车辆控制方法、装置、终端设备以及存储介质与流程
本技术涉及汽车控制,尤其涉及一种车辆控制方法、装置、终端设备以及存储介质。
背景技术:
1、车辆通过桥梁伸缩缝、井盖或减速带等特殊路面时,容易误触发abs防抱死功能和tcs牵引力控制功能,进而导致车辆的巡航功能异常退出,影响驾驶安全。当前主要的桥梁道路均存在桥梁伸缩缝,桥梁伸缩缝如图1、图2、图3和图4所示。由于桥梁伸缩缝表面光滑,其表面摩擦系数与沥青路面等其他路面的摩擦系数存在明显差异。而传统的车辆的巡航控制功能,在进行车辆的自主加速控制时,并未考虑到桥梁伸缩缝与其他路面的差异,因此在较大的加速度请求下,车轮通过桥梁伸缩缝时,易导致相关功能的误触发,车辆巡航功能异常退出,无法继续保持车辆巡航功能运行时的加速或制动指令,存在安全隐患,影响驾驶体验。
2、因此,有必要提出一种能控制车辆在桥梁伸缩缝等特殊路面上的行驶方式,防止车辆巡航功能异常退出的方案。
技术实现思路
1、本技术的主要目的在于提供一种车辆控制方法、装置、终端设备以及存储介质,旨在解决现有的车辆控制方法不能准确控制车辆在桥梁伸缩缝等特殊路面上的行驶方式,导致车辆巡航功能异常退出的问题,提高车辆驾驶的安全性。
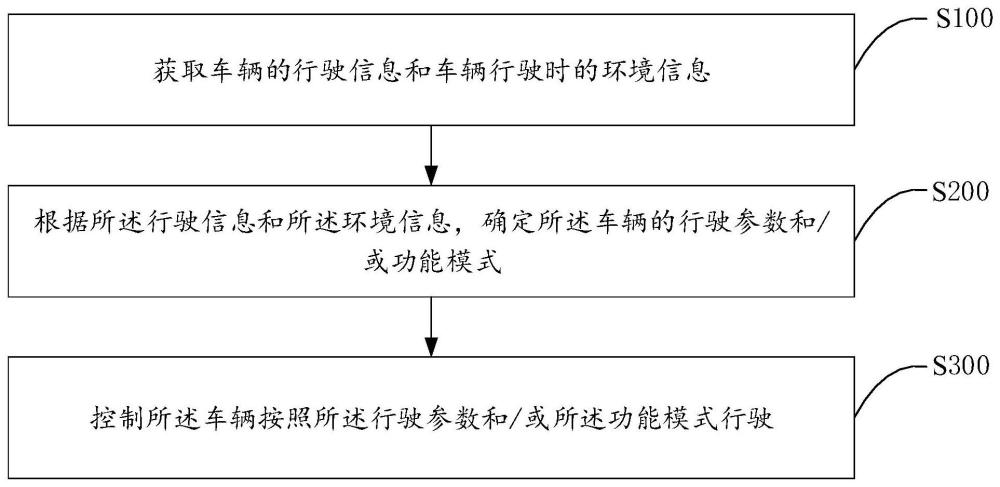
2、为实现上述目的,本技术提供一种车辆控制方法,所述车辆控制方法包括:
3、获取车辆的行驶信息和车辆行驶时的环境信息;
4、根据所述行驶信息和所述环境信息,确定所述车辆的行驶参数和/或功能模式;
5、控制所述车辆按照所述行驶参数和/或所述功能模式行驶。
6、可选地,所述行驶信息包括车辆实时位置和车辆实际速度,所述环境信息包括桥梁伸缩缝位置信息和桥梁伸缩缝宽度信息,所述根据所述行驶信息和所述环境信息,确定所述车辆的行驶参数和/或功能模式的步骤,包括:
7、获取车辆的型号参数,和/或防抱死功能激活信息和牵引力控制功能激活信息;
8、根据所述型号参数和所述车辆实时位置,确定车辆的车轮位置;
9、根据所述车轮位置、所述车辆实际速度、所述桥梁伸缩缝位置信息和所述桥梁伸缩缝宽度信息,计算车轮距离桥梁伸缩缝边缘的时距;
10、根据所述时距与预设的加速度控制时刻,确定车辆加速度值;和/或
11、根据所述时距、所述防抱死功能激活信息和所述牵引力控制功能激活信息,确定车辆巡航控制功能模式。
12、可选地,所述车轮位置包括车辆前轮位置和车辆后轮位置,所述根据所述车轮位置、所述车辆实际速度、所述桥梁伸缩缝位置信息和所述桥梁伸缩缝宽度信息,计算车轮距离桥梁伸缩缝边缘的时距的步骤,包括:
13、根据所述桥梁伸缩缝位置信息和所述车辆前轮位置,确定车辆前轮距离桥梁伸缩缝边缘的前轮边距;
14、根据所述桥梁伸缩缝位置信息和所述车辆后轮位置,确定车辆后轮距离桥梁伸缩缝边缘的后轮边距;
15、根据所述前轮边距和所述车辆实际速度,计算出车辆前轮距离桥梁伸缩缝近端边缘的前轮近端时距;
16、根据所述后轮边距和所述车辆实际速度,计算出车辆后轮距离桥梁伸缩缝近端边缘的后轮近端时距;
17、根据所述前轮边距、所述桥梁伸缩缝宽度信息和所述车辆实际速度,计算出车辆前轮距离桥梁伸缩缝远端边缘的前轮远端时距;
18、根据所述后轮边距、所述桥梁伸缩缝宽度信息和所述车辆实际速度,计算出车辆后轮距离桥梁伸缩缝远端边缘的后轮远端时距。
19、可选地,所述预设的加速度控制时刻包括加速度开始下降时刻和加速度结束下降时刻,所述加速度结束下降时刻小于所述加速度开始下降时刻,所述根据所述时距与预设的加速度控制时刻,确定车辆加速度值的步骤,包括:
20、将所述前轮近端时距与所述加速度开始下降时刻进行比较,获取比较结果;
21、若所述比较结果为所述前轮近端时距等于所述加速度开始下降时刻,则判断当前车辆加速值是否大于预设加速度值;
22、若当前车辆加速值大于预设加速度值,且未检测到车辆加速踏板的踩踏信号,则匀速降低车辆加速度值,直至所述车辆加速度值为所述预设加速度值,且所述前轮近端时距等于所述加速度结束下降时刻;
23、维持所述车辆加速度值为所述预设加速度值,直至所述后轮远端时距为零;
24、若当前车辆加速值小于或等于所述预设加速度值,或检测到车辆加速踏板的踩踏信号,则维持当前车辆加速值,直至所述后轮远端时距为零。
25、可选地,所述根据所述时距与预设的加速度控制时刻,确定车辆加速度值的步骤,包括:
26、若所述比较结果为所述前轮近端时距大于所述加速度开始下降时刻,则维持当前车辆加速值。
27、可选地,所述防抱死功能激活信息包括四个车轮独立的防抱死功能激活信息,所述牵引力控制功能激活信息包括四个车轮独立的牵引力控制功能激活信息,所述根据所述时距、所述防抱死功能激活信息和所述牵引力控制功能激活信息,确定车辆巡航控制功能模式的步骤包括:
28、在所述前轮近端时距为零至所述前轮远端时距为零时,若有任意一个前轮触发所述防抱死功能激活信息或所述牵引力控制功能激活信息,且另一前轮和两个后轮未触发所述防抱死功能激活信息或所述牵引力控制功能激活信息,则所述车辆巡航控制功能不退出;或
29、若两个前轮触发所述防抱死功能激活信息或所述牵引力控制功能激活信息,且两个后轮未触发所述防抱死功能激活信息或所述牵引力控制功能激活信息,则所述车辆巡航控制功能不退出;或
30、若两个前轮未触发所述防抱死功能激活信息或所述牵引力控制功能激活信息,且任意一个后轮触发所述防抱死功能激活信息或所述牵引力控制功能激活信息,则所述车辆巡航控制功能退出。
31、可选地,所述防抱死功能激活信息包括四个车轮独立的防抱死功能激活信息,所述牵引力控制功能激活信息包括四个车轮独立的牵引力控制功能激活信息,所述根据所述时距、所述防抱死功能激活信息和所述牵引力控制功能激活信息,确定车辆巡航控制功能模式的步骤包括:
32、在所述后轮近端时距为零至所述后轮远端时距为零时,若有任意一个后轮触发所述防抱死功能激活信息或所述牵引力控制功能激活信息,且另一后轮和两个前轮未触发所述防抱死功能激活信息或所述牵引力控制功能激活信息,则所述车辆巡航控制功能不退出;或
33、若两个后轮触发所述防抱死功能激活信息或所述牵引力控制功能激活信息,且两个前轮未触发所述防抱死功能激活信息或所述牵引力控制功能激活信息,则所述车辆巡航控制功能不退出;或
34、若两个后轮未触发所述防抱死功能激活信息或所述牵引力控制功能激活信息,且任意一个前轮触发所述防抱死功能激活信息或所述牵引力控制功能激活信息,则所述车辆巡航控制功能退出。
35、本技术实施例还提出一种车辆控制装置,所述车辆控制装置包括:
36、获取模块,用于获取车辆的行驶信息和车辆行驶时的环境信息;
37、行驶方式确定模块,用于根据所述行驶信息和所述环境信息,确定所述车辆的行驶参数和/或功能模式;
38、控制模块,用于控制所述车辆按照所述行驶参数和/或所述功能模式行驶。
39、本技术实施例还提出一种终端设备,所述终端设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的车辆控制程序,所述车辆控制程序被所述处理器执行时实现如上所述的车辆控制方法的步骤。
40、本技术实施例还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有车辆控制程序,所述车辆控制程序被处理器执行时实现如上所述的车辆控制方法的步骤。
41、本技术实施例提出的车辆控制方法、装置、终端设备以及存储介质,通过获取车辆的行驶信息和车辆行驶时的环境信息;根据所述行驶信息和所述环境信息,确定所述车辆的行驶参数和/或功能模式;控制所述车辆按照所述行驶参数和/或所述功能模式行驶。根据所获取的车辆行驶信息和环境信息,可以更准确地了解车辆当前的行驶状态,并确定对应于环境信息的行驶需求,从而对车辆行驶方式进行相应的控制和调整,实现智能化的车辆控制,提高车辆行驶的安全性和稳定性,改善用户驾驶体验。
- 还没有人留言评论。精彩留言会获得点赞!