车辆控制装置、车辆控制方法及其程序与流程
本发明涉及针对位于自身车辆前侧方的目标物执行用于降低自身车辆与该目标物过度接近的可能性的控制的车辆控制装置、车辆控制方法及其程序。
背景技术:
1、以往的车辆控制装置之一(以下,称为“现有装置”。)利用前方摄像头及前侧方雷达检测在自身车辆前方的中央区域及相对于该中央区域而位于侧方的区域(中央区域的左右端附近)存在的目标物。现有装置当判定为检测到的目标物与自身车辆有可能碰撞时,进行用于减轻碰撞受损的紧急行驶控制。
2、一般来说,驾驶员会较早地识别到位于自身车辆前方的中央区域的目标物。这样的目标物一般相对横向速度低。与此相对,驾驶员相对较晚地识别到要横穿自身车辆前方的位于自身车辆前侧方(前方且左右方向外侧)的目标物。这样的目标物一般相对横向速度高。于是,现有装置在目标物的相对横向速度为阈值以上的情况下,与该相对横向速度小于阈值的情况相比,更早地开始紧急行驶控制(参照专利文献1。)。
3、现有技术文献
4、专利文献
5、专利文献1:日本特开2022-60075号公报
技术实现思路
1、然而,要横穿自身车辆前方的目标物存在例如像行人及自行车等那样在自身车辆前侧方被检测到的当时处于停止(相对横向速度为零)但之后突然开始横穿的情况。在该情况下,由于在目标物被检测到的时间点该目标物的相对横向速度小于阈值,所以紧急行驶控制不会提前开始。因而,紧急行驶控制的执行有可能晚了。
2、本发明是为了解决上述课题而完成的。即,本发明的目的之一在于,提供一种车辆控制装置,针对位于自身车辆前侧方且驾驶员的识别倾向于晚的目标物,能够在更合适的时机开始用于应对该目标物的车辆控制。
3、为了达成上述目的,本发明的一方案具备:
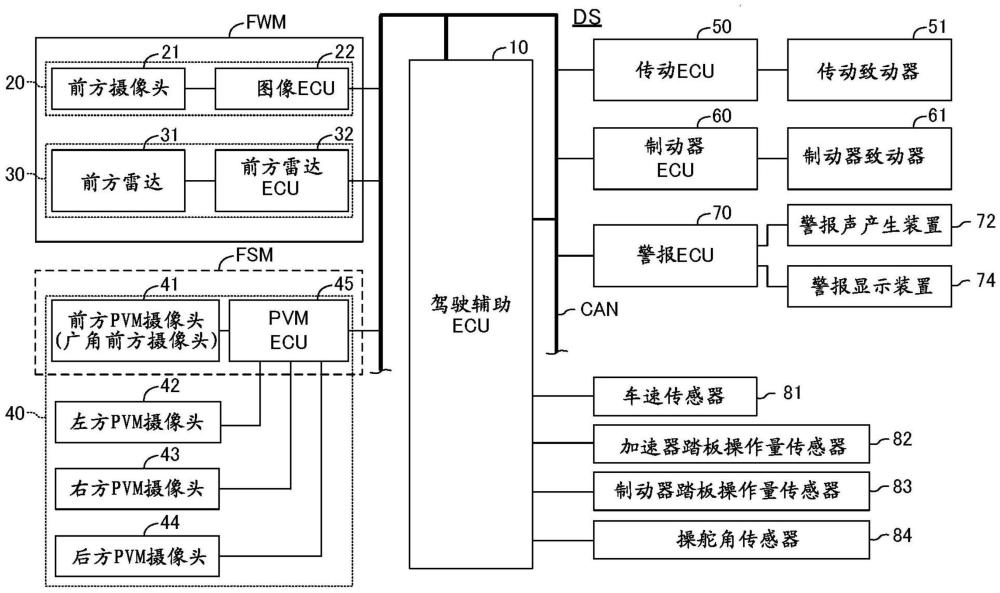
4、特定摄像头装置(fsm),能够取得前侧方目标物信息,所述前侧方目标物信息包含与位于前方监视装置(20,30,fwm)的目标物检测范围(fwa)的侧方且外侧的死角检测范围(daa)内的死角内目标物相关的信息,所述前方监视装置包括对自身车辆前方区域进行拍摄的具有第1水平视角(θf)的前方摄像头(21);和
5、控制器(10,50),在基于所述前侧方目标物信息判定为起步抑制条件成立时(步骤640至步骤660),与没有判定为所述起步抑制条件成立的情况相比,控制所述自身车辆的驱动力以使所述自身车辆的驱动力变小(步骤670,步骤740),所述起步抑制条件包含在与所述死角内目标物的类别相应的前侧方障碍物区域(例如,a2,a2及a3等)内存在该类别的目标物这一目标物条件(步骤640)。
6、根据该方案,在包含与通过前方监视装置无法检测到的死角内目标物的类别相应的前侧方障碍物区域内存在该类别的目标物这一目标物条件在内的起步抑制条件成立时,与起步抑制条件不成立时相比,自身车辆的驱动力降低。因此,能够在与位于自身车辆前侧方的目标物的类别相应的合适的时机执行降低驱动力的控制(作为用于应对该目标物的车辆控制的起步抑制控制)。
7、在本发明的一方案中,
8、所述控制器(10)构成为,
9、基于所述前侧方目标物信息确定所述死角内目标物的类别(步骤620),
10、基于所述前侧方目标物信息确定所述死角内目标物的移动状态(步骤625),
11、基于所述确定出的所述死角内目标物的类别及所述确定出的所述死角内目标物的移动状态决定所述前侧方障碍物区域(步骤630),
12、在基于所述前侧方目标物信息判定为在所述决定出的前侧方障碍物区域内存在与该前侧方障碍物区域对应的类别的目标物且是与该前侧方障碍物区域对应的移动状态所对应的(移动状态的)目标物的情况下,判定为所述目标物条件成立(步骤640)。
13、根据该方案,不仅根据死角内目标物的类别,还根据死角内目标物的移动状态来决定前侧方障碍物区域。例如,在目标物是行人的情况下,针对行人正在接近自身车辆的状态所决定的前侧方障碍物区域,与针对行人处于静止的状态所决定的前侧方障碍物区域相比,能够使自身车辆的横向的距离大。这样,根据上述方案,由于设定了与目标物的类别及移动状态相应的前侧方障碍物区域,所以能够根据目标物的类别及移动状态在更合适的时机执行降低驱动力的控制。此外,例如,目标物的类别是区分目标物是“行人、自行车及车辆(包括机动车及机动二轮车。)”中的哪一者的类别。目标物的移动状态例如是区分为静止状态、正在接近所述自身车辆的状态、除此以外的状态的状态。
14、本发明的一方案具备:
15、加速器踏板操作量传感器(82),检测所述自身车辆的加速器踏板操作量(ap);
16、车速传感器(81),检测所述自身车辆的速度即车速(spd);以及
17、传动致动器(51),用于变更所述自身车辆的驱动力。
18、进而,所述控制器(10)构成为,
19、在判定为所述目标物条件成立的情况下(步骤640),在所述检测到的车速(spd)为特定车速阈值(spdth)以下(步骤650)、且所述检测到的加速器踏板操作量(ap)为特定操作量阈值(低侧阈值aplοth)以上时(步骤660),判定为所述起步抑制条件成立(步骤670),
20、在没有判定为所述起步抑制条件成立的情况下,控制所述传动致动器以使所述驱动力成为所述检测到的加速器踏板操作量越大则越大的通常驱动力(步骤750),
21、在判定为所述起步抑制条件成立的情况下,控制所述传动致动器以使所述驱动力成为比所述通常驱动力小的驱动力(步骤740)。
22、根据该方案,在目标物条件成立的情况下,在车速相对低的状态下大幅踩踏了加速器踏板时,判定为起步抑制条件成立,控制传动致动器以使驱动力成为比通常驱动力小的驱动力。因此,在驾驶员未注意到死角内目标物而要使自身车辆起步的情况下,自身车辆的驱动力受到抑制,所以在死角内目标物要横穿自身车辆前方而移动到自身车辆前方时能够使自身车辆迅速停止。
23、在本发明的一方案中,
24、所述特定摄像头装置(fsm)构成为,
25、包括具有比所述前方摄像头的所述第1水平视角(θf)大的第2水平视角(θw)的前方广角摄像头(前方pvm摄像头41),基于所述前方广角摄像头取得的图像数据来取得所述前侧方目标物信息。
26、多数情况下,前方广角摄像头与其他广角摄像头一起为了生成车辆的俯瞰图像而被搭载。因此,根据上述方案,无需特别准备特定摄像头装置用的摄像头,就能够取得包含与死角内目标物相关的信息在内的前侧方目标物信息。
27、在本发明的一方案中,
28、所述控制器(10)构成为,
29、使用所述前方摄像头取得的图像数据来判定在所述自身车辆前方的预先设定的前方障碍物区域(a1)是否存在目标物(步骤510),
30、在判定为在所述前方障碍物区域存在目标物的情况下,在所述检测到的车速(spd)为所述特定车速阈值(spdth)以下(步骤520)、且所述检测到的加速器踏板操作量(ap)为比所述特定操作量阈值大的误起步操作量阈值(aphith)以上时(步骤530),判定为误起步抑制条件成立(步骤540),
31、在判定为所述误起步抑制条件成立的情况下,控制所述传动致动器以使所述驱动力成为比所述通常驱动力小的驱动力(步骤720)。
32、在基于前方摄像头取得的图像数据而在自身车辆的前方障碍物区域(a1)存在目标物的情况下,驾驶员一般会注意到该目标物,而不会大幅踩踏加速器踏板。然而,有可能发生驾驶员进行与制动器踏板之间弄错而踩踏加速器踏板的操作(误起步操作)的状况。根据上述方案,在车速(spd)为特定车速阈值(spdth)以下、且加速器踏板操作量(ap)为误起步操作量阈值(aphith)以上时,被判定为发生了这样的误起步操作,使驱动力降低。因此,能够事先避免自身车辆与位于自身车辆前方的目标物的碰撞。
33、在上述车辆控制装置的一方案中,
34、所述前方障碍物区域(a1)是在所述自身车辆的前后轴方向(x轴方向)前方具有长边方向的长方形的区域,所述长方形的短边方向的长度(y轴方向长度)是与所述自身车辆的车宽相应的值(2·d1),
35、所述控制器构成为,
36、在关于位于所述前方障碍物区域(a1)与所述死角检测范围(daa)之间的范围(a1与直线lfr之间的范围b)的中间目标物的信息包含于所述前侧方目标物信息的情况下,将所述中间目标物当作所述死角内目标物而判定所述目标物条件是否成立。
37、根据该方案,针对位于死角检测范围外的、前方障碍物区域的侧方且外侧的目标物,也能够执行起步抑制控制。
38、此外,本发明也涉及上述车辆控制装置实施的车辆控制方法及其程序。而且,在上述说明中,为了帮助理解发明,对于与实施方式对应的发明的构成要件,以写在括号内的方式添加了在实施方式中使用的附图标记。然而,本发明的各构成要件不限定于由所述附图标记规定的实施方式。
- 还没有人留言评论。精彩留言会获得点赞!