一种应用于电动助力转向扭矩补偿的自适应滤波方法与流程
本发明涉及汽车电动助力,尤其涉及一种应用于电动助力转向扭矩补偿的自适应滤波方法。
背景技术:
1、汽车转向系统经历多年的发展,目前,包括机械系统、液压系统、电液系统和电动系统以及线控系统等多种类型。随着科技的不断进步,电动助力转向系统(eps系统,electric power steering)目前是市场主流,电动助力转向系统(eps系统,electricpower steering)是一种依靠电机提供辅助转矩的动力转向系统。与传统的液压助力转向系统相比,eps系统具有许多优点,因此在现代汽车中得到了广泛应用。
2、eps系统主要由传感器(转矩和转角传感器)、助力电机、电机减速机构、控制器等部分组成。当驾驶员操纵方向盘时,转矩传感器会检测到转向盘的转向以及转矩的大小,将这些信号转换成电压信号输送到电子控制单元。电子控制单元根据转矩传感器检测到的转距电压信号、转动方向和车速信号等,向电动机控制器发出指令,使电动机输出相应大小和方向的转向助力转矩,从而产生辅助动力。当汽车不转向时,电子控制单元不向电动机控制器发出指令,电动机不工作。
3、eps系统在实际使用中驾驶员转动转向盘时,可以控制装置根据接收到的扭矩信号进行计算以提供相应助力,转矩传感器在接收信号时会受到转矩传感器内部噪声以及来自路面、电机减速器等外部机构的干扰。上述转矩传感器受到的干扰因素,将会导致对方向盘施加的转矩的感知存在一定的滞后,因此引起eps系统响应的延迟。eps系统响应的延迟会导致在驾驶员转动方向盘时,电机不能立即作出相应的动作,从而影响驾驶操纵手感。
技术实现思路
1、本发明的目的在于提供一种应用于电动助力转向扭矩补偿的自适应滤波方法,以解决在汽车行驶过程中,面对多种路面干扰,例如路面冲击,转向盘上的操纵力矩变化率呈现非线性趋势。由于转向系统受到摩擦、惯性和阻尼等多种干扰因素的影响,转矩传感器接收信号时受到自身噪声以及来自路面、电机减速器等额外机构的干扰。这些因素导致对转向盘转矩的感知存在一定的滞后,从而引起系统响应的延迟,会导致在驾驶员转动方向盘时,电机不能立即做出相应动作,进而影响驾驶操纵手感的问题。
2、本发明提供一种应用于电动助力转向扭矩补偿的自适应滤波方法,包括;
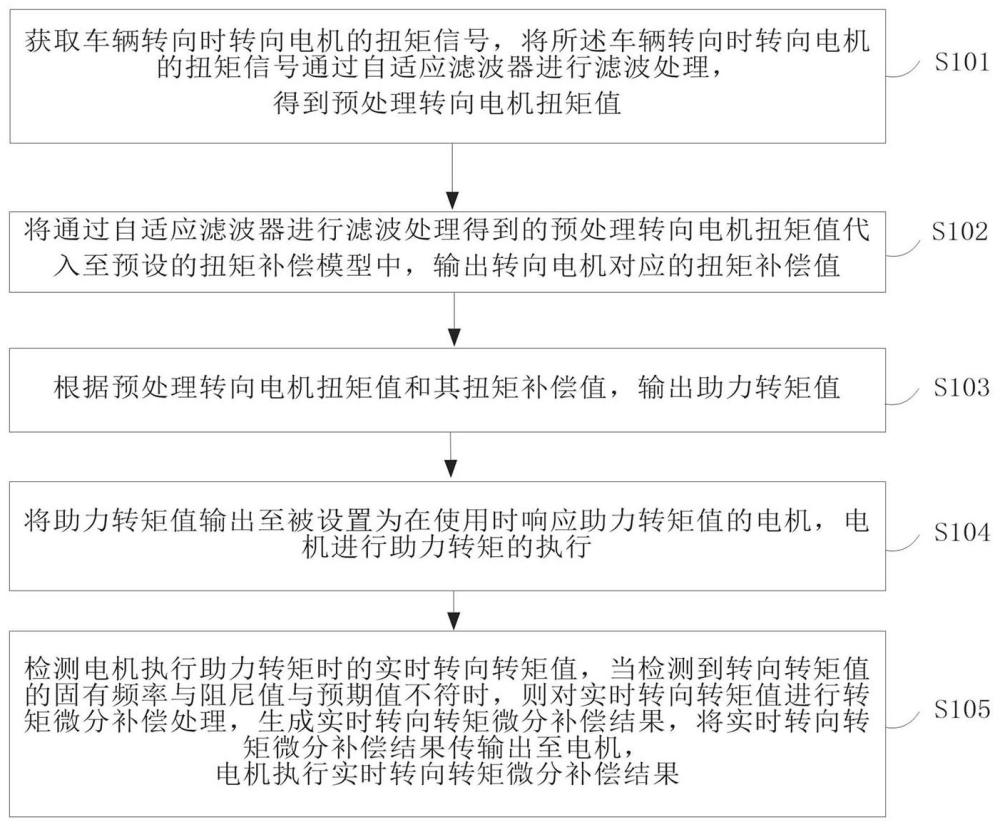
3、s101获取车辆转向时转向电机的扭矩信号,将所述车辆转向时转向电机的扭矩信号通过自适应滤波器进行滤波处理,得到预处理转向电机扭矩值;
4、s102将通过自适应滤波器进行滤波处理得到的预处理转向电机扭矩值代入至预设的扭矩补偿模型中,输出转向电机对应的扭矩补偿值;
5、s103根据预处理转向电机扭矩值和其扭矩补偿值,输出助力转矩值;
6、s104将助力转矩值输出至被设置为在使用时响应助力转矩值的电机,电机进行助力转矩的执行;
7、s105检测电机执行助力转矩时的实时转向转矩值,当检测到转向转矩值的固有频率与阻尼值与预期值不符时,则对实时转向转矩值进行转矩微分补偿处理,生成实时转向转矩微分补偿结果,将实时转向转矩微分补偿结果传输出至电机,电机执行实时转向转矩微分补偿结果。
8、进一步的,s101获取车辆转向时转向电机的扭矩信号,将所述车辆转向时转向电机的扭矩信号通过自适应滤波器进行滤波处理,得到预处理转向电机扭矩值,包括;
9、将传感器采集到的转向电机扭矩是模拟信号转化数字信号;
10、通过自适应滤波器内预设的深度学习模型对转向电机扭矩数字信号进行数据处理分析,得到期望输出信号;
11、将传感器实时采集的转向电机扭矩数字信号通过滤波器进行数据处理,得到滤波器输出信号,将滤波器输出信号与期望输出信号进行对比,得到误差信号;
12、将误差信号通过自适应滤波器内预设的自适应算法进行计算,得到预处理转向电机扭矩值。
13、进一步的,s101获取车辆转向时转向电机的扭矩信号,将所述车辆转向时转向电机的扭矩信号通过自适应滤波器进行滤波处理,得到预处理转向电机扭矩值,包括;
14、递归最小二乘rls自适应滤波器目标就是使输入值和期望值实时更新滤波器参数ω(k),使得积累的误差平方最小,定义的代价函数如下;
15、其中λ为遗忘因子,0<λ<1用于减弱过去数据的影响。
16、进一步的,s101获取车辆转向时转向电机的扭矩信号,将所述车辆转向时转向电机的扭矩信号通过自适应滤波器进行滤波处理,得到预处理转向电机扭矩值,包括;最有的滤波系数值为;
17、
18、进一步的,s101获取车辆转向时转向电机的扭矩信号,将所述车辆转向时转向电机的扭矩信号通过自适应滤波器进行滤波处理,得到预处理转向电机扭矩值,包括;最优估计系数为;
19、
20、
21、进一步的,s102将通过自适应滤波器进行滤波处理得到的预处理转向电机扭矩值代入至预设的扭矩补偿模型中,输出转向电机对应的扭矩补偿值,包括;
22、对转矩传感器检测到的转矩信号进行相位补偿,采用的超前校正器的传递函数为:
23、
24、其中0<α<1,t为相位补偿传递函数参数
25、从超前补偿环节特性可知,该补偿要覆盖扭矩信号频率范围,并且使扭矩补偿相位角最大值出现在相位延迟最严重的频率节点上,其超前环节相角表达式为;
26、
27、得到最大超前频率和最大超前相位角;
28、
29、
30、根据控制器的延迟时间及扭矩信号的频率范围在低频段进行计算可以得出α值,在实际应用中简化t。
31、进一步的,s103根据预处理转向电机扭矩值和其扭矩补偿值,输出助力转矩值,包括;
32、在汽车受到路面干扰时,可将其所受到的所有外部力矩tw全部等效至小齿轮处,可得小齿轮的受力方程为:
33、其中,jp为整个转向系统的转动惯量,bs为转向系统的阻尼,ks为扭杆刚度,θp为小齿轮转角。
34、进一步的,s105检测电机执行助力转矩时的实时转向转矩值,当检测到转向转矩值的固有频率与阻尼值与预期值不符时,则对实时转向转矩值进行转矩微分补偿处理,生成实时转向转矩微分补偿结果,将实时转向转矩微分补偿结果传输出至电机,电机执行实时转向转矩微分补偿结果,包括;
35、当转向系统具有较大的固有频率和较小的阻尼比时,引入转矩微分控制环节,即在原有的控制中加入转向盘转矩的微分信号,补偿后的电机助力转矩为;
36、
37、tm为补偿后电机主力转矩,ts为转矩传感器检测的转矩,ki为助力增益,kd为转矩微分补偿系数,其中0<kd<0.1;
38、系统频率和阻尼相应变化为;
39、
40、
41、进一步的,s105检测电机执行助力转矩时的实时转向转矩值,当检测到转向转矩值的固有频率与阻尼值与预期值不符时,则对实时转向转矩值进行转矩微分补偿处理,生成实时转向转矩微分补偿结果,将实时转向转矩微分补偿结果传输出至电机,电机执行实时转向转矩微分补偿结果,包括;
42、对汽车转向进行实时数据采集,将实时采集的数据代入至遗忘数据分析公式中进行处理,遗忘数据分析公式为;
43、
44、其中将遗忘系数进行n阶幂指数,n通过k-i进行调节。
45、本发明的有益效果如下:
46、(1)本发明采用了自适应滤波器,可以根据工作中采集到的最优值信号进行更行迭代,其方法是不断衰减外界环境所带来的噪声干扰,将最优值和传感器输入信号进入滤波器后的信号进行误差比较,补偿相应的误差信号,得到最优的滤波器系数。
47、(2)采用一种补偿模型,采用扭矩相位补偿,可以按照不同系统所具有的迟滞相应进行相应最优补偿。
48、(3)采用转矩微分补偿,根据要求改变系统固有的阻尼比,当主力增大时,适当增大微分补偿系数来增大系统阻尼比,转向轻便性即得到了改善,又避免了转向盘手感变差。
- 还没有人留言评论。精彩留言会获得点赞!