用以估计电动车辆(EV)的负载参数的控制器及其方法与流程
本发明涉及一种用以估计电动车辆(ev)的负载参数的控制器及其方法。
背景技术:
1、现有的车辆重量检测方法采用对传感器的使用来检测附加的参数,从而增加了附加的成本、硬件单元和复杂性,并且尚未针对两轮电动车辆或其他车辆投入使用。
2、专利文献us2016355189公开了一种用于车辆负载检测和响应的系统和方法。负载的转矩-速度曲线或数据被用作标准以确定电动车辆正在其中操作的外部条件,诸如斜坡或无斜坡、逆风或无逆风、高温或低温。系统将负载数据的实际转矩-速度的样本与标准进行比较。基于该比较,系统确定外部条件(爬上坡、逆风行驶、在高温下操作)或车辆动力系统的异常操作,例如低胎压、增加的摩擦、车轮未对准。基于该确定,系统采取行动来管控马达的最大转矩输出,以控制车辆电池的温度;升高挡风板;管控车辆的最大速度以减少由低胎压、增加的动力系统摩擦或车轮未对准造成的危险;或发起异常条件的指示。
技术实现思路
技术特征:
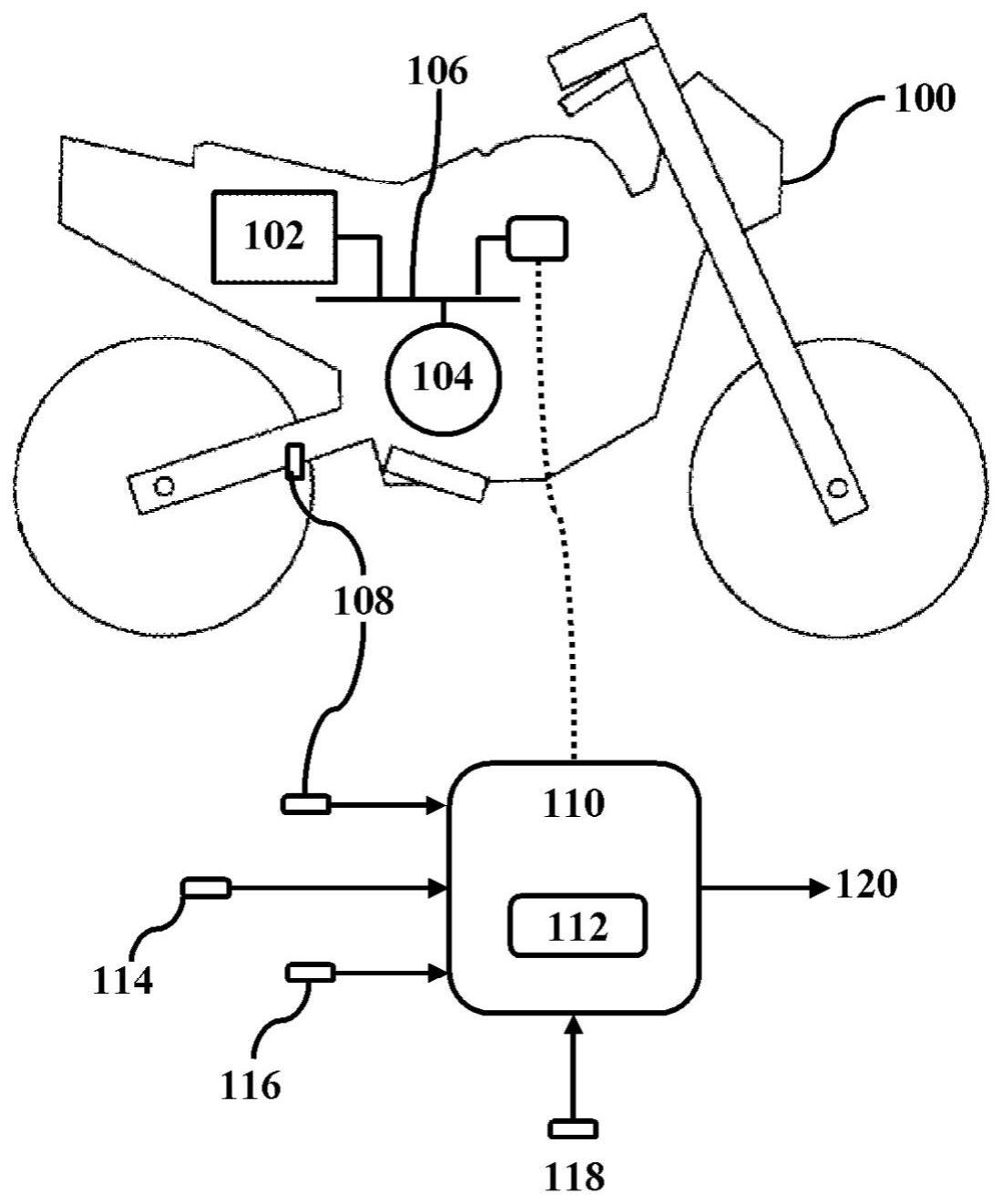
1.一种用以估计电动车辆(ev)(100)的负载参数(120)的控制器(110),所述ev(100)配备有部件,包括用以驱动所述ev(100)的至少一个旋转电机(104)、用以向所述旋转电机(104)以及可选地向所述ev(100)的附件供应电能的至少一个电池组(102),所述控制器(110)和所述部件的控制单元通过所述ev(100)的控制器局域网(can)106连接,所述控制器(110)被构造成:
2.根据权利要求1所述的控制器(110),其中,所述主要参数是选自包括车辆速度、车辆加速度和节气门位置的组中的至少一者,并且所述次要参数是选自包括以下各者的组中的至少一者:由所述旋转电机(104)汲取的相电流、从所述至少一个电池组(102)供应到所述旋转电机(104)的电池电流、由所述旋转电机(104)施加的转矩、由所述旋转电机(104)消耗的功率(电气/机械的)、电池功率及其组合,其中,所述次要参数还能够选自电池电压以及所述旋转电机(104)的效率。
3.根据权利要求1所述的控制器(110),其中,所述负载参数(120)用于选自包括以下各者的组中的至少一者:针对当前行程的所述ev(100)的续航里程的估计、所述ev(100)的滥用的估计、所述ev(100)的零件和部件的老化的估计、基于能耗的支付模型的实现、基于估计的重量用于从所述ev(100)提取更高效率的最佳操作点的选择、当在坡度上驾驶时更好的加速和驾驶品质的实现、用估计的坡度增强坡保持和坡辅助特征、基于估计的重量和坡度对最佳制动力的调制和分配、基于估计的重量对悬架的调节、基于估计的重量对胎压的调节、对所述ev(100)的有效负载的分类、车轮之间的转矩协调/调制等。
4.根据权利要求1所述的控制器(110),其中,使用以下各者中的任一者但不限于以下各者来开发和预训练所述负载模型(112):高斯过程数据模型、线性模型、多项式模型、回归模型、参数估计、曲线拟合、最小均方误差(lmse)、递归最小平方近似、误差平方和(sse)、绝对误差、机器学习(ml)模型、深度学习(dl)模型、自学习模型及其组合。
5.根据权利要求1所述的控制器(110),其中,当所述道路坡度被确定为零时,所述控制器(110)被构造成:
6.一种用于估计电动车辆(ev)(100)的负载参数(120)的方法,所述ev(100)配备有部件,包括用以驱动所述ev(100)的至少一个旋转电机(104),以及用以向所述旋转电机(104)和所述ev(100)的附件供应电能的至少一个电池组(102),所述控制器(110)和所述部件的控制单元通过所述ev(100)的控制器局域网(can)(106)连接,所述方法包括以下步骤:
7.根据权利要求6所述的方法,其中,所述主要参数是选自包括车辆速度、车辆加速度和节气门位置的组中的至少一者,并且所述次要参数是选自包括以下各者的组中的至少一者:由所述旋转电机(104)汲取的相电流、从所述至少一个电池组(102)供应到所述旋转电机(104)的电池电流、由所述旋转电机(104)施加的转矩、由所述旋转电机(104)消耗的功率(电气/机械的)、电池功率及其组合,其中,所述次要参数还能够选自电池电压以及所述旋转电机(104)的效率。
8.根据权利要求6所述的方法,其中,所述负载参数(120)用于选自包括以下各者的组中的至少一者:针对当前行程估计所述ev(100)的续航里程、估计所述ev(100)的滥用、估计所述ev(100)的零件和部件的老化、实现基于能耗的支付模型、基于估计的重量选择用于从所述ev(100)提取更高效率的最佳操作点、当在坡度上驾驶时实现更好的加速和驾驶品质、用估计的道路坡度增强坡保持和坡辅助特征、基于估计的重量和道路坡度对最佳制动力进行调制和分配、基于估计的重量调节悬架、基于估计的重量调节胎压、对所述ev(100)的有效负载进行分类、车轮之间的转矩协调/调制等。
9.根据权利要求6所述的方法,其中,使用以下各者中的任一者但不限于以下各者来开发和预训练所述负载模型(112):高斯过程数据模型、线性模型、多项式模型、回归模型、参数估计、曲线拟合、最小均方误差(lmse)、递归最小平方近似、误差平方和(sse)、绝对误差、机器学习(ml)模型、深度学习(dl)模型、自学习模型及其组合。
10.根据权利要求6所述的方法,其中,当所述坡度为零时,所述方法包括:
技术总结
本发明涉及用以估计电动车辆(EV)的负载参数的控制器及其方法。一种电动车辆(100)配备有部件,包括用以驱动EV100的至少一个旋转电机104、用以供应电能的至少一个电池组102。控制器110和部件的控制单元通过EV100的CAN106连接。控制器110被构造成在行程期间从CAN106测量EV100的特性参数,其特征在于,控制器110被构造成基于测得的特性参数中的主要参数来检测EV100的至少一个准稳态条件,以及通过负载模型112处理测量的特性参数中的次要参数和EV100的空载重量以估计负载参数120。负载参数120是选自包括EV100的估计的重量和道路坡度的组中的至少一者。
技术研发人员:N·明努尔,P·纳加拉朱
受保护的技术使用者:罗伯特·博世有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!