一种基于5G的AGV运输车的制作方法
一种基于5g的agv运输车
技术领域
1.本实用新型涉及自动化搬运车技术领域,特别涉及一种基于5g的agv运输车。
背景技术:
2.agv运输车全称为无人搬运车,指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,工业应用中不需驾驶员的搬运车,以可充电蓄电池为其动力来源。一般可通过电脑来控制其行进路线以及行为,或利用电磁轨道来设立其行进路线。
3.但是现有的agv运输车在使用的时候没有设置较好的防护装置,这样在运动的过程中可能会导致搬运的物品出现散落的现象。
4.因此,有必要提供一种基于5g的agv运输车解决上述技术问题。
技术实现要素:
5.本实用新型的目的在于提供一种基于5g的agv运输车,以解决上述背景技术中的在搬运的过程中物品会出现散落的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种基于5g的agv运输车,包括机架,所述机架内部上方两侧各设置有一个防护机构,所述机架与防护机构通过螺栓固定连接,所述机架的内部下方设置有传动机构,所述机架的运行方向前端设置有避障机构。
7.所述防护机构是由防护板、侧板、传动轴与气缸组件组成,所述传动轴安装在气缸组件的上方轴心处,所述侧板安装在传动轴的上方,所述防护板安装在侧板的一侧。
8.作为本实用新型的进一步方案,所述机架的内部设置有5g模块,且5g模块的内部设置有信号接收芯片、信号处理芯片与信号传输芯片。
9.作为本实用新型的进一步方案,所述传动机构是由脚轮、电机、车载控制模块、电磁传感器、电池组与框架组成,所述车载控制模块安装在框架的内部轴心处,所述电池组安装在车载控制模块的下方,所述电磁传感器安装在车载控制模块的两侧,所述脚轮安装在框架内部四角处,所述电机分别安装在与脚轮和框架的相交处。
10.作为本实用新型的进一步方案,所述机架的上端表侧安装有防滑垫。
11.作为本实用新型的进一步方案,所述机架靠近避障机构一侧的上方依次设置有启动按键、信息显示屏与若干个操作按键。
12.作为本实用新型的进一步方案,所述防护板的形状为长方形。
13.作为本实用新型的进一步方案,所述电机与脚轮的相交处设置有减速器,且减速器固定在框架一侧。
14.作为本实用新型的进一步方案,所述避障机构共设置有两个,且分别通过螺栓固定连接。
15.与现有技术对比,本实用新型具备以下有益效果:
16.本实用新型中通过在机架的上端两侧各设置有一个防护机构,并且防护机构可以
通过内部的气缸组件将侧板运动到机架的上端形成第二形态,以对待运输的物品起到防护的作用,避免了物品出现散落的现象,且在防护机构的侧面设置有防护板,这样可以在防护板的作用下对物品表面起到防护的作用,以防止损伤物品表面,同时在机架的上侧表端设置有防滑垫,在防滑垫的作用下避免物品在运输过程中出现滑动的现象。
17.本实用新型中采用了5g的新型信息通信技术agv,不仅做到了在传输速度上的提高,在传输的稳定性上也有突出的进步,通过采用了5g的新型信息通信技术,加强了agv机器人协同能力,5g为agv机器人之间的通信提供高速网络支持,使agv机器人具备自组织与协同能力。
附图说明
18.下面结合附图和实施例对本实用新型进一步说明。
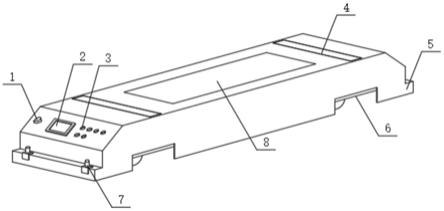
19.图1是本实用新型的基于5g的agv运输车第一形态结构示意图;
20.图2是本实用新型的基于5g的agv运输车第二形态结构示意图;
21.图3是本实用新型的防护机构正视结构示意图;
22.图4是本实用新型的传动机构俯视结构示意图;
23.图5是本实用新型的基于5g的agv运输车的流程结构示意图。
24.图中:1、启动按键;2、信息显示屏;3、操作按键;4、防护机构;41、防护板;42、侧板;43、传动轴;44、气缸组件;5、机架;6、传动机构;61、脚轮;62、电机;63、车载控制模块;64、电磁传感器;65、电池组;66、框架;7、避障机构;8、防滑垫。
具体实施方式
25.【实施例1】,如图1和图2所示,一种基于5g的agv运输车,包括机架5,机架5内部上方两侧各设置有一个防护机构4,机架5与防护机构4通过螺栓固定连接,机架5的内部下方设置有传动机构6,机架5的运行方向前端设置有避障机构7;
26.防护机构4是由防护板41、侧板42、传动轴43与气缸组件44组成,传动轴43安装在气缸组件44的上方轴心处,侧板42安装在传动轴43的上方,防护板41安装在侧板42的一侧。
27.具体使用时,可以将待运输的物品放置在防滑垫8的表端,启动设备后,气缸组件44带动侧板42运动到机架5的上方,从而在侧板42的作用下达到限位的作用,然后通过程序操控传动机构6运动,在传动机构6的作用下带动该agv小车运动,agv小车的运行路径通过平台服务器进行操控,并且在避障机构7的作用下可以提前对前进路径中的障碍物进行规避,同时5g模块的使用使得数据传输的更加便捷快速。
28.【实施例2】,如图1、图2和图5所示,机架5的内部设置有5g模块,且5g模块的内部设置有信号接收芯片、信号处理芯片与信号传输芯片。
29.5g模块内部的信号接收芯片、信号处理芯片与信号传输芯片之间通过电性连接。
30.5g模块与外部的数据传递通过5g信号传输。
31.5g模块安装在机架5的内部,且与车载控制模块63电性连接。
32.5g技术具有高速度、低延时、高续航等特点,采用了5g的新型信息通讯技术,能够使agv小车的数据互通及协同工作能力达到更高的水平。
33.具体使用时,通过机架5内部的5g模块进行信号的接收与发送,这样可以提高信号
的传输效率。
34.【实施例3】,如图4所示,传动机构6是由脚轮61、电机62、车载控制模块63、电磁传感器64、电池组65与框架66组成,车载控制模块63安装在框架66的内部轴心处,电池组65安装在车载控制模块63的下方,电磁传感器64安装在车载控制模块63的两侧,脚轮61安装在框架66内部四角处,电机62分别安装在与脚轮61和框架66的相交处。
35.电磁传感器64又叫电磁式传感器、磁电传感器等,电磁传感器64是把被测物理量转换为感应电动势的一种传感器,又称电磁感应式或电动力式传感器。
36.电磁传感器64主要是针对测速齿轮而设计的发电型传感器,将被测量在导体中感生的磁通量变化,转换成输出信号变化。
37.具体使用时,传动机构6内部的车载控制模块63通过程序的设定运动,带动电机62工作,电机62带动脚轮61旋转,从而可以使得在脚轮61的作用下该agv小车运动,同时通过电磁传感器64的作用下,可以使得更好的对agv小车进行操控。
38.【实施例4】,如图1和图2所示,机架5的上端表侧安装有防滑垫8。
39.具体使用时,在防滑垫8的作用下可以避免放置的物品出现滑动的现象。
40.【实施例5】,如图1和图2所示,机架5靠近避障机构7一侧的上方依次设置有启动按键1、信息显示屏2与若干个操作按键3。
41.避障机构7通过红外线的发射与传输可以检测到前方是否存在障碍物。
42.具体使用时,通过启动按键1打开该装置的电源,通过操作按键3进行程序的设定,并且信息显示屏2可以实时的显示出该装置的电压。
43.【实施例6】,如图3所示,防护板41的形状为长方形。
44.具体使用时,通过防护板41的缓冲作用下,避免了该物品出现碰撞的现象。
45.【实施例7】,如图4所示,电机62与脚轮61的相交处设置有减速器,且减速器固定在框架66一侧。
46.减速器在原动机和工作机或执行机构之间起匹配转速和传递转矩的作用,在现代机械中应用极为广泛。
47.减速器按用途可分为通用减速器和专用减速器两大类。
48.具体使用时,在减速器的作用下可以控制电机62的输出频率,从而可以使得传动的更加方便快捷。
49.【实施例8】,如图1和图2所示,避障机构7共设置有两个,且分别通过螺栓固定连接。
50.具体使用时,若是前方有障碍物,这时在避障机构7的作用下可以及时的探查到并且进行信号的传输。
51.工作原理:在使用的过程中,工作人员首先将该agv运输车进行程序的设定,当程序设定完成之后,使用者按下启动按键1,这样可以将该agv传输车通电,之后工作人员取出待要运输的物品,之后将物品放置在机架5的上端并且与防滑垫8相互接触,之后在程序的作用下,机架5内部的防护机构4就会进行运动;
52.防护机构4内部的气缸组件44运动,从而带动传动轴43上升,这样在传动轴43的作用下带动侧板42上升,这样在侧板42的作用下可以对防滑垫8表端的物品起到限位的作用,而且在侧板42的内部设置有防护板41,在防护板41的作用下避免了物品与侧板42直接接触
造成碰撞的现象;
53.之后传动机构6内部的车载控制模块63通过程序的设定运动,带动电机62工作,电机62带动脚轮61旋转,从而可以使得在脚轮61的作用下该agv小车运动,同时通过电磁传感器64的作用下,可以使得更好的对agv小车进行操控;
54.并且若是前方有障碍物,这时在避障机构7的作用下可以及时的探查到并且进行信号的传输,由于采用的为5g工业网关,这样可以使得信号传输的更快,从而在5g基站的接收下进行信号的发送,这样可以快速的控制该传动机构6运动,避免出现碰撞的现象发生,这样就完成了该agv小车的使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1