一种基于道路风险和驾驶员行为的预警方法和系统
本发明涉及车辆控制,具体涉及一种基于道路风险和驾驶员行为的预警方法和系统。
背景技术:
1、随着社会的发展,城市公交和私家车成为人们出行的重要交通工具,随着道路车辆的急剧增加,由其引发的交通事故屡见不鲜,因此车辆的安全驾驶成为交通领域重要关注的部分。
2、行车危险预测作为实现智能车辆主动安全系统的关键部分,现有应用较广的预警变量主要包括车间时间、碰撞时间和车间距离等。而实际上,从行车风险形成开始到发生危险冲突的整个过程难以采用单一的预警参数进行模塑,需要采用更加复杂全面的模型进行研究。同时,目前现有的预警模型通常仅考虑车辆的运行特征,而忽略了实时的驾驶员行为、道路和环境的变化对行车风险状态的影响,不能全面刻画行车状态之间的内在演变规律,不利于行车风险的准确判断和精准预测。
3、因此,如何对驾驶环境和行车环境进行融合分析,并对行车风险进行准确判断和精准预测成为当前技术领域工作人员急需解决的问题。
技术实现思路
1、有鉴于此,有必要提供一种基于道路风险和驾驶员行为的预警方法和系统,以实现在对驾驶环境和行车环境进行融合分析,并对行车风险进行准确判断和精准预测的目的。
2、为了实现上述目的,本发明提供了一种基于道路风险和驾驶员行为的预警方法,包括:
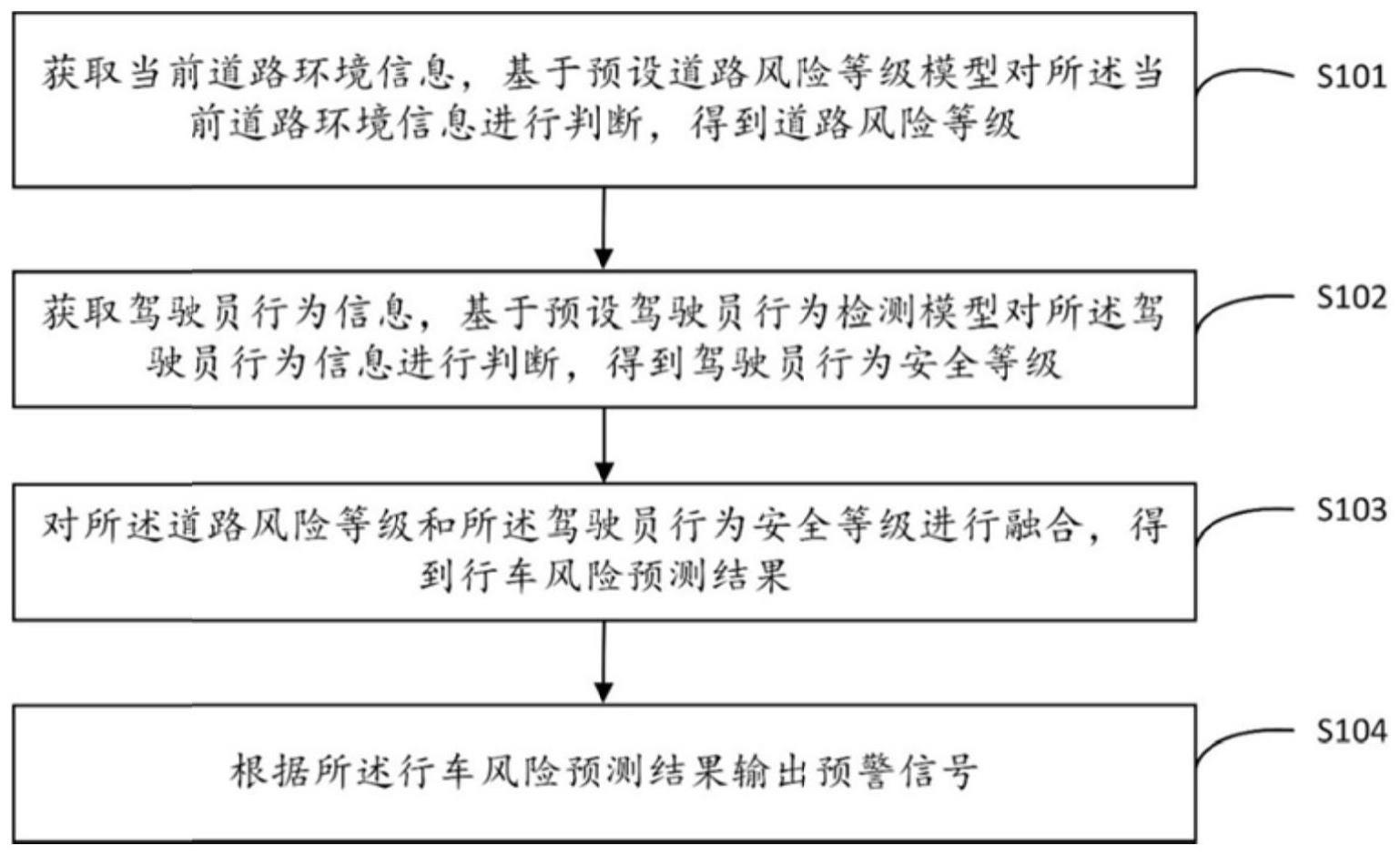
3、获取当前道路环境信息,基于预设道路风险等级模型对当前道路环境信息进行判断,得到道路风险等级;
4、获取驾驶员行为信息,基于预设驾驶员行为检测模型对驾驶员行为信息进行判断,得到驾驶员行为安全等级;
5、对道路风险等级和驾驶员行为安全等级进行融合,得到行车风险预测结果;
6、根据行车风险预测结果输出预警信号。
7、在一种可能的实现方式中,预设道路风险等级模型的建立方法包括:
8、获取目标道路的场景图像数据集,场景图像数据集包括与目标道路相匹配的天气数据、时间数据和交通状况数据;
9、基于交通事故数据库获取与目标道路对应的交通事故信息,得到目标交通事故信息,交通事故信息包括事故时间数据,事故地点数据,事故类型数据、事故严重程度数据、事故车辆数据和天气条件数据;
10、对场景图像数据集的道路情况信息进行位置和类别的标注,得到第一场景图像数据集,道路情况信息包括交通标志、人行横道、车辆、行人和交通信号灯;
11、将目标交通事故信息和场景图像数据集进行匹配,得到经过备注目标交通事故信息的道路风险等级数据库;
12、基于交通事故影响因素划分道路风险等级;
13、基于道路风险等级数据库和道路风险等级构建基于神经风险网络的道路风险模型。
14、在一种可能的实现方式中,将所述目标交通事故信息和场景图像数据集进行匹配,得到经过备注目标交通事故信息的道路风险等级数据库,具体为:
15、采用knn最近邻匹配算法对将目标交通事故信息和场景图像数据集进行匹配,得到经过备注目标交通事故信息的道路风险等级数据库。
16、在一种可能的实现方式中,交通事故影响因素包括交通事故信息、交通流量、道路类型、路段特征、交通信号灯、天气条件和视野能见度。
17、在一种可能的实现方式中,道路风险模型基于bp神经网络构建。
18、在一种可能的实现方式中,预设驾驶员行为检测模型使用经过训练的预训练的swin transformer作为编码器,并基于长短期记忆神经网络捕捉输入数据的上下文联系;
19、其中,编码器的内部引入可变性卷积,长短期记忆神经网络的输出上添加有全连接层和归一化函数,根据归一化函数进行驾驶员行为分类,使用线性层进行回归预测,得到驾驶员行为的预测结果。
20、在一种可能的实现方式中,利用预设预测模型将道路风险等级和驾驶员行为安全等级进行融合,得到行车风险预测结果的过程包括:
21、将道路风险等级和驾驶员行为安全等级分别输入预设预测模型的不同分支,得到道路风险等级特征和驾驶员行为安全等级特征;
22、利用预设预测模型的融合层对道路风险等级特征和驾驶员行为安全等级进行融合,得到融合特征;
23、将融合特征输入至预测结果层,得到形成风险预测结果。
24、在一种可能的实现方式中,道路风险等级包括高风险道路、中风险道路和低风险道路,驾驶员行为安全等级包括安全驾驶和不安全驾驶;
25、风险预测结果包括:不安全驾驶和高风险道路、不安全驾驶和中风险道路、不安全驾驶和低风险道路、安全驾驶和高风险道路、安全驾驶和中风险道路以及安全驾驶和低风险道路。
26、在一种可能的实现方式中,根据行车风险预测结果输出预警信号,包括:
27、在不安全驾驶和高风险道路情况下,输出紧急语音警示信号并显示红色警示信号;
28、在不安全驾驶和中风险道路情况下,输出语音警示信息并显示黄色预警信号;
29、在不安全驾驶和低风险道路情况下,输出语音预警警示信息;
30、在安全驾驶和高风险道路情况下,输出语音道路预警信号并显示红色提醒信号;
31、在安全驾驶和中风险道路情况下,输出语音道路警示信号并显示黄色提醒信号;
32、在安全驾驶和低风险道路情况下,显示提醒信号。
33、为了实现上述目的,本发明还提供了一种基于道路风险和驾驶员行为的预警系统,包括:
34、道路风险等级模块,用于获取当前道路环境信息,基于预设道路风险等级模型对当前道路环境信息进行判断,得到道路风险等级;
35、驾驶员行为信息模块,用于获取驾驶员行为信息,基于预设驾驶员行为检测模型对驾驶员行为信息进行判断,得到驾驶员行为安全等级;
36、预测模块,用于对道路风险等级和驾驶员行为安全等级进行融合,得到行车风险预测结果;
37、输出模块,用于根据行车风险预测结果输出预警信号。
38、采用上述实施例的有益效果为:首先获取当前道路环境信息,基于预设道路风险等级模型对当前道路环境信息进行判断,得到道路风险等级;获取驾驶员行为信息,基于预设驾驶员行为检测模型对驾驶员行为信息进行判断,得到驾驶员行为安全等级;对道路风险等级和驾驶员行为安全等级进行融合,得到行车风险预测结果;根据行车风险预测结果输出预警信号。本发明通过深度学习模型将车内驾驶员行为和道路风险进行融合,能够更加全面的对行车风险进行精准预测和对应提醒,有助于提高行车安全性。
技术特征:
1.一种基于道路风险和驾驶员行为的预警方法,其特征在于,包括:
2.根据权利要求1所述的基于道路风险和驾驶员行为的预警方法,其特征在于,所述预设道路风险等级模型的建立方法包括:
3.根据权利要求2所述的基于道路风险和驾驶员行为的预警方法,其特征在于,所述将所述目标交通事故信息和所述场景图像数据集进行匹配,得到经过备注所述目标交通事故信息的道路风险等级数据库,具体为:
4.根据权利要求2所述的基于道路风险和驾驶员行为的预警方法,其特征在于,所述交通事故影响因素包括交通事故信息、交通流量、道路类型、路段特征、交通信号灯、天气条件和视野能见度。
5.根据权利要求2所述的基于道路风险和驾驶员行为的预警方法,其特征在于,所述道路风险模型基于bp神经网络构建。
6.根据权利要求5所述的基于道路风险和驾驶员行为的预警方法,其特征在于,所述预设驾驶员行为检测模型使用经过训练的预训练的swin transformer作为编码器,并基于长短期记忆神经网络捕捉输入数据的上下文联系;
7.根据权利要求1所述的基于道路风险和驾驶员行为的预警方法,其特征在于,基于预设预测模型将所述道路风险等级和驾驶员行为安全等级进行融合,所述得到行车风险预测结果的过程包括:
8.根据权利要求1所述的基于道路风险和驾驶员行为的预警方法,其特征在于,所述道路风险等级包括高风险道路、中风险道路和低风险道路,所述驾驶员行为安全等级包括安全驾驶和不安全驾驶;
9.根据权利要求8所述的基于道路风险和驾驶员行为的预警方法,其特征在于,所述根据所述行车风险预测结果输出预警信号,包括:
10.一种基于道路风险和驾驶员行为的预警系统,其特征在于,包括:
技术总结
本发明提供了一种基于道路风险和驾驶员行为的预警方法和系统,该方法包括:获取当前道路环境信息,基于预设道路风险等级模型对所述当前道路环境信息进行判断,得到道路风险等级;获取驾驶员行为信息,基于预设驾驶员行为检测模型对驾驶员行为信息进行判断,得到驾驶员行为安全等级;对道路风险等级和驾驶员行为安全等级进行融合,得到行车风险预测结果;根据行车风险预测结果输出预警信号。本发明通过深度学习模型将车内驾驶员行为和道路风险进行融合,能够更加全面的对行车风险进行精准预测和对应提醒,有助于提高行车安全性。
技术研发人员:陈运星,崔军华,吴钊,吴华伟,魏长银
受保护的技术使用者:湖北文理学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!