人车互动的方法与流程
1.本发明是关于车用技术的相关领域,尤指一种人车互动的方法。
背景技术:
2.随着无线通信技术的进步,目前市售的汽车大部分都已搭载免钥匙系统(keyless entry system)。当用户手持电子式车钥匙靠近其汽车的车门时,安装在汽车内的免钥匙系统便可利用无线通信完成该电子式车钥匙的认证识别,接着自动解锁车门。
3.由前述说明可知,传统的免钥匙系统具有一个重大缺点,即,只要手持对应的电子式车钥匙靠近车门,汽车内的免钥匙系统在利用无线通信完成该电子式车钥匙的认证识别之后,便会自动解锁车门。
4.进一步地,随着距离传感器(如超音波传感器、光学近接传感器)技术的进步,搭配距离传感器的免钥匙系统也被开发及应用。举例而言,中国专利公开号cn110462156a提出一种车辆用门开闭系统,包括:至少一超音波传感器以及一免钥匙系统(即,主控系统),其中,该超音波传感器设置在一车门下放处。当用户手持电子式车钥匙靠近其汽车的车门时,安装在汽车内的免钥匙系统便可利用无线通信完成该电子式车钥匙的认证识别。进一步地,在用户伸出其脚以使该超音波传感器检测到物体后,若该超音波传感器在经过一段时间后未检测到物体,则该免钥匙系统自动解锁车门。
5.在应用中国专利公开号cn110462156a所提出的车辆用门开闭系统的过程中,在汽车内的免钥匙系统已经利用完成该电子式车钥匙的认证识别之后,用户仍必须伸出其脚以令超音波传感器完成物体感测,如此该免钥匙系统才会自动解锁车门。然而,实务经验显示,对于老人、行动不便者、以及抱有重物者而言,在其伸出单脚的过程中可能会失去平衡而摔倒。
6.由前述说明可知,传统的免钥匙系统以及中国专利公开号cn110462156a所提出的车辆用门开闭系统皆仍具有加以改善的空间。有鉴于此,本案的发明人极力加以研究发明,而终于研发完成一种人车互动的方法。
技术实现要素:
7.本发明的主要目的在于提供一种人车互动的方法,利用整合于一汽车之中的一主控制装置实现;其中,该汽车装设有多个近距离感测单元与多个多维度感测单元,且该主控制装置具有一无线通信单元用以对一电子式车钥匙执行一免钥匙进入(keyless entry)认证。本发明的方法利用所述近距离感测单元侦测靠近汽车的一物体,且利用多个所述多维度感测单元侦测该物体的多维度数据,从而依据所述多维度数据判断该物体的一物体动作。在所述物体动作与预存于数据库内的多组参考物体动作的任一组相符合的情况下,该主控制装置控制汽车执行例如自动解锁车门、车灯控制、引擎启动等汽车动作,实现人车互动。并且,在触发汽车执行指定的汽车动作的过程中,仍可持续进行物体追踪感测,以确保汽车进行动作时不会危害人员安全或导致汽车受损。
8.为达成上述目的,本发明提出所述人车互动的方法的一实施例,其利用整合于一汽车之中的一主控制装置实现;其中,该汽车装设有多个近距离感测单元、多个第一多维度感测单元与多个第二多维度感测单元,且该主控制装置具有一无线通信单元;所述人车互动的方法包括以下步骤:
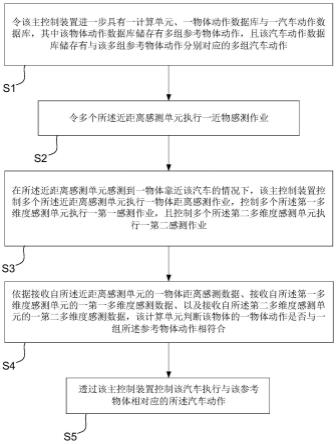
9.(1)令该主控制装置进一步具有一计算单元、一物体动作数据库与一汽车动作数据库,其中该物体动作数据库储存有多组参考物体动作,且该汽车动作数据库储存有与该多组参考物体动作分别对应的多组汽车动作;
10.(2)令多个所述近距离感测单元执行一近物感测作业;
11.(3)在所述近距离感测单元感测到一物体靠近该汽车的情况下,该主控制装置控制多个所述近距离感测单元执行一物体距离感测作业,控制多个所述第一多维度感测单元执行一第一感测作业,且控制多个所述第二多维度感测单元执行一第二感测作业;
12.(4)依据接收自所述近距离感测单元的一物体距离感测数据、接收自所述第一多维度感测单元的一第一多维度感测数据、以及接收自所述第二多维度感测单元的一第二多维度感测数据,该计算单元判断该物体的一物体动作是否与一组所述参考物体动作相符合;以及
13.(5)透过该主控制装置控制该汽车执行与该参考物体相对应的所述汽车动作。
14.在一实施例中,该主控制装置还具有一设定单元,用以对该主控制装置进行设定,使其在所述物体靠近该汽车的情况下进行一物体动作认证及/或一免钥匙进入(keyless entry)认证。
15.在一实施例中,该主控制装置进一步具有一气候信息获知单元,用以获知一实时气候信息,从而使该计算单元对所述物体距离感测数据、所述第一多维度感测数据及/或所述第二多维度感测数据进行一权重调整运算。
16.在可行的实施例中,该多组汽车动作包括但不限于:门锁动作、车门动作、车灯动作、车窗动作、引擎动作、冷气机动作、暖气机动作、摄影机动作、与喇叭动作。
17.在一实施例中,在需要执行所述免钥匙进入(keyless entry)认证的情况下,该步骤(4)和该步骤(5)之间还包括以下步骤:
18.(4a)该无线通信单元与该物体所携有的一电子式车钥匙进行无线通信,从而对该电子式车钥匙进行一钥匙认证作业;
19.其中,在该无线通信单元和该电子式车钥匙进行无线通信的过程中,该计算单元可依据一信号接收强度指标(received signal strength indicator,rssi)计算出该电子式车钥匙的位置。
20.在一实施例中,在该计算单元判断所述物体动作不符合任一组所述参考物体动作同时该无线通信单元并没有和所述电子式车钥匙进行无线通信的情况下,该主控制装置控制该汽车所搭载的至少一摄影机进行一摄影工作。
21.在可行的实施例中,该近距离感测单元可为远红外雷达、近红外光雷达、超声波雷达、微波雷达、或毫米波(millimeter wave)雷达。
22.在一可行实施例中,该第一多维度感测单元为一微波雷达或一毫米波雷达,且该第二多维度感测单元为一光学雷达(light detection and ranging,lidar)。
23.在另一可行实施例中,该第二多维度感测单元可为光学雷达(lidar)或摄影机。
24.在一实施例中,该第一多维度感测单元所感测的所述第一多维度感测数据包括:速度、角度和距离,且该第二多维度感测单元所感测的所述第二多维度感测数据包括:形状、距离、方位角、仰角和速度。
附图说明
25.图1为一汽车的前视图;
26.图2为一汽车的后视图;
27.图3为一汽车的上视图;
28.图4为一汽车的侧视图;
29.图5为该汽车之中的一主控制装置的方块图;
30.图6为本发明的一种人车互动的方法的流程图;
31.图7a与图7b为该汽车的立体图;以及
32.图8为该汽车的侧视图。
33.图中主要符号说明:
34.2:汽车
35.21:主控制装置
36.210:计算单元
37.211:物体动作数据库
38.212:无线通信单元
39.213:汽车动作数据库
40.214:设定单元
41.215:气候信息获知单元
42.22:近距离感测单元
43.23:第一多维度感测单元
44.24:第二多维度感测单元
45.22a:冷气机
46.22b:暖气机
47.22c:摄影机
48.22d:车门
49.22h:喇叭
50.22l:车灯
51.22w:车窗
52.3:电子式车钥匙
53.4:物体
54.s1~s5:步骤
具体实施方式
55.为了能够更清楚地描述本发明所提出的一种人车互动的方法,以下将配合图式,详尽说明本发明的较佳实施例。
56.请参阅图1、图2、图3、与图4、其分别显示一汽车的前视图、后视图、上视图、和侧视图。本发明的人车互动的方法是利用整合于该汽车2之中的一主控制装置21实现,其中该汽车2装设有多个近距离感测单元22、多个第一多维度感测单元23与多个第二多维度感测单元24。进一步地,图5显示整合于该汽车2之中的该主控制装置21的方块图。如图5所示,该主控制装置21具有一无线通信单元212用以对一电子式车钥匙3执行一免钥匙进入认证。换句话说,该电子式车钥匙3和该无线通信单元212组成一免钥匙进入系统(keyless entry system)。
57.继续地图1~图5,并请同时参阅图6,其显示本发明的一种人车互动的方法的流程图。由图5与图6可知,为了使该主控制装置21能够控制汽车2实现人车互动,方法流程首先执行步骤s1:令该主控制装置21进一步具有一计算单元210、一物体动作数据库211与一汽车动作数据库213,其中该物体动作数据库211储存有多组参考物体动作,且该汽车动作数据库213储存有与该多组参考物体动作分别对应的多组汽车动作。
58.补充说明的是,图1~图5绘示该汽车2装设有多个近距离感测单元22、多个第一多维度感测单元23与多个第二多维度感测单元24。依据本发明的设计,所述近距离感测单元22为低耗电的雷达传感器,如远红外雷达、近红外光雷达、超声波雷达、微波雷达、或毫米波(millimeter wave)雷达等。举例而言,可采用超声波雷达作为所述近距离感测单元22。另一方面,该第一多维度感测单元23可为一微波雷达或一毫米波雷达。不同于低耗电的雷达传感器(即,近距离感测单元22)主要用于感测位于汽车2与一物体4之间的距离和速度,微波雷达(即,第一多维度感测单元23)能够对所述物体4进行速度、角度和距离的多维度数据感测。换句话说,本发明利用所述第一多维度感测单元23执行一多维度感测作业,从而获得包括速度、角度和距离的第一多维度感测数据。更详细地说明,在可行的实施例中,该第二多维度感测单元22可为一光学雷达(light detection and ranging,lidar)或为一摄影机,用以对所述物体4执行一多维度感测作业,从而获得第二多维度感测数据。举例而言,该第二多维度感测单元22为一光学雷达(lidar),其能够对所述物体4进行形状、距离、方位角、仰角和速度的感测。
59.继续地参阅图1~图4,且同时参阅图5与图6。在完成该主控制装置21的多个功能单元的设置之后,方法流程接着执行步骤s2:令多个所述近距离感测单元22(即,低耗电的超声波雷达)执行一近物感测作业。继续地,方法流程执行步骤s3:在所述近距离感测单元22感测到一物体4靠近该汽车2的情况下,该主控制装置21控制多个所述近距离感测单元22执行一物体距离感测作业,控制多个所述第一多维度感测单元23执行一第一多维度感测作业,且控制多个所述第二多维度感测单元24执行一第二多维度感测作业。举例而言,如图7a所示,当物体4(即,用户)靠近汽车2的右前方时,汽车2的前雷达(即,近距离感测单元22)立刻感测到有物体4靠近,且可检测出该物体4与该汽车2的距离。此时,在该主控制装置21的控制下,汽车2的前微波雷达(即,第一多维度感测单元23)对该物体4执行多维度数据感测以获得速度、角度和距离等数据,且汽车2的前光学雷达(即,第二多维度感测单元24)对该物体4执行多维度数据感测以获得形状、距离、方位角、仰角和速度等数据。
60.接着,方法流程执行步骤s4:依据接收自所述近距离感测单元22的一物体距离感测数据、接收自所述第一多维度感测单元23的一第一多维度感测数据、以及接收自所述第二多维度感测单元24的一第二多维度感测数据,该计算单元210判断该物体的一物体动作
是否与一组所述参考物体动作相符合。最终,在步骤s5中,透过该主控制装置21控制该汽车2执行与该参考物体相对应的所述汽车动作。举例而言,如图7a与图7b所示,若位于汽车2右前方的物体4(用户)的物体动作显示出其逐渐远离汽车2,则主控制装置21调整汽车2的车灯22l的光线方向以加强右前方照明。
61.进一步地,为了使该主控制装置21能够更快速地控制汽车2执行人车互动,可令该主控制装置21还具有一设定单元214,使用户可以自行对该主控制装置21进行设定,从而使该主控制装置21在所述物体靠近该汽车2的情况下同时执行一物体动作认证与一免钥匙进入(keyless entry)认证。举例而言,如图5、图7a与图7b所示,当用户(即,物体4)手持电子式车钥匙3出现在汽车2的右前方时,该主控制装置21的无线通信单元212即与该电子式车钥匙3进行无线通信,从而对该电子式车钥匙3进行一钥匙认证程序。在该无线通信单元212和该电子式车钥匙3进行无线通信的过程中,该计算单元210可依据一信号接收强度指标(received signal strength indicator,rssi)计算出该电子式车钥匙3的位置。此时,若该主控制装置21辨识出用户逐渐远离汽车2,便控制汽车2的车灯22l加强右前方照明。反之,若该主控制装置21辨识出用户逐渐靠近汽车2,该主控制装置21可控制车灯22l进行闪光及/或控制喇叭22h发出警示声,达到提示该汽车2所在位置的效果。
62.应可理解,透过该设定单元214,用户可以自行设定多组参考物体动作,例如:逐渐接近汽车2、逐渐远离汽车2、移动至汽车2的车门22d附近的一处后不动、先接近汽车2之后再远离汽车2等各式动作,并将每组参考物体动作与一个汽车动作相关联。同样地,用户可以通过设定让主控制装置21控制汽车2执行任何可行的动作,如图5所示,包括但不限于:车窗22w动作、冷气机22a动作、暖气机22b动作、引擎22e动作、车灯22l动作、车门22d动作、摄影机22c动作、喇叭22h动作。如此设置,当用户(物体4)靠近汽车2之后便接着完成一个参考物体动作,则该主控制装置21便可以在进行物体动作的辨识之后,自动地控制汽车2执行指定的动作。举例而言。如图8所示,当用户(即,物体4)手持电子式车钥匙3站在汽车2的滑动车门之前,主控制装置21在完成钥匙认证程序以及物体动作的辨识之后,便会控制滑动车门自行滑行打开。并且,在触发汽车2执行指定的汽车动作的过程中,仍可持续进行物体4追踪感测,以确保汽车2进行动作时不会危害人员安全或导致汽车受损。
63.此外,用户还可透过该设定单元214设定一防窃保护功能。在一示范性实施例中,用户可通过设定使该主控制装置21在判断靠近汽车2的物体4所执行的物体动作不符合任一组所述参考物体动作以及该无线通信单元212并没有和所述电子式车钥匙3进行无线通信的情况下,控制该汽车2所搭载的至少一个摄影机22c进行一摄影工作。换句话说,若有未持有电子式车钥匙3的人靠近汽车2,而后在汽车2附近作了一些非用户自行设定的动作,该主控制装置21便会控制摄影机22c进行摄影,实现防窃保护的功能。
64.熟悉车用光学传感器及/或雷达的设计与制作的电子工程师必然知道,超声波雷达可以测量物体的距离及速度,且不受天气影响。并且,光学雷达除了可以量测物体的方位角、仰角和速度,还可以感测物体的形状、距离等信息。另一方面,光学摄影机透过机器视觉算法,拥有较佳的物体辨识能力,然而其容易受到浓雾、大雨、强光等天气影响。换句话说,气候会影响传感器的精准度。因此,如图5所示,本发明令该主控制装置21进一步具有一气候信息获知单元215,用以获知一实时气候信息,从而使该计算单元210依据所述实时气候信息对接收自所述近距离感测单元22的物体距离感测数据、接收自所述第一多维度感测单
元23的第一多维度感测数据、以及接收自所述第二多维度感测单元24的第二多维度感测数据进行一自适应权重调整运算(adaptive weight modulating operation),接着才进行物体动作辨识。
65.如此,上述已完整且清楚地说明本发明的一种人车互动的方法。必须加以强调的是,上述的详细说明是针对本发明可行实施例的具体说明,而该实施例并非用以限制本发明的专利范围,凡未脱离本发明技艺精神所为的等效实施或变更,均应包含于本案的专利范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1