纯电动车起步阶段质量及道路坡度联合估计方法
本发明涉及电动车控制,特别是一种纯电动车起步阶段质量及道路坡度联合估计方法。
背景技术:
1、随着社会对新能源技术的愈加重视,新能源汽车逐渐兴起并受到消费者的青睐。起步工况作为纯电动车驱动工况中一个重要的行驶工况,特别是在坡道起步时,若输出驱动力出现精度误差可能会影响乘员的舒适性和车辆的安全性。整车质量与道路坡度是车辆纵向动力学的重要参数,进行车辆的主动安全控制,尤其是控制车辆输出期望的加速度时,需要知道较为精确的整车质量与道路坡度参数。对于坡道起步时整车质量与道路坡度的估计,目前主要有两种方法,一是在车辆上附加额外传感器;二是基于车辆纵向动力学方程,使用卡尔曼滤波器、最小二乘法及其变体单一算法同时估计两种参数,最小二乘法对于稳变量质量具有较好的估计结果,卡尔曼滤波器是较为成熟的时变量坡度的估计方法。
2、上述两种方法目前均存在一些问题,其中基于额外传感器的方法,较为依赖传感器的精度且会增加车辆制造成本,而基于车辆纵向动力学的方法,单一算法估计两种变化性质不同的参数估计结果较差。
技术实现思路
1、为解决现有技术中对于坡道起步时整车质量与道路坡度的估计方法中存在的问题,本发明提供了一种低成本并可精确的估计起步时道路坡度和整车质量的纯电动车起步阶段质量及道路坡度联合估计方法。
2、本发明采用的技术方案是:
3、一种纯电动车起步阶段质量及道路坡度联合估计方法,包括如下步骤:
4、s1、采集所需参数;
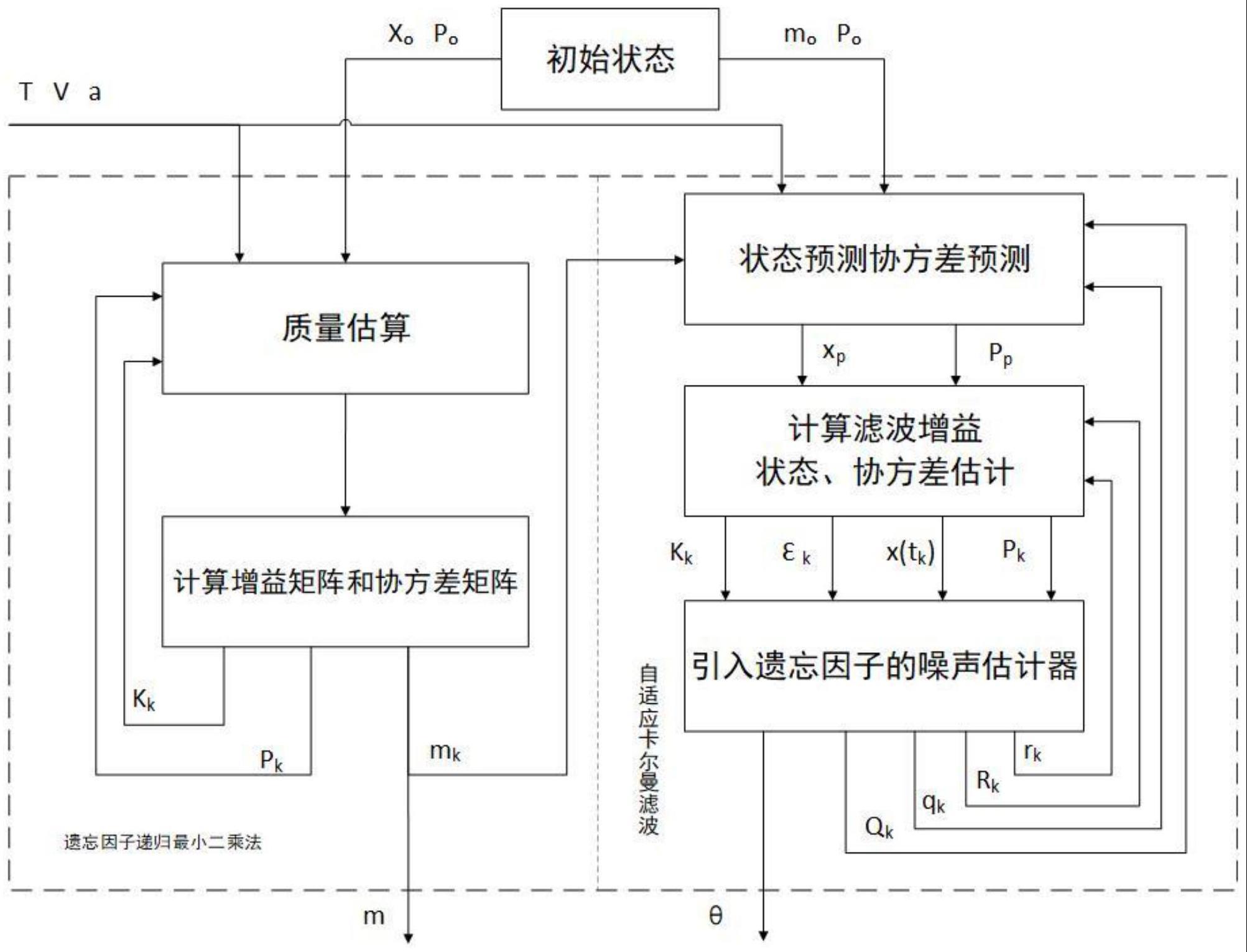
5、s2、采用遗忘因子递归最小二乘法,分析车辆纵向动力学方程,建立纵向动力学模型;
6、s3、采用带双遗忘因子的递推最小二乘法估计车辆质量;
7、s4、将步骤s3中所估计的车辆质量作为输入参数采用自适应卡尔曼滤波估计道路坡度。
8、优选的,在步骤s1中,所需参数分别为驱动电机转矩、车辆速度和车辆加速度。
9、优选的,步骤s2具体如下:
10、分析车辆在实际行驶时的受力,在纵向受到驱动力fw、空气阻力faero、坡度阻力fgrade、滚动阻力fμ的作用,得到简化动力学方程:
11、
12、在式(1)中,m为车辆整车质量,为车辆在x时刻的加速度;
13、将式(1)展开得:
14、
15、式(2)中,t为驱动电机转矩,i为主减速器传动比,η为传动系的机械效率,r为车轮滚动半径,cd为空气阻力系数,a为车辆迎风面积,ρ为空气密度,vx为车辆在x时刻的行驶速度,μ为滚动阻力系数,g为重力加速度,θ为道路坡度;
16、采用遗忘因子递归最小二乘法,考虑到传动系统中摩擦和惯性影响选取参数θμ=tan-1μ建立车辆纵向动力学方程如下:
17、
18、采用自适应卡尔曼滤波,考虑车辆行驶过程中旋转质量力偶矩的影响,引入车辆旋转质量换算系数δ,且根据国内道路设计规范,道路坡度在设计时一般设计值较小,因此设定cosθ≈1,sinθ≈tanθ=θ,车辆纵向动力学方程可写为:
19、
20、优选的,步骤s3具体如下:
21、将遗忘因子递归最小二乘法的车辆纵向动力学方程写为线性参数形式:
22、
23、在式(5)中,y为测量信息矩阵,φ为系数矩阵,为待估计参数;
24、将式(3)中各项带入线性参数形式得:
25、
26、在遗忘因子递归最小二乘估计中,线性模型的未知参数的选择是基于实际观测值和计算值之差平方和的最小值来选择的,这就代表未知参数的最优估计可以使以下损失函数的值最小:
27、
28、在式(7)中,n为数据总量,k为时刻,为便于计算根据式(3)将式(7)写为如下形式:
29、
30、在式(8)中,k-1为k的前一时刻,l(k)为:
31、l(k)=p(k-1)φ(k)(λ+φt(k)p(k-1)φ(k))-1 (9)
32、p(k)为:
33、
34、在本步骤中,将质量与坡度解耦,通过遗忘因子加强历史数据的影响,从而提高稳变量质量的估计精度,且忽略对时变量的估计结果,得到估计结果从而可计算出车辆整车质量m。
35、优选的,步骤s4具体如下:
36、自适应卡尔曼滤波估计道路坡度,并将步骤s3所得车辆整车质量m作为输入参数之一,根据车辆纵向动力学方程,卡尔曼滤波需根据动力学方程建立系统状态空间方程,选取车辆行驶速度v、道路坡度θ为状态变量,则系统状态向量为:
37、
38、在式(11)中,xk为系统k时刻的状态向量,vk为车辆k时刻的行驶速度,θk为k时刻的道路坡度;
39、在车辆行驶时,道路坡度的变化幅度较小,所以坡度对时间的导数可近似为0,根据式(4)可得到如下微分方程:
40、
41、在式(12)中,为车辆在k时刻的加速度,tk为k时刻的驱动电机转矩,mk为k时刻的车辆整车质量;
42、在车辆低速行驶和起步过程中空气阻力影响较低可视为0,则式(12)可改为:
43、
44、离散后得到下式:
45、
46、在式(14)中,δt为数据采样间隔,此处为0.1秒;
47、系统状态方程为:
48、
49、在式(15)中,qk-1为k-1时刻的状态估计噪声;
50、系统观测方程为:
51、z(tk)=hx(tk)+rk-1 (16)
52、在式(16)中,h为观测矩阵,rk-1为k-1时刻的观测噪声;
53、滤波时间更新方程为:
54、
55、
56、在式(17)、(18)中,为先验状态,为先验协方差矩阵,a为状态转移矩阵;为k时刻的先验协方差矩阵;qk-1为状态估计过程中k-1时刻的噪声协方差矩阵;
57、测量更新方程为:
58、
59、在式(19)中,εk为k时刻的残差,zk为k时刻的观测值,kk为k时刻的卡尔曼增益,rk-1为k-1时刻观测噪声的协方差矩阵,i为单位矩阵,x为后验状态,p为后验协方差矩阵;
60、自适应卡尔曼滤波引入了带有遗忘因子的噪声估计,噪声估计器为:
61、
62、在式(20)中,dk-1为k-1时刻的加权系数,b为遗忘因子,此处取值为0.98。
63、本发明的有益效果是:
64、本方法可低成本、精确的估计起步时整车质量和道路坡度,混合算法使用递归最小二乘法优先估计车辆质量,再将估计的质量作为道路坡度估计的输入参数之一,进而对道路坡度进行估计,该算法用于纯电动汽车起步阶段,解决了现有技术中基于额外传感器的方法,较为依赖传感器的精度且会增加车辆制造成本,而基于车辆纵向动力学的方法,单一算法估计两种变化性质不同的参数估计结果较差的问题。
- 还没有人留言评论。精彩留言会获得点赞!