转向机构的保护方法、装置、设备、介质和产品与流程
本技术涉及车辆,特别是涉及一种转向机构的保护方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术:
1、随着汽车技术的不断发展,电动助力转向系统逐渐成为主流。
2、传统技术中,电动助力转向系统是实现转向助力的关键部件。然而,在某些情况下,由于车辆运行数据的不准确或失效,可能会导致转向助力电机的控制出现问题,从而导致转向机构的保护的失效风险偏高。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够降低转向机构保护的失效风险的转向机构的保护方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种转向机构的保护方法。应用于车辆,所述车辆包括转向助力电机和行程卸荷阀;所述方法包括:
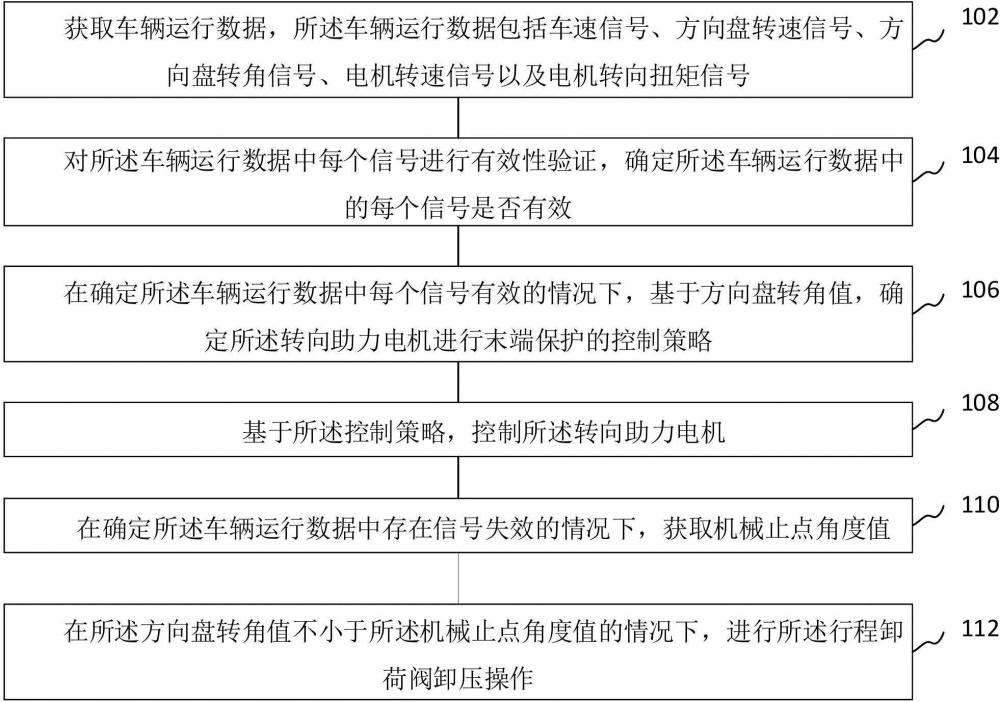
3、获取车辆运行数据,所述车辆运行数据包括车速信号、方向盘转速信号、方向盘转角信号、电机转速信号以及电机转向扭矩信号;
4、对所述车辆运行数据中每个信号进行有效性验证,确定所述车辆运行数据中的每个信号是否有效;
5、在确定所述车辆运行数据中每个信号有效的情况下,基于方向盘转角值,确定所述转向助力电机进行末端保护的控制策略;
6、基于所述控制策略,控制所述转向助力电机;
7、在确定所述车辆运行数据中存在信号失效的情况下,获取机械止点角度值;
8、在所述方向盘转角值不小于所述机械止点角度值的情况下,进行所述行程卸荷阀卸压操作。
9、在其中一个实施例中,所述对所述车辆运行数据中每个信号进行有效性验证,确定所述车辆运行数据中每个信号是否有效,包括:
10、获取所述车辆运行数据中每个信号对应的有效性标志位;
11、在所述车辆运行数据中每个信号对应的有效性标志位指示所述信号有效的情况下,确定所述车速信号中车速是否小于预设车速阈值;
12、在所述车速小于预设车速阈值的情况下,确定所述车辆运行数据中的每个信号有效。
13、在其中一个实施例中,所述基于方向盘转角值,确定所述转向助力电机进行末端保护的控制策略,包括:
14、获取硬止点角度值和软止点角度值;
15、在所述方向盘转角值大于所述软止点角度值、且小于所述硬止点角度值的情况下,基于所述方向盘转角值、所述软止点角度值以及所述硬止点角度值,确定降助力系数;
16、基于所述降助力系数,生成所述转向助力电机进行末端保护的控制策略。
17、在其中一个实施例中,所述方法还包括:
18、在所述方向盘转角值不小于所述硬止点角度值、且小于所述机械止点角度值的情况下,获取预设反力系数和方向盘手力矩;
19、基于所述预设反力系数和方向盘手力矩,生成所述转向助力电机进行末端保护的控制策略。
20、在其中一个实施例中,所述获取硬止点角度值和软止点角度值,包括:
21、获取转向保护量和转向过度量;
22、基于所述机械止点角度值和所述转向保护量,确定所述硬止点角度值;
23、基于所述硬止点角度值和所述转向过度量,确定所述软止点角度值。
24、在其中一个实施例中,所述基于所述方向盘转角值、所述软止点角度值以及所述硬止点角度值,确定降助力系数,包括:
25、基于所述方向盘转角值、所述软止点角度值以及所述硬止点角度值,获取转向百分比;
26、基于所述转向百分比和预设二次插值公式,计算降助力系数。
27、第二方面,本技术还提供了一种转向机构的保护装置。应用于车辆,所述车辆包括转向助力电机和行程卸荷阀;所述装置包括:
28、数据获取模块,用于获取车辆运行数据,所述车辆运行数据包括车速信号、方向盘转速信号、方向盘转角信号、电机转速信号以及电机转向扭矩信号;
29、信号确定模块,用于对所述车辆运行数据中每个信号进行有效性验证,确定所述车辆运行数据中的每个信号是否有效;
30、策略确定模块,用于在确定所述车辆运行数据中每个信号有效的情况下,基于方向盘转角值,确定所述转向助力电机进行末端保护的控制策略;
31、电机控制模块,用于基于所述控制策略,控制所述转向助力电机;
32、机械止点获取模块,用于在确定所述车辆运行数据中存在信号失效的情况下,获取机械止点角度值;
33、卸压操作进行模块,用于在所述方向盘转角值不小于所述机械止点角度值的情况下,进行所述行程卸荷阀卸压操作。
34、第三方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
35、获取车辆运行数据,所述车辆运行数据包括车速信号、方向盘转速信号、方向盘转角信号、电机转速信号以及电机转向扭矩信号;
36、对所述车辆运行数据中每个信号进行有效性验证,确定所述车辆运行数据中的每个信号是否有效;
37、在确定所述车辆运行数据中每个信号有效的情况下,基于方向盘转角值,确定所述转向助力电机进行末端保护的控制策略;
38、基于所述控制策略,控制所述转向助力电机;
39、在确定所述车辆运行数据中存在信号失效的情况下,获取机械止点角度值;
40、在所述方向盘转角值不小于所述机械止点角度值的情况下,进行所述行程卸荷阀卸压操作。
41、第四方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
42、获取车辆运行数据,所述车辆运行数据包括车速信号、方向盘转速信号、方向盘转角信号、电机转速信号以及电机转向扭矩信号;
43、对所述车辆运行数据中每个信号进行有效性验证,确定所述车辆运行数据中的每个信号是否有效;
44、在确定所述车辆运行数据中每个信号有效的情况下,基于方向盘转角值,确定所述转向助力电机进行末端保护的控制策略;
45、基于所述控制策略,控制所述转向助力电机;
46、在确定所述车辆运行数据中存在信号失效的情况下,获取机械止点角度值;
47、在所述方向盘转角值不小于所述机械止点角度值的情况下,进行所述行程卸荷阀卸压操作。
48、第五方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
49、获取车辆运行数据,所述车辆运行数据包括车速信号、方向盘转速信号、方向盘转角信号、电机转速信号以及电机转向扭矩信号;
50、对所述车辆运行数据中每个信号进行有效性验证,确定所述车辆运行数据中的每个信号是否有效;
51、在确定所述车辆运行数据中每个信号有效的情况下,基于方向盘转角值,确定所述转向助力电机进行末端保护的控制策略;
52、基于所述控制策略,控制所述转向助力电机;
53、在确定所述车辆运行数据中存在信号失效的情况下,获取机械止点角度值;
54、在所述方向盘转角值不小于所述机械止点角度值的情况下,进行所述行程卸荷阀卸压操作。
55、上述转向机构的保护方法、装置、计算机设备、存储介质和计算机程序产品,获取车辆运行数据,对车辆运行数据中每个信号进行有效性验证,确定车辆运行数据中的每个信号是否有效;在确定车辆运行数据中每个信号有效的情况下,基于方向盘转角值,确定转向助力电机进行末端保护的控制策略;基于控制策略,控制转向助力电机;在确定车辆运行数据中存在信号失效的情况下,获取机械止点角度值;在方向盘转角值不小于机械止点角度值的情况下,进行行程卸荷阀卸压操作。采用本方法,通过转向助力电机和行程卸荷阀,协同作用来保护车辆转向机构的正常运行,实现了一定层度上降低转向机构保护的失效风险。同时,通过实时监测和验证车辆运行数据,保证了转向助力电机在各种行驶条件下都能提供稳定、可靠的助力,从而提高了驾驶的安全性。
- 还没有人留言评论。精彩留言会获得点赞!