一种仿生波动鳍水路两栖推进装置
本技术涉及水陆两栖机器人,具体为一种仿生波动鳍水路两栖推进装置。
背景技术:
1、cn113696685a一种仿生波动鳍无鳍条水路两栖推进装置,使用此种传动结构,在运动时主要依靠舵机承受运动时的力,很容易导致运动时舵机偏差,使运动不稳定。
技术实现思路
1、本实用新型提供了一种仿生波动鳍水路两栖推进装置,具备提高稳定性的优点,以解决上述背景技术中提出的问题。
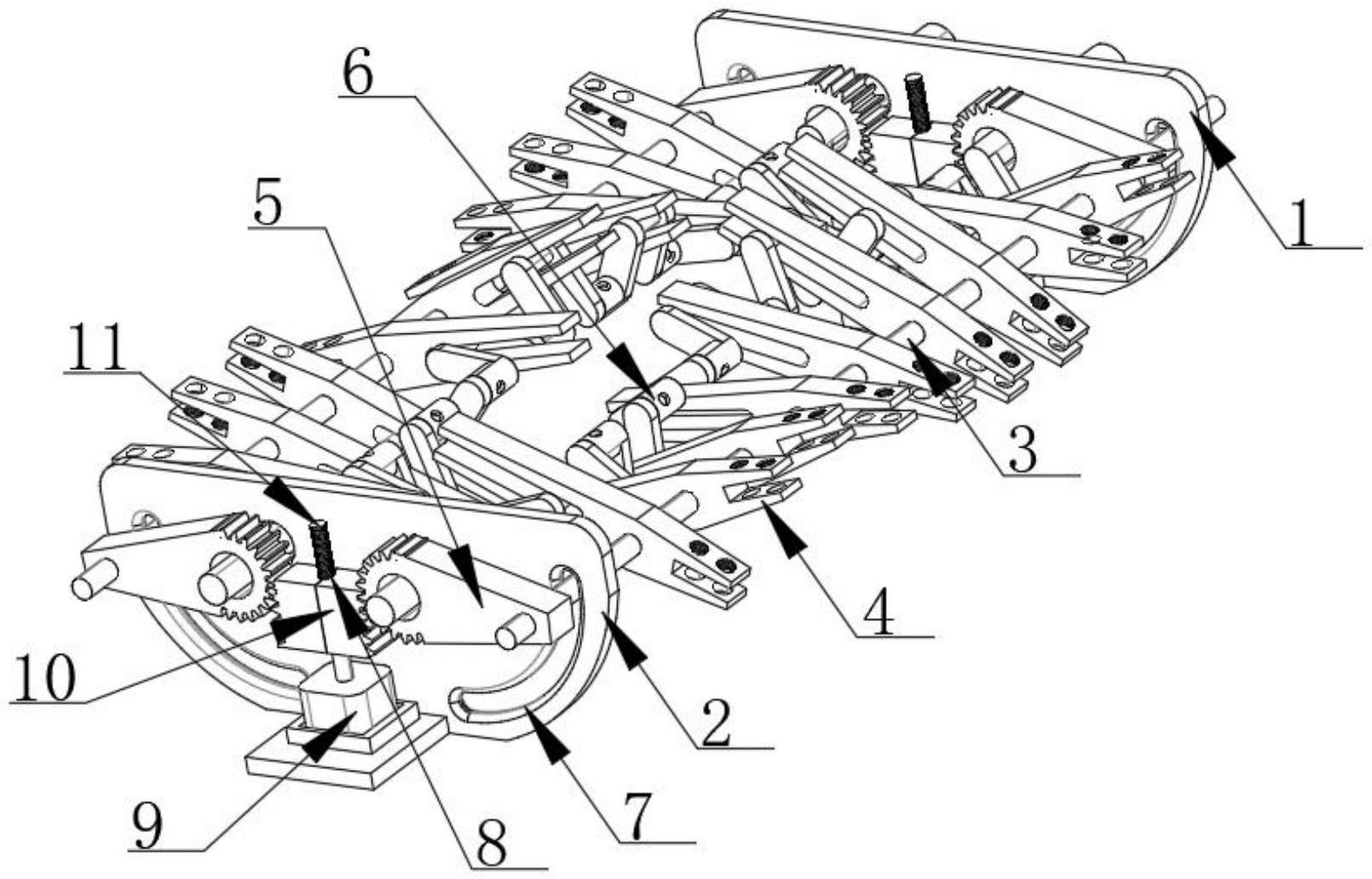
2、为实现提高稳定性的目的,本实用新型提供如下技术方案:一种仿生波动鳍水路两栖推进装置,包括第一固定板和第二固定板,所述第一固定板和第二固定板通过滚珠轴承固定套接有曲轴,所述曲轴的外侧设有侧摆杆,所述侧摆杆靠近曲轴的一端开设有切口,所述曲轴活动插接在切口内部,所述曲轴外侧设有升降结构,所述第一固定板的顶部螺钉固定连接有舵机,所述第一固定板的正面到第二固定板的背面开设有弧形通孔,所述弧形通孔的内壁活动插接有转动轴,所述转动轴与侧摆杆固定套接。
3、作为本实用新型的一种优选技术方案,所述升降结构包括齿块、螺纹杆和竖直摆杆,所述齿块的顶部到底部之间开设有螺纹孔,所述螺纹杆与螺纹孔螺纹连接。
4、作为本实用新型的一种优选技术方案,所述竖直摆杆靠近齿块的一侧带有齿面,该齿面与齿块啮合连接。
5、作为本实用新型的一种优选技术方案,所述舵机与螺纹杆的底部。
6、作为本实用新型的一种优选技术方案,所述竖直摆杆与曲轴活动套接,所述竖直摆杆与转动轴固定套接。
7、与现有技术相比,本实用新型提供了一种仿生波动鳍水路两栖推进装置,具备以下有益效果:
8、1、该仿生波动鳍水路两栖推进装置,通过设置舵机、齿块、螺纹杆和竖直摆杆,在使用时,通过启动舵机带动螺纹杆转动,带动齿块上下移动,带动竖直摆杆摆动,进而带动转动轴沿着弧形通孔内部移动,进而调整边轴位置,转动轴受力时,传递到位于前方的升降机构中竖直摆杆上的力会通过齿块传递到螺纹杆的力主要由螺纹杆承受,使左右两竖直摆杆位置的偏差较小,进而提高运动的稳定性。
技术特征:
1.一种仿生波动鳍水路两栖推进装置,包括第一固定板(2)和第二固定板(1),其特征在于:所述第一固定板(2)和第二固定板(1)通过滚珠轴承固定套接有曲轴(6),所述曲轴(6)的外侧设有侧摆杆(4),所述侧摆杆(4)靠近曲轴(6)的一端开设有切口,所述曲轴(6)活动插接在切口内部,所述曲轴(6)外侧设有升降结构,所述第一固定板(2)的顶部螺钉固定连接有舵机(9),所述第一固定板(2)的正面到第二固定板(1)的背面开设有弧形通孔(7),所述弧形通孔(7)的内壁活动插接有转动轴(3),所述转动轴(3)与侧摆杆(4)固定套接。
2.根据权利要求1所述的一种仿生波动鳍水路两栖推进装置,其特征在于:所述升降结构包括齿块(10)、螺纹杆(11)和竖直摆杆(5),所述齿块(10)的顶部到底部之间开设有螺纹孔(8),所述螺纹杆(11)与螺纹孔(8)螺纹连接。
3.根据权利要求2所述的一种仿生波动鳍水路两栖推进装置,其特征在于:所述竖直摆杆(5)靠近齿块(10)的一侧带有齿面,该齿面与齿块(10)啮合连接。
4.根据权利要求3所述的一种仿生波动鳍水路两栖推进装置,其特征在于:所述舵机(9)与螺纹杆(11)的底部。
5.根据权利要求4所述的一种仿生波动鳍水路两栖推进装置,其特征在于:所述竖直摆杆(5)与曲轴(6)活动套接,所述竖直摆杆(5)与转动轴(3)固定套接。
技术总结
本技术公开了一种仿生波动鳍水路两栖推进装置,涉及水陆两栖机器人技术领域,该仿生波动鳍水路两栖推进装置,包括第一固定板和第二固定板,第一固定板和第二固定板通过滚珠轴承固定套接有曲轴,曲轴的外侧设有侧摆杆,侧摆杆靠近曲轴的一端开设有切口。本技术通过设置舵机、齿块、螺纹杆和竖直摆杆,在使用时,通过启动舵机带动螺纹杆转动,带动齿块上下移动,带动竖直摆杆摆动,进而带动转动轴沿着弧形通孔内部移动,进而调整边轴位置,转动轴受力时,传递到位于前方的升降机构中竖直摆杆上的力会通过齿块传递到螺纹杆的力主要由螺纹杆承受,使左右两竖直摆杆位置的偏差较小,进而提高运动的稳定性。
技术研发人员:李孝宝,浦玉学,郭洪明,石晨绚,柳玄普,殷盛凯
受保护的技术使用者:合肥工业大学
技术研发日:20221214
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!