯片的打磨量,使得打磨好的芯片的所述参数值等于预定值。
6.根据本发明的一个实例性的实施例,所述检测装置用于实时检测当前被打磨的芯片的电阻值,以使得打磨好的芯片的电阻值等于预定电阻值。
7.根据本发明的另一个实例性的实施例,在所述芯片上连接有两条导线,在所述托盘上设置有夹具,所述夹具适于同时夹持和固定所述芯片和所述两条导线。
8.根据本发明的另一个实例性的实施例,所述检测装置与被打磨的芯片上的两条导线电连接,以检测被打磨的芯片的所述参数值。
9.根据本发明的另一个实例性的实施例,所述打磨装置包括打磨头和驱动所述打磨头旋转的驱动器;所述控制装置根据检测到的所述参数值控制被打磨的芯片向所述打磨头的进给量,以控制所述打磨头对所述芯片的打磨量。
10.根据本发明的另一个实例性的实施例,在所述打磨头上形成有围绕其旋转轴线的环形沟槽,所述环形沟槽的内表面用于接触和打磨所述芯片的端部。
11.根据本发明的另一个实例性的实施例,所述环形沟槽的内表面的截面轮廓呈预定的曲线状,以使打磨好的芯片的端部呈预定形状。
12.根据本发明的另一个实例性的实施例,所述芯片打磨系统还包括托盘移动装置,所述托盘移动装置能够将所述托盘从芯片装载工位移动到芯片打磨工位、从芯片打磨工位移动到芯片卸载工位和从芯片卸载工位移动到芯片装载工位。
13.根据本发明的另一个实例性的实施例,当所述托盘被移动所述芯片装载工位时,所述芯片被装载到所述托盘上;当所述托盘被移动所述芯片打磨工位时,所述打磨装置对所述托盘上的芯片进行打磨;当所述托盘被移动所述芯片卸载工位时,打磨好的芯片被从
所述托盘上卸下。
14.根据本发明的另一个实例性的实施例,所述芯片打磨系统还包括设置在芯片装载工位的装载机器人,所述装载机器人用于将所述芯片装载到所述托盘上。
15.根据本发明的另一个实例性的实施例,所述芯片打磨系统还包括设置在芯片卸载工位的卸载机器人,所述卸载机器人用于将所述芯片从所述托盘上卸下。
16.根据本发明的另一个实例性的实施例,在打磨所述芯片之前,所述控制装置通过控制所述托盘移动装置将所述芯片移动到预定的打磨位置。
17.根据本发明的另一个实例性的实施例,所述芯片打磨系统还包括:摄像机和计算装置。摄像机用于拍摄被移动到所述芯片打磨工位的托盘上的芯片的图像;计算装置用于根据拍摄到的所述图像计算出所述芯片的实际位置;所述控制装置根据计算出的实际位置和预定的打磨位置之间的差值来控制所述芯片的位置,以将所述芯片移动到预定的打磨位置。
18.根据本发明的另一个实例性的实施例,在打磨所述芯片时,所述控制装置通过控制所述托盘移动装置来控制被打磨的芯片向所述打磨头的进给量。
19.根据本发明的另一个实例性的实施例,在打磨所述芯片时,所述控制装置根据检测到的所述参数值与预定的参数值之间的差值来控制被打磨的芯片向所述打磨头的进给量,以使得打磨好的芯片的所述参数值等于预定值。
20.根据本发明的另一个实例性的实施例,所述芯片打磨系统还包括设置在芯片打磨工位的油箱,在所述油箱中容纳有绝缘油;在打磨所述芯片时,所述芯片的被打磨部位被浸没在所述油箱的绝缘油中。
21.根据本发明的另一个实例性的实施例,在所述托盘上同时装载有多个芯片,所述打磨装置适于对所述托盘上的多个芯片逐个进行打磨或者适于对所述托盘上的多个芯片同时进行打磨。
22.在根据本发明的前述各个实例性的实施例中,芯片打磨系统能够自动完成芯片的打磨,而且能够保证打磨好的芯片的参数值等于预定值,提高了打磨效率和精度。
23.通过下文中参照附图对本发明所作的描述,本发明的其它目的和优点将显而易见,并可帮助对本发明有全面的理解。
附图说明
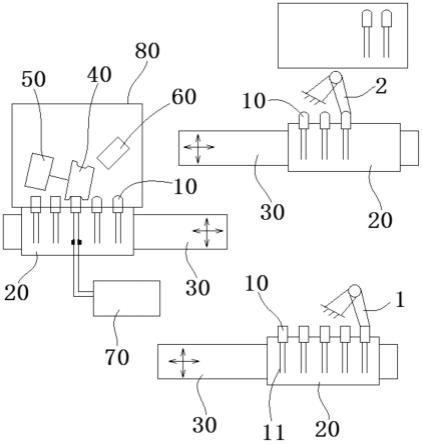
24.图1显示根据本发明的一个实例性的实施例的芯片打磨系统的示意图;
25.图2显示根据本发明的一个实例性的实施例的芯片打磨系统的打磨装置和检测装置的示意图。
具体实施方式
26.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。在说明书中,相同或相似的附图标号指示相同或相似的部件。下述参照附图对本发明实施方式的说明旨在对本发明的总体发明构思进行解释,而不应当理解为对本发明的一种限制。
27.另外,在下面的详细描述中,为便于解释,阐述了许多具体的细节以提供对本披露实施例的全面理解。然而明显地,一个或多个实施例在没有这些具体细节的情况下也可以
被实施。在其他情况下,公知的结构和装置以图示的方式体现以简化附图。
28.根据本发明的一个总体技术构思,提供一种芯片打磨系统,包括:托盘,用于装载待打磨的芯片;打磨装置,用于对装载在所述托盘上的芯片进行打磨;检测装置,用于实时检测当前被打磨的芯片的参数值;和控制装置,适于根据检测到的所述参数值控制所述打磨装置对所述芯片的打磨量,使得打磨好的芯片的所述参数值等于预定值。
29.图1显示根据本发明的一个实例性的实施例的芯片打磨系统的示意图;图2显示根据本发明的一个实例性的实施例的芯片打磨系统的打磨装置40、50和检测装70的示意图。
30.如图1和图2所示,在图示的实施例中,该芯片打磨系统包括:托盘20,打磨装置40、50,检测装置70和控制装置(未图示)。托盘20用于装载和固定待打磨的芯片10。打磨装置40、50用于对装载在托盘20上的芯片10进行打磨。检测装置70用于实时检测当前被打磨的芯片10的参数值。控制装置适于根据检测装置70检测到的参数值控制打磨装置40、50对芯片10的打磨量,使得打磨好的芯片10的参数值等于预定值。控制装置可以为运行在计算机上的由软件或软件和硬件构成的功能模块。
31.如图1和图2所示,在图示的实施例中,检测装置70用于实时检测当前被打磨的芯片10的电阻值,以使得打磨好的芯片10的电阻值等于预定电阻值。但是,本发明不局限于此,检测装置70还可以用于实时检测当前被打磨的芯片10的其他参数值,例如,电流值或电压值等。
32.如图1和图2所示,在图示的实施例中,在芯片10上连接有两条导线11。两条导线11可以是柔软导线并分别电连接至芯片10的正、负电极端。在托盘20上设置有夹具(未图示),该夹具适于同时夹持和固定芯片10和与芯片10相连的两条导线11。
33.如图1和图2所示,在图示的实施例中,检测装置70与被打磨的芯片10上的两条导线11电连接并经由两条导线11电连接至芯片10,以检测被打磨的芯片10的参数值。
34.如图1和图2所示,在图示的实施例中,打磨装置40、50包括打磨头40和驱动打磨头40旋转的驱动器50。控制装置根据检测到的参数值控制被打磨的芯片10向打磨头40的进给量,以控制打磨头40对芯片10的打磨量。前述驱动器50可以为电机等旋转驱动装置。
35.如图1和图2所示,在图示的实施例中,在打磨头40上形成有围绕其旋转轴线的环形沟槽41,该环形沟槽41的内表面41a用于接触和打磨芯片10的端部。
36.如图1和图2所示,在图示的实施例中,环形沟槽41的内表面的截面轮廓呈预定的曲线状,以使打磨好的芯片10的端部呈预定形状。在图示的实施例中,打磨好的芯片10的端部呈弧形,环形沟槽41的内表面的截面轮廓呈v字形。
37.如图1和图2所示,在图示的实施例中,芯片打磨系统还包括托盘移动装置30。该托盘移动装置30能够将托盘20从芯片装载工位移动到芯片打磨工位、从芯片打磨工位移动到芯片卸载工位和从芯片卸载工位移动到芯片装载工位。
38.如图1和图2所示,在图示的实施例中,当托盘20被移动芯片装载工位时,芯片10被装载到托盘20上。当托盘20被移动芯片打磨工位时,打磨装置40、50对托盘20上的芯片10进行打磨。当托盘20被移动芯片卸载工位时,打磨好的芯片10被从托盘20上卸下。
39.如图1和图2所示,在图示的实施例中,芯片打磨系统还包括设置在芯片装载工位的装载机器人1。该装载机器人1用于将芯片10装载到托盘20上。
40.如图1和图2所示,在图示的实施例中,芯片打磨系统还包括设置在芯片卸载工位
的卸载机器人1。该卸载机器人2用于将芯片10从托盘20上卸下。
41.如图1和图2所示,在图示的实施例中,在打磨芯片10之前,控制装置通过控制托盘移动装置30将芯片10移动到预定的打磨位置。也就是说,托盘移动装置30在控制装置的控制下将芯片10移动到预定的打磨位置。在图示的实施例中,将芯片10的端部移动到打磨头40的环形沟槽41中并与环形沟槽41的内表面接触的位置。
42.如图1和图2所示,在图示的实施例中,芯片打磨系统还包括摄像机60和计算装置(未图示)。摄像机60用于拍摄被移动到芯片打磨工位的托盘20上的芯片10的图像。计算装置用于根据摄像机60拍摄到的图像计算出芯片10的实际位置,计算装置可以为运行在计算机上的功能模块。控制装置根据计算出的实际位置和预定的打磨位置之间的差值来控制芯片10的位置,以将芯片10移动到预定的打磨位置。这样,可以实现位置的闭合反馈控制,提高位置控制精度。
43.如图1和图2所示,在图示的实施例中,在打磨芯片10时,托盘移动装置30在控制装置的控制下沿图2中的箭头f所示的方向朝向打磨头40移动被打磨的芯片10,以实现被打磨的芯片10向打磨头40的进给。因此,在图示的实施例中,在打磨芯片10时,控制装置可以通过控制托盘移动装置30来控制被打磨的芯片10向打磨头40的进给量。
44.如图1和图2所示,在图示的实施例中,在打磨芯片10时,控制装置根据检测到的参数值与预定的参数值之间的差值来控制被打磨的芯片10向打磨头40的进给量,以使得打磨好的芯片10的参数值等于预定值。这样,可以实现闭环反馈控制,提高了控制精度。
45.如图1和图2所示,在图示的实施例中,芯片打磨系统还包括设置在芯片打磨工位的油箱80,在油箱80中容纳有绝缘油。在打磨芯片10时,芯片10的被打磨部位被浸没在油箱80的绝缘油中。这样可以提高打磨质量,而且不会影响芯片10的参数值的检测。
46.如图1和图2所示,在图示的实施例中,在托盘20上同时装载有多个芯片10。在图示的实施例中,打磨装置40、50适于对托盘20上的多个芯片10逐个进行打磨。但是,本发明不局限于此,打磨装置40、50也可以被设计成适于对托盘20上的多个芯片10同时进行打磨,这样可以提高打磨效率。请注意,此时,检测装置要同时检测多个芯片10的参数值。
47.本领域的技术人员可以理解,上面所描述的实施例都是示例性的,并且本领域的技术人员可以对其进行改进,各种实施例中所描述的结构在不发生结构或者原理方面的冲突的情况下可以进行自由组合,这些变化理应落入本发明的保护范围以内。
48.虽然结合附图对本发明进行了说明,但是附图中公开的实施例旨在对本发明优选实施方式进行示例性说明,而不能理解为对本发明的一种限制。
49.虽然本发明的总体构思的一些实施例已被显示和说明,本领域普通技术人员将理解,在不背离本发明的总体构思的原则和精神的情况下,可对这些实施例做出改变,本发明的范围以权利要求和它们的等同物限定。
50.应注意,措词“包括”不排除其它元件或步骤,措词“一”或“一个”不排除多个。另外,权利要求的任何元件标号不应理解为限制本发明的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1