一种车辆原地旋转控制方法、控制系统及车辆与流程
本发明涉及车辆控制,尤其涉及一种车辆原地旋转控制方法、控制系统及车辆。
背景技术:
1、在车辆生产行业,通常使用“转弯半径”来评价车辆转弯控制能力的优劣。转弯半径,是指当车辆的方向盘转到极限位置时,旋转中心到前外旋转轮接地中心的距离。转弯半径反映了车辆通过最小曲率半径弯曲道路的能力和在狭窄路面上调头行驶的能力。转弯半径越小,车辆通过狭窄弯曲地带或绕开不可越过的障碍物的能力就越强,也就越灵活。
2、而在车辆转弯控制中,原地旋转控制是其中比较特殊的存在。
3、现有技术中的原地旋转控制,通过制动某个车轮或是计算扭矩控制,促使车辆在原地围绕质心位置进行旋转。
4、从理论上来说,由于车辆的质心位置和几何中心位置重叠,因此现有技术中的原地旋转控制的转弯半径应当为最小转弯半径。但在实际使用中发现,由于车辆由大量零件组装而成,车辆的质心位置相对于几何中心位置会发生偏移,因此现有技术的原地旋转控制的转弯半径实际并不是最小转弯半径。
技术实现思路
1、本发明实施例通过提供一种车辆原地旋转控制方法、控制系统、介质及车辆,解决了现有技术中车辆原地旋转,无法使转弯半径达到最小值的技术问题,实现了让车辆的转弯半径达到最小值,提高机动性的技术效果。
2、为解决上述技术问题,本发明的提供了如下技术方案:
3、第一方面,本发明公开了一种车辆原地旋转控制方法,包括:
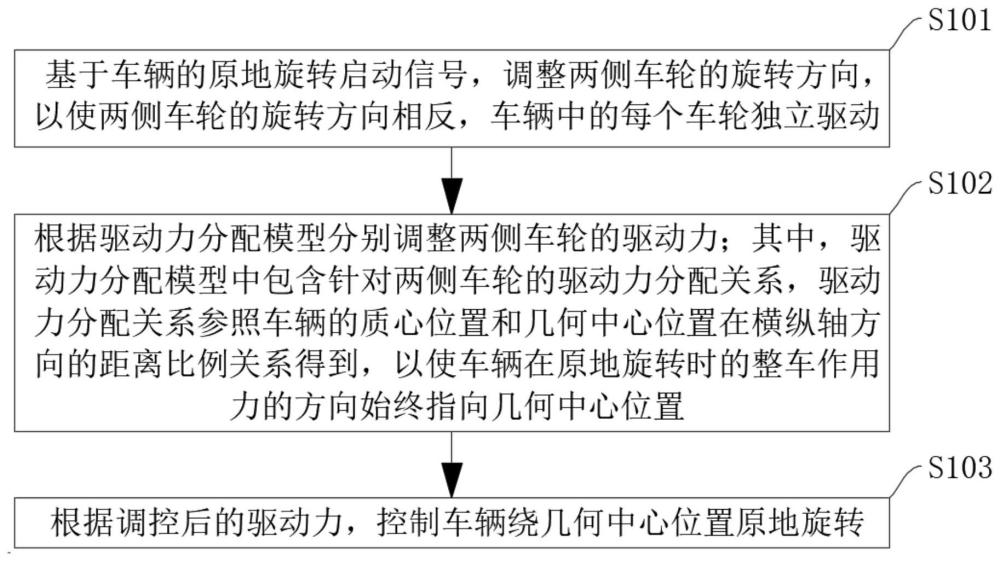
4、基于上述车辆的原地旋转启动信号,调整两侧车轮的旋转方向,以使上述两侧车轮的旋转方向相反;上述车辆中的每个车轮独立驱动;
5、根据驱动力分配模型分别调整上述两侧车轮的驱动力;其中,上述驱动力分配模型中包含针对上述两侧车轮的驱动力分配关系,上述驱动力分配关系参照上述车辆的质心位置和几何中心位置在横纵轴方向的距离比例关系得到,以使上述车辆在原地旋转时的整车作用力的方向始终指向上述几何中心位置;
6、根据调控后的上述驱动力,控制上述车辆绕上述几何中心位置原地旋转。
7、可选的,上述驱动力分配模型按照下述步骤构建:
8、根据上述车辆的载荷和车辆尺寸,计算上述车辆的质心位置;
9、基于上述质心位置和上述几何中心位置,确定上述距离比例关系;
10、确定地面对于上述车辆的横向作用力和纵向作用力;其中,上述横向作用力用于表征地面相对于上述车辆的四轮摩擦力关系,上述纵向作用力用于表征上述车辆的四轮驱动力关系,上述横向作用力和上述纵向作用力合并为上述整车作用力;
11、利用上述距离比例关系,约束上述横向作用力和上述纵向作用力,得到上述驱动力分配模型;其中,上述驱动力分配模型满足:上述横向作用力和上述纵向作用力的作用力比例关系等于上述距离比例关系,以使上述整车作用力的方向始终指向上述几何中心位置。
12、可选的,上述驱动力分配模型具体为:
13、
14、其中,fd_l为一侧车轮合力,fd_r为另一侧车辆合力,l为轴距,为上述质心位置相对于上述几何中心位置的纵向距离,xcg为上述质心位置相对于上述几何中心位置的横向距离,∑fx为横向作用力。
15、可选的,上述得到上述驱动力分配模型之后,上述方法还包括:
16、利用原地匀速旋转条件对上述驱动力分配模型进行优化,得到驱动力分配优化模型;上述驱动力分配优化模型用于控制控制上述车辆围绕上述几何中心位置进行原地匀速旋转;上述原地匀速旋转条件为:上述车辆的阻力矩等于驱动力矩。
17、可选的,上述驱动力分配优化模型为:
18、
19、
20、其中,fd_l为一侧车轮合力,fd_r为另一侧车辆合力,tf为车辆的阻力矩,b为轮距,l为轴距,为上述质心位置相对于上述几何中心位置的纵向距离,xcg为上述质心位置相对于上述几何中心位置的横向距离,∑fx为横向作用力。
21、第二方面,本发明公开了一种车辆原地旋转控制系统,包括:
22、启动模块,基于上述车辆的原地旋转启动信号,调整两侧车轮的旋转方向,以使上述两侧车轮的旋转方向相反;上述车辆中的每个车轮独立驱动;
23、调整模块,用于根据驱动力分配模型分别调整上述两侧车轮的驱动力;其中,上述驱动力分配模型中包含针对上述两侧车轮的驱动力分配关系,上述驱动力分配关系参照上述车辆的质心位置和几何中心位置在横纵轴方向的距离比例关系得到,以使上述车辆在原地旋转时的整车作用力的方向始终指向上述几何中心位置;
24、控制模块,用于根据调控后的上述驱动力,控制上述车辆绕上述几何中心位置原地旋转。
25、第三方面,本发明公开了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面上述方法对应的步骤。
26、第四方面,本发明公开了一种车辆,包括:车辆主体、设置上述车辆主体内分别驱动车轮的多个电机、存储器、处理器及存储在上述存储器上并可在上述处理器上运行的车辆控制程序,上述车辆控制程序被上述处理器执行时,通过控制上述电机实现如第一方面上述方法对应的步骤。
27、可选的,上述车辆还包括:
28、开关,用于根据用户触发操作进行通电或断电;
29、上述整车控制器,还用于响应于上述开关的通电信号,控制上述车辆绕上述几何中心做圆周运动;或者响应于上述开关的断电信号,停止上述车辆的旋转。
30、可选的,上述开关与上述车辆的油门联动,基于对上述油门行程控制上述开关。
31、本发明中提供的一个或多个技术方案,至少具有如下技术效果或优点:
32、本发明中的技术方案,首先采用每个车轮可以独立驱动的方式,分别控制车辆四轮的驱动力,由此对车辆原地旋转的精确控制提供硬件基础。在具体控制时,通过驱动力分配模型分别调整两侧车轮的驱动力,以使车辆在原地旋转时的整车作用力的方向始终指向几何中心位置,从而促使车辆在原地旋转时能够始终围绕几何中心位置旋转,实现车辆原地旋转达到最小转弯半径的技术效果,有效提高整车机动性。
技术特征:
1.一种车辆原地旋转控制方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述驱动力分配模型按照下述步骤构建:
3.如权利要求1或2所述的方法,其特征在于,所述驱动力分配模型具体为:
4.如权利要求3所述的方法,其特征在于,所述得到所述驱动力分配模型之后,所述方法还包括:
5.如权利要求4所述的方法,其特征在于,所述驱动力分配优化模型为:
6.一种车辆原地旋转控制系统,其特征在于,所述系统包括:
7.一种可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1~5任一权项所述的车辆原地旋转控制方法。
8.一种车辆,其特征在于,所述车辆包括:
9.如权利要求8所述的车辆,其特征在于,所述车辆还包括:
10.如权利要求9所述的车辆,其特征在于,所述开关与所述车辆的油门联动,基于对所述油门行程控制所述开关。
技术总结
本发明公开了一种车辆原地旋转控制方法、控制系统、介质及车辆,涉及车辆控制技术领域,包括:基于车辆的原地旋转启动信号,调整两侧车轮的旋转方向,以使两侧车轮的旋转方向相反;根据驱动力分配模型分别调整两侧车轮的驱动力;其中,驱动力分配模型中包含针对两侧车轮的驱动力分配关系,驱动力分配关系参照车辆的质心位置和几何中心位置在横纵轴方向的距离比例关系得到,以使车辆在原地旋转时的整车作用力的方向始终指向几何中心位置;根据调控后的驱动力,控制车辆绕几何中心位置原地旋转。实现让车辆绕几何中心位置旋转,实现最小转弯半径的技术效果,有效提高整车机动性。
技术研发人员:徐飞,雷雨,谢宇,李海波,朱海波
受保护的技术使用者:东风汽车集团股份有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!