一种举升手臂与定位旋转平台同心校正工具的制作方法
1.本技术涉及cvd真空镀膜领域,尤其是涉及一种举升手臂与定位旋转平台同心校正工具。
背景技术:
2.化学气相沉积(cvd, chmical vapor deposition)工艺中, cvd设备利用射频电源为反应源提供能量,反应源运动衬底表面成核,核继续生长成薄膜。通常cvd包含若干loadlock腔、转运腔、定位腔、工艺腔、冷却腔。在工艺过程中,cvd设备转运腔的传片机器人(robot)的blade总成需要将晶圆分步骤在各功能腔转运完成工艺过程。
3.参照图1,现有设备上的定位腔01,其内部转动设置有定位旋转平台02,定位旋转平台02通过电机03驱动,在定位旋转平台02的一侧设置有举升手臂04,举升手臂04包括连接部041和一体成型在连接部041一侧的两个承托臂042,两个承托臂042关于定位旋转平台02的圆心呈中心对称设置,两个承托臂042靠近定位旋转平台02的一侧呈弧形设置,弧形的弧心与定位旋转平台02的圆心重合,且弧形的半径大于定位旋转平台02的半径。在每个承托臂042靠近定位旋转平台02的一侧开设有承托弧槽043,承托弧槽043与定位旋转平台02同心,承托弧槽043用于承托晶圆片,承托弧槽043的侧壁为斜面044。
4.举升手臂04滑动设置在定位腔01内部,举升手臂04沿平行于定位旋转平台02的轴线方向滑动,举升手臂04的滑动通过气缸05驱动,气缸05的活塞杆上固定连接有连接板06,连接板06通过螺丝与举升手臂04固定连接。气缸05的活塞杆上套设有波纹管07,波纹管07一端固定连接在连接板06上,另一端连接在定位腔01内壁上。在定位腔01内部还安装有信号接受发射装置08,信号接受发射装置08用以检测晶圆片是否与定位旋转平台02同心,并将信号发射至机器人。
5.在初始状态下,举升手臂04低于定位旋转平台02,在工艺过程中,机器人取到的晶圆片首先要送到定位腔01,机器人将晶圆片放在定位旋转平台02的上方,此时气缸05的活塞杆伸张时,举升手臂04的承托臂042对定位旋转平台02上方的晶圆片进行承托。而后机器人退出定位腔01,气缸05的活塞杆收缩,带动举升手臂04下移,将晶圆片放置在定位旋转平台02上,之后再通过举升手臂04将晶圆片举起,等待机器人取出晶圆片。
6.当信号接受发射装置08检测到晶圆片存在偏心时,会将数据反馈到下次取片的机器人,机器人会纠正角度位置重新取走该片。若举升手臂04与定位旋转平台02不同心时,虽然信号接受发射装置08已经得到晶圆片的偏差角度,但是在举升手臂04将晶圆片举起的过程中,晶圆片会在举升手臂04的斜面044上滑动,导致安装过程中偏差较大,因此 这便要求举升手臂04的弧槽与定位旋转平台02同心。
7.在实现本技术过程中,发明人发现该技术中至少存在如下问题:当前举升手臂的安装没有定位基准约束,安装时仅靠人工经验将举升手臂的弧心与定位旋转平台的圆心保持同心的状态,会导致举升手臂在安装过程中偏差较大。
技术实现要素:
8.为了减小举升手臂安装的偏差,本技术提供一种举升手臂与定位旋转平台同心校正工具。
9.本技术提供的一种举升手臂与定位旋转平台同心校正工具采用如下的技术方案:
10.一种举升手臂与定位旋转平台同心校正工具,包括圆板本体,所述圆板本体的一侧设置有圆环,所述圆板本体与所述圆环同心设置,所述圆环用于套设在定位旋转平台的外部,所述圆环的外圆用于贴合举升手臂弧形的侧壁。
11.通过采用上述技术方案,在安装举升手臂前,先将校正工具放置在两个承托臂之间,使圆环的外圆贴合承托臂的侧壁,此时圆环的圆心与承托臂的弧心重合,再将圆环套设在定位旋转平台的外部,使圆环与定位旋转平台同心,从而使承托臂的弧心与定位旋转平台的圆心重合,确定举升手臂的位置后,再对举升手臂进行安装,从而减小举升手臂安装的偏差。
12.可选的,所述圆板本体的直径大于所述圆环外圆的直径,所述圆板本体的周边与斜面抵触。
13.通过采用上述技术方案,利用圆板本体的周边与斜面抵触,使圆板本体与承托臂之间形成二次接触,使圆板本体与承托臂保持同心,进一步提升对举升手臂安装位置的校正效果。
14.可选的,所述圆板本体与所述圆环之间设置有限位环,所述限位环的外圈与所述圆环的外圈齐平,所述限位环的内圈小于所述圆环的内圈。
15.通过采用上述技术方案,利用限位环使圆环的内圈和限位环的内圈之间形成台阶面,可使直径更小的定位旋转平台可插入限位环的内圈,以此适应不同尺寸的定位旋转平台,提升校正工具的适应性。
16.可选的,所述圆板本体、所述圆环与所述限位环三者一体成型设置。
17.通过采用上述技术方案,将圆板本体、圆环与限位环三者一体成型设置,有助于提升校正工具的整体强度,提升校正工具工作的稳定性。
18.可选的,所述圆板本体、所述圆环与所述限位环三者均为电木材质。
19.通过采用上述技术方案,电木材质具有较高的机械强度、良好的绝缘性,同时电木材质耐热、耐腐蚀,可提升校正工具的性能。
20.可选的,所述圆板本体上设置有连接杆,所述圆板本体上开设有连接孔,所述连接杆与所述连接孔的侧壁螺纹连接。
21.通过采用上述技术方案,利用连接杆连接在原板本体上,方便借助连接杆移动圆板本体,使圆板本体的拿取更加方便。
22.可选的,所述连接孔位于所述圆板本体的圆心位置。
23.通过采用上述技术方案,将连接孔开设在圆板本体的圆心位置,可使元板本体受力更加均匀。
24.综上所述,本技术包括以下至少一种有益技术效果:
25.1.在安装举升手臂前,先将校正工具放置在两个承托臂之间,使圆环的外圆贴合承托臂的侧壁,此时圆环的圆心与承托臂的弧心重合,再将圆环套设在定位旋转平台的外部,使圆环与定位旋转平台同心,从而使承托臂的弧心与定位旋转平台的圆心重合,确定举
升手臂的位置后,再对举升手臂进行安装,从而减小举升手臂安装的偏差;
26.2.利用圆板本体的周边与斜面抵触,使圆板本体与承托臂之间形成二次接触,使圆板本体与承托臂保持同心,进一步提升对举升手臂的校正效果;
27.3.将圆板本体、圆环与限位环三者一体成型设置,有助于提升校正工具的整体强度,提升校正工具工作的稳定性。
附图说明
28.图1是本技术背景技术中体现定位腔内部结构的示意图。
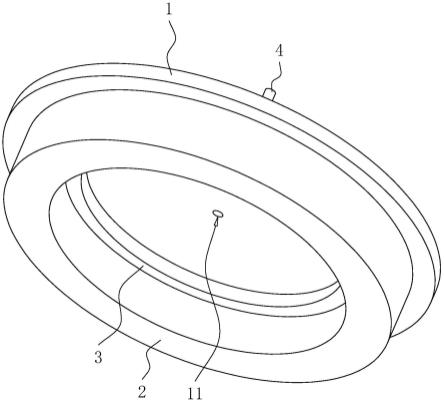
29.图2是本技术实施例的整体结构示意图。
30.图3是本技术实施例中体现校正工具与举升手臂配合关系的俯视图。
31.图4是图3中a-a向的剖视图。
32.附图标记说明:
33.01、定位腔;02、定位旋转平台;03、电机;04、举升手臂;041、连接部;042、承托臂;043、承托弧槽;044、斜面;05、气缸;06、连接板;07、波纹管;08、信号接受发射装置;1、圆板本体;11、连接孔;2、圆环;3、限位环;4、连接杆。
具体实施方式
34.以下结合附图2-4对本技术作进一步详细说明。
35.本技术实施例公开一种举升手臂与定位旋转平台同心校正工具。参照图2,一种举升手臂与定位旋转平台同心校正工具包括圆板本体1,在圆板本体1的一侧依次设置有限位环3和圆环2,圆板本体1、限位环3与圆环2三者同心设置,圆板本体1的直径大于圆环2外圆的直径,限位环3的外圈与圆环2的外圈齐平,限位环3的内圈小于圆环2的内圈。
36.参照图3和图4,在使用时,将圆环2卡设在两个承托臂042之间,圆环2的外圈贴合承托臂042的侧壁,圆板本体1的周边与斜面044抵触,从而使承托臂042的弧心与圆环2的圆心重合,而后将圆环2套设在定位旋转平台02的外部,此时定位旋转平台02的圆心与圆环2的圆心重合,最终使承托臂042的弧心与圆环2的圆心重合,而后再进行举升手臂04的安装。
37.参照图2,圆板本体1、圆环2与限位环3三者均为电木材质,且圆板本体1、限位环3与圆环2三者一体成型设置。电木材质具有较高的机械强度、良好的绝缘性,同时电木材质耐热、耐腐蚀,使用电木材质制造校正工具,可提升校正工具的整体性能。
38.参照图2,为了方便拿取校正工具,在圆板本体1上设置有连接杆4,连接杆4与圆板本体1垂直设置,在圆板本体1的圆心位置还开设有连接孔11,连接杆4的端部与连接孔11螺纹连接。从而方便借助连接杆4拿取校正工具,提升校正工具使用的便利性。
39.本技术实施例一种举升手臂与定位旋转平台同心校正工具的实施原理为:将连接杆4连接在圆板本体1上,在使用时,将圆环2卡设在两个承托臂042之间,此时圆环2的外圈贴合承托臂042的侧壁,同时圆板本体1的周边与斜面044抵触,使承托臂042的弧心与圆环2的圆心重合,而后将圆环2套设在定位旋转平台02的外部,使定位旋转平台02的圆心与圆环2的圆心重合,此时承托臂042的弧心与圆环2的圆心重合,确定举升手臂04的位置后再进行举升手臂04的安装。
40.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术
的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1