一种无人驾驶线控底盘的后悬架结构的制作方法
1.本实用新型属于智能驾驶技术领域,具体涉及一种无人驾驶线控底盘的后悬架结构。
背景技术:
2.汽车线控底盘后悬架通常由连杆、摆臂、弹簧、减震器、衬套、横向稳定杆等零件所组成。汽车线控底盘后悬架一般有扭力梁结构、多连杆结构、纵向钢板弹簧等形式,而且悬架系统通常与驱动系统是分别设计的两套机构,很难做到悬架系统和驱动系统的集成设计;目前的汽车线控底盘悬架系统由于设计安装、空间布置、悬架参数调整都很复杂且成本居高不下,并不适合无人驾驶线控底盘。为改善这些问题,本实用新型提出了一种无人驾驶线控底盘的后悬架结构。
技术实现要素:
3.本实用新型的目的在于提出一种无人驾驶线控底盘的后悬架结构,设计安装简单,便于调整悬架姿态参数,在车轮上下跳动时都能保持与较好的抓地力,简化悬架统的结构设计,降低成本。本实用新型另一个目的在于能够把驱动系统包括驱动轴、驱动电机一体化集成到后悬架中,提高线控驱动系统零件的防水防尘能力,且空间布置非常紧凑,方便大批量生产组装。
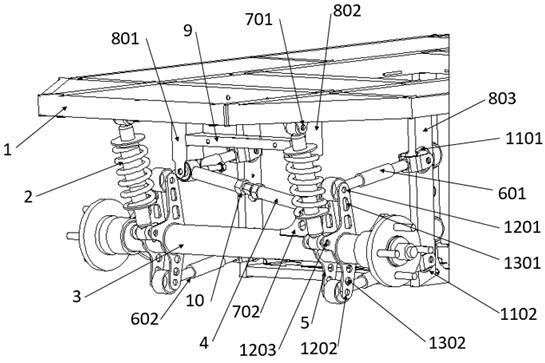
4.为实现上述目的,本实用新型提供如下技术方案:一种无人驾驶线控底盘的后悬架结构,包括:车架1,减震器总成2,驱动桥3,稳定杆4,连杆支架5,上连杆601,下连杆602;车架1由焊接连接的第一垂向支架801、第二垂向支架802、第三垂向支架803、横向支架9、第一附件701、第一衬套1101和第二衬套1102;减震器总成2由左右对称分布的一对减震器、弹簧组成,减震器总成2组装在车架1和连杆支架5之间,提供减震和支撑作用;稳定杆4布置在车架1和驱动桥3之间,在车辆遇到侧向冲击时,能提供对应的侧向支撑作用,提高车辆的侧向稳定性;连杆支架5左右对称固定在驱动桥3上,连杆支架5、第三垂向支架803、上连杆601和下连杆602形成四连杆机构,在实现约束车轮跳动功能的同时还可以大大缩短上连杆601和下连杆602的长度,提高车架1强度的功能。
5.进一步地,车架1上焊接工字形稳定支架,工字型稳定支架由第一垂向支架801、第二垂向支架802和横向支架9焊接而成。此结构加强了车架1的抗扭刚度和抗拉强度,在该线控底盘遇到横向冲击时,能显著提高车身的侧向稳定性。
6.进一步地,还包括轮毂轴承14、制动器支架16,驱动桥3包括驱动半轴15、驱动电机17、传动机构18和差速机构19;驱动桥3上还焊接有第二附件702,制动器支架16设置在驱动桥3两端;轮毂轴承14与驱动半轴15连接;传动机构18将驱动电机17的扭矩传递给差速机构19并进一步传递给左右两根驱动半轴15,从而驱动车辆行驶。
7.进一步地,上连杆601和下连杆602一端为u形,另一端为环形。连杆结构简单,组装方便,有效降低成本。
8.进一步地,连杆支架5上开有第一安装孔1201、第二安装孔1202、第三安装孔1203,一对第一减重孔1301和一对第二减重孔1302。零件集成度高,而且在车轮通过不平路面时,车轮的振动不会直接传递到车身,对车身及车内货物冲击较小。
9.进一步地,稳定杆4上设有螺母10,稳定杆4的一端与第一垂向支架801连接,另一端与第二附件702连接,能够调整底盘相对与车身的姿态,确保车轮两侧对称安装,能保证车辆行驶稳定性。
10.进一步地,减震器总成2的上端连接第一附件701,下端与第三安装孔1203相连。
11.进一步地,第一衬套1101、第二衬套1102焊接在第三垂向支架803上;上连杆601一侧连接第一衬套1101,另一侧连接第一安装孔1201上;下连杆602一侧连接第二衬套1102,另一侧连接在第二安装孔1202上。提高了车架1的刚性,又能增强第一衬套1101、第二衬套1102的耐久使用寿命。
12.与现有技术相比,本实用新型具有以下优点:
13.(1)车架1焊接了工字形稳定结构,加强了车架1的抗扭刚度和抗拉强度,在该线控底盘遇到横向冲击时,能显著提高车身的侧向稳定性。
14.(2)把连杆一端的衬套预先焊接在车架上,既提高了车架的刚性,又能增强衬套的耐久使用寿命。由于衬套预先集成在车架上,上连杆601和下连杆602端可以设计为u形,连杆结构简单,组装方便,有效降低成本。
15.(3)减震器总成2和连杆布置在车辆点头或后挫的纵向方向,能有效抑制减轻制动点头或加速后挫现象,车身姿态变化量比现有技术明显减少。
16.(4)稳定杆4、连杆支架5安装支架均焊接在驱动桥3上,相比现有技术,零件集成度高,而且在车轮通过不平路面时,车轮的振动不会直接传递到车身,对车身及车内货物或乘客冲击较小;稳定杆4上端连接在工字形的稳定支架上而不是直接连接在车身上,稳定杆的另一端连接在驱动桥3支架上,在车辆遇到侧向冲击时,传递到车身上的侧向冲击比现有技术要明显减轻;稳定杆5的调节螺母10,能够调整底盘相对与车身的姿态,确保车轮两侧对称安装,能保证车辆行驶稳定性。
17.(5)上连杆601、下连杆602、连杆支架5、第三垂向支架803形成了四连杆悬架结构。区别于现有技术通常在车辆横向方向布置的四连杆悬架,本实用新型的四连杆悬架结构在车辆纵向布置,因此车轮上下跳动时车轮外倾角不会变化,能确保在各种工况下轮胎都能有很好的抓地力,也不需要设置车轮前束角调整装置来补偿车轮外倾角的变化;另一个好处是,车轮在上下跳动时,车轮轮心位置在纵向方向几乎不变,车辆的轴距几乎不变,因此能提高车辆运动的稳定性和平顺性。
附图说明
18.为了更清楚地说明本实用新型的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
19.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术
上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容得涵盖的范围内。
20.图1是本实用新型专利的总成图。
21.图2是本实用新型一种无人驾驶线控底盘的后悬架结构的正视图。
22.图3是本实用新型一种无人驾驶线控底盘的后悬架结构的驱动桥结构图。
23.图4是本实用新型一种无人驾驶线控底盘的后悬架结构的驱动差速机构图。
24.附图标记:1-车架;2-减震总成;3-驱动桥;4-稳定杆;5-连杆支架;601-上连杆;602-下连杆;701-第一附件;702-第二附件;801-第一垂向支架;802-第二垂向支架;803-第二垂向支架;9-横向支架;10-螺母;1101-第一衬套;1102-第二衬套;1201-第一安装孔;1202-第二安装孔;1203-第三安装孔;1301-第一减重孔;1302-第二减重孔;14-轮毂轴承;15-驱动半轴;16-制动器支架;17-驱动电机;18-传动机构;19-差速机构。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.实施例一,参阅图1、图2、图3,本实用新型专利提供如下技术方案:一种无人驾驶线控底盘的后悬架结构,其特征在于,包括:车架1,减震器总成2,驱动桥3,稳定杆4,连杆支架5,上连杆601,下连杆602;车架1由焊接连接的第一垂向支架801、第二垂向支架802、第三垂向支架803、横向支架9、第一附件701、第一衬套1101和第二衬套1102组成;减震器总成2由左右对称分布的一对减震器、弹簧组成,减震器总成2组装在车架1和连杆支架5之间,提供减震和支撑作用;稳定杆4布置在车架1和驱动桥3之间,在车辆遇到侧向冲击时,能提供对应的侧向支撑作用,提高车辆的侧向稳定性;连杆支架5左右对称固定在驱动桥3上,连杆支架5、第三垂向支架803、上连杆601和下连杆602形成四连杆机构,在实现约束车轮跳动功能的同时还可以大大缩短上连杆601和下连杆602的长度,提高车架1强度的功能。
27.优选地,车架1上焊接工字形稳定支架,工字型稳定支架由第一垂向支架801、第二垂向支架802和横向支架9焊接而成。此结构加强了车架1的抗扭刚度和抗拉强度,在该线控底盘遇到横向冲击时,能显著提高车身的侧向稳定性。
28.优选地,上连杆601和下连杆602一端为u形,另一端为环形。连杆结构简单,组装方便,有效降低成本。
29.优选地,连杆支架5上开有第一安装孔1201、第二安装孔1202、第三安装孔1203,一对第一减重孔1301和一对第二减重孔1302。零件集成度高,而且在车轮通过不平路面时,车轮的振动不会直接传递到车身,对车身及车内货物冲击较小。
30.优选地,稳定杆4上设有螺母10,稳定杆4的一端与第一垂向支架801连接,另一端与第二附件702连接,能够调整底盘相对与车身的姿态,确保车轮两侧对称安装,能保证车辆行驶稳定性。
31.优选地,减震器总成2的上端连接第一附件701,下端与第三安装孔1203相连。
32.优选地,第一衬套1101、第二衬套1102焊接在第三垂向支架803;上连杆601一侧连接第一衬套1101,另一侧连接第一安装孔1201上;下连杆602一侧连接第二衬套1102,另一侧连接在第二安装孔1202上。提高了车架1的刚性,又能增强第一衬套1101、第二衬套1102的耐久使用寿命。
33.驱动桥不承担驱动功能,并不需要集成驱动电机单元和驱动半轴等零件,适用于非驱动轴,并能够布置更多其他零件。
34.实施例二,参阅图4,驱动桥3作为驱动轴,集成一套驱动差速机构,进一步地,还包括轮毂轴承14、制动器支架16,驱动桥3包括驱动半轴15、驱动电机17、传动机构18和差速机构19;驱动桥3上还焊接有第二附件702,制动器支架16设置在驱动桥3两端;轮毂轴承14与驱动半轴15连接;传动机构18将驱动电机17的扭矩传递给差速机构19并进一步传递给左右两根驱动半轴15,从而驱动车辆行驶。
35.驱动桥承担驱动功能,集成驱动电机、差速器、驱动电机传动机构和驱动半轴等零件,适用于驱动轴。此种驱动桥设计非常紧凑,振动噪声小,安装方便,成本优势明显。其余同实施例一。
36.尽管已经描述了本实用新型的实施例,对于本领域的普通技术人员而言,在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,均落入由所附权利要求及其等同物限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1